You might also like
- 21 - Le Schéma Cinématique MinimaleDocument22 pages21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairNo ratings yet
- Conception Mécanique - Analyse Structurelle CMDocument22 pagesConception Mécanique - Analyse Structurelle CMsie Rachid TraoreNo ratings yet
- CoursDocument61 pagesCoursBen Aissa ChokriNo ratings yet
- FS Statique Plane Resolution GraphiqueDocument2 pagesFS Statique Plane Resolution Graphiquejsp10No ratings yet
- Chapitre 2 - Partie 1 - CSMTDocument28 pagesChapitre 2 - Partie 1 - CSMTsalman wardiNo ratings yet
- Systemes Isostatiques PDFDocument5 pagesSystemes Isostatiques PDFImmamHadramyNo ratings yet
- TD Doc ÉlèveDocument12 pagesTD Doc ÉlèveMurakamiensNo ratings yet
- Liaison EncastrementDocument18 pagesLiaison Encastrementkhocine100% (1)
- Cours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Document8 pagesCours Les Liaison Mecaniques 2016 2017 (ABIDI MOURAD) (Lycée de Fériana)Youssef CherniNo ratings yet
- 11 - Cinematique Liaisons EquivalentesDocument19 pages11 - Cinematique Liaisons Equivalentessaded05No ratings yet
- (M06b) Statique GraphiqueDocument2 pages(M06b) Statique GraphiqueFaustin Kouassi100% (1)
- TD 2 Liaisons Schéma CinématiqueDocument6 pagesTD 2 Liaisons Schéma CinématiqueNadhir MehellouNo ratings yet
- 002 Schema CinematiqueDocument5 pages002 Schema CinematiqueMounir Douggaz100% (1)
- Train Epicycloidal Simple PDFDocument4 pagesTrain Epicycloidal Simple PDFEdgar ÉtapeNo ratings yet
- Schéma CinématiqueDocument41 pagesSchéma CinématiquesadikiNo ratings yet
- Guidage en Translation PDFDocument10 pagesGuidage en Translation PDFAzerty DelegfrNo ratings yet
- Exercice ReducteurDocument8 pagesExercice ReducteurGyNo ratings yet
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéDocument2 pagesLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- Cine Graph EleveDocument8 pagesCine Graph EleveMohammed DahbiNo ratings yet
- Dess 1 Cours - Modelisation - Des - Liaisons - eDocument7 pagesDess 1 Cours - Modelisation - Des - Liaisons - eelvis etienneNo ratings yet
- 00 2023 TD Révisions PTSI PTDocument8 pages00 2023 TD Révisions PTSI PTimadbourzamNo ratings yet
- Sec Minesponts 2004 Sic PSIDocument12 pagesSec Minesponts 2004 Sic PSIAlexandre BourrieauNo ratings yet
- Examen A05 SolutionDocument7 pagesExamen A05 SolutionAbdallah SbaghdiNo ratings yet
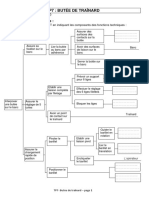
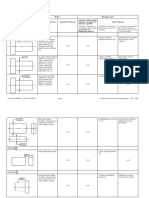
- 07 Butee TrainardDocument5 pages07 Butee TrainardHkiri MohamedNo ratings yet
- CC1 Im1 Ie1 17 18Document1 pageCC1 Im1 Ie1 17 18Hamza RimiNo ratings yet
- TD02 Les Chaines FonctionnellesDocument7 pagesTD02 Les Chaines FonctionnellesPOU DannyNo ratings yet
- DM Quille PendulaireDocument5 pagesDM Quille PendulaireFilouNo ratings yet
- Cours Modelisation Des LiaisonsDocument4 pagesCours Modelisation Des LiaisonsAristide DOSSOUNo ratings yet
- TD N°3 PFS Analytique - 3Document6 pagesTD N°3 PFS Analytique - 3Yassine BouchattaNo ratings yet
- Technologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveDocument2 pagesTechnologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveBouabdellaoui saif ennasrNo ratings yet
- Cours Modelisation Des Liaisons eDocument7 pagesCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- TCP-05-Rep-Projection-Orthogonale P 44Document1 pageTCP-05-Rep-Projection-Orthogonale P 44Jujo BugaNo ratings yet
- P - Etude6 - Les LiaisonsDocument4 pagesP - Etude6 - Les LiaisonsSamsun GalaxNo ratings yet
- TD 18 - Lois Entrée-Sortie en Position Et en VitesseDocument6 pagesTD 18 - Lois Entrée-Sortie en Position Et en Vitessebhs channelNo ratings yet
- DT DC1 4TT ModifDocument3 pagesDT DC1 4TT ModifyahyaouiNo ratings yet
- TD de SI - MécaniqueDocument3 pagesTD de SI - MécaniqueArthur TigreatNo ratings yet
- Exercices ENSAMDocument14 pagesExercices ENSAMAnass AzamiNo ratings yet
- Procedes D'asemblageDocument85 pagesProcedes D'asemblageImed SeghierNo ratings yet
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDocument2 pagesCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienNo ratings yet
- Archiveur Multimedia MecaniqueDocument3 pagesArchiveur Multimedia Mecaniquechaouch.najehNo ratings yet
- Cotation Des Trous Et ExerciceDocument1 pageCotation Des Trous Et ExercicerzougarzougaNo ratings yet
- TP Treuil ProfDocument6 pagesTP Treuil ProfmidounNo ratings yet
- Pro 2017Document14 pagesPro 2017Crazy ytNo ratings yet
- Choix Module Rapport Des Vitesses Engrenage Droit PDFDocument2 pagesChoix Module Rapport Des Vitesses Engrenage Droit PDFRayen BettaebNo ratings yet
- Liaisons Equival TDDocument18 pagesLiaisons Equival TDAyou HamNo ratings yet
- Technologie: Note: ./20Document3 pagesTechnologie: Note: ./20Marouen MekkiNo ratings yet
- Cours Modelisation Des Liaisons eDocument8 pagesCours Modelisation Des Liaisons entayoub100% (1)
- Pro Ma 2007 PDFDocument2 pagesPro Ma 2007 PDFfabricelNo ratings yet
- Exercices Specif CorrigeDocument8 pagesExercices Specif CorrigeSalah-eddine ZitiNo ratings yet
- 130 Engrenages PreparationDocument9 pages130 Engrenages PreparationIkram MisbahNo ratings yet
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonDocument8 pagesCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkNo ratings yet
- Numeration EleecDocument21 pagesNumeration EleecSalif NanaNo ratings yet
- Dessin D'ensDocument27 pagesDessin D'ensIsrae El AmriNo ratings yet
- Devoir Sq8 StatiqueDocument8 pagesDevoir Sq8 StatiqueRuben100% (1)
- C R Reducteur 1Document16 pagesC R Reducteur 1Amal AmalNo ratings yet
- Le Schema CinematiqueDocument3 pagesLe Schema Cinematiqueiraoui jamal (Ebay)0% (2)
- Modelisation CinematiqueDocument16 pagesModelisation CinematiqueAnonymous tNIpOVPyNo ratings yet
- Schéma CinématiqueDocument48 pagesSchéma CinématiqueomatrNo ratings yet
- Liaisons Mã©caniques Et Schã©ma Cinã©matiqueDocument32 pagesLiaisons Mã©caniques Et Schã©ma Cinã©matiqueMohamedNo ratings yet
- Schéma Cinématique Serre-Joint - PpsDocument25 pagesSchéma Cinématique Serre-Joint - PpsErica Franco50% (4)
- Microprocesseur 8088 8086Document86 pagesMicroprocesseur 8088 8086Afenspy Pipose100% (3)
- 2013 2014 L3ASR TD TCP CorrigeDocument3 pages2013 2014 L3ASR TD TCP CorrigeDOUNIANo ratings yet
- 434Document40 pages434DOUNIANo ratings yet
- 6 ELN Electronique Des Systèmes Embarqués - 11septDocument77 pages6 ELN Electronique Des Systèmes Embarqués - 11septDOUNIANo ratings yet
- 2013 2014 L3ASR TD TCP CorrigeDocument3 pages2013 2014 L3ASR TD TCP CorrigeDOUNIANo ratings yet
- Asg 9 Reseaux IndustrielsDocument34 pagesAsg 9 Reseaux IndustrielsHamza Ibrahim HafidiNo ratings yet
- Microprocesseur 8088 8086Document86 pagesMicroprocesseur 8088 8086Afenspy Pipose100% (3)
- CapteursDocument12 pagesCapteursMôhãmêd BèñNo ratings yet
- Les Reseaux de ZeroDocument134 pagesLes Reseaux de ZeroTristan SeutyNo ratings yet
- Cours ReseauDocument7 pagesCours ReseauDOUNIANo ratings yet
- Cours 4ème AnéeDocument11 pagesCours 4ème AnéeDOUNIANo ratings yet
- Cours 2Document33 pagesCours 2Eric Louis PemNo ratings yet
- DoneDocument5 pagesDoneDOUNIANo ratings yet
- Cours 2Document33 pagesCours 2Eric Louis PemNo ratings yet
- Reseaux - Cours 5 - Datagrammes IP - ARP - ICMP PDFDocument49 pagesReseaux - Cours 5 - Datagrammes IP - ARP - ICMP PDFDOUNIANo ratings yet
- DoneDocument15 pagesDoneDOUNIANo ratings yet
- Matlab 1Document56 pagesMatlab 1Mstfa BenNo ratings yet
- 15 Exercices Corrigés Sur La Machine À Courant ContinuDocument31 pages15 Exercices Corrigés Sur La Machine À Courant Continuzakaria ziko Z95% (42)
- Cours Reseau PDFDocument87 pagesCours Reseau PDFrimafettaNo ratings yet
- CapteursDocument12 pagesCapteursMôhãmêd BèñNo ratings yet
- Asg 9 Reseaux IndustrielsDocument34 pagesAsg 9 Reseaux IndustrielsHamza Ibrahim HafidiNo ratings yet
- Electronique Tome2 PDFDocument258 pagesElectronique Tome2 PDFDOUNIANo ratings yet
- PolyasmDocument54 pagesPolyasmDOUNIA100% (1)
- Electron I QueDocument90 pagesElectron I QueDOUNIANo ratings yet
- Chap5 Elec H 300Document86 pagesChap5 Elec H 300DOUNIANo ratings yet
- Memento AsmDocument1 pageMemento AsmDOUNIANo ratings yet
- Ch1 Machine A Courant ContinuDocument31 pagesCh1 Machine A Courant Continuarnaud29100% (7)
- Moteur A Courant ContinuDocument11 pagesMoteur A Courant Continusonacome100% (3)
- Asg 9 Reseaux IndustrielsDocument34 pagesAsg 9 Reseaux IndustrielsHamza Ibrahim HafidiNo ratings yet
- Comment Créer Une Table Des MatièresDocument12 pagesComment Créer Une Table Des MatièresYann FeutseuNo ratings yet
- Mypdf6 PDFDocument14 pagesMypdf6 PDFEm EttahriNo ratings yet
- Relations D'équivalence, IDocument0 pagesRelations D'équivalence, IPaul Jeannot0% (1)
- Fiches Matieres GM S1 Tronc Commun PDFDocument11 pagesFiches Matieres GM S1 Tronc Commun PDFelbornyNo ratings yet
- Poly Rayonnement 1718Document87 pagesPoly Rayonnement 1718totoNo ratings yet
- Eval 3 PCT LGL + Corrigé 351Document6 pagesEval 3 PCT LGL + Corrigé 351Flavien TonyNo ratings yet
- Chapitre 2 PoutreComposite-RapportDocument16 pagesChapitre 2 PoutreComposite-RapportAhmed DiagneNo ratings yet
- Chapitre 1 Introduction GénéraleDocument3 pagesChapitre 1 Introduction Généraleمحمد بورمضانNo ratings yet
- 3er Leçon Classement Les RèglesDocument5 pages3er Leçon Classement Les Règlesablomaiga1996No ratings yet
- UNITÉ 1 - La Cinématique: Sph3UDocument41 pagesUNITÉ 1 - La Cinématique: Sph3Uapi-528291418No ratings yet
- Méthodes Approximatives de Calculs Des Fréquences Propres Usthb 2020Document10 pagesMéthodes Approximatives de Calculs Des Fréquences Propres Usthb 2020Zaouai SaidNo ratings yet
- c9 TC Inter Prof Sbiro (WWW - Pc1.ma)Document2 pagesc9 TC Inter Prof Sbiro (WWW - Pc1.ma)cpm fessaisNo ratings yet
- Équipement de RacordementDocument89 pagesÉquipement de RacordementtkNo ratings yet
- Le Package Tcolorbox - Apprendre Le LaTeX / Mohammed JaitiDocument501 pagesLe Package Tcolorbox - Apprendre Le LaTeX / Mohammed JaitiMohammed Ali Jaiti Souhail100% (2)
- TP Thermodynamique Définition D'une Pompe À ChaleurDocument4 pagesTP Thermodynamique Définition D'une Pompe À ChaleurggNo ratings yet
- Cours Debit eDocument40 pagesCours Debit eAimé BazedNo ratings yet
- Cours S IDocument84 pagesCours S Imohamed hayballaNo ratings yet
- Plan CoursDocument8 pagesPlan CoursZineddine AlicheNo ratings yet
- Exercices Unité 2.3Document5 pagesExercices Unité 2.3AnthonyNo ratings yet
- Mecanique de FluideDocument26 pagesMecanique de FluideNarapati NantabogaNo ratings yet
- Fiche Icarus 40.17Document4 pagesFiche Icarus 40.17gerard CONSOLONo ratings yet
- L'optique GéométriqueDocument18 pagesL'optique GéométriqueZakari Yae100% (1)
- CITEL 2CP 202012fr PL12-CAT6Document1 pageCITEL 2CP 202012fr PL12-CAT6Polo CasdenNo ratings yet
- Logarithme NeperienDocument1 pageLogarithme Neperienprescytufele28No ratings yet
- Cap Et Intsru CH2 (Cour Prof)Document54 pagesCap Et Intsru CH2 (Cour Prof)daniel mousdirNo ratings yet
- CHAP 9 Réaction Rédox-DosageDocument3 pagesCHAP 9 Réaction Rédox-Dosagetoto TOTOROTONo ratings yet
- Qui Suis-JeDocument2 pagesQui Suis-JeKilian PaulsNo ratings yet
- Element - 45 - 1091-8.note de Calcul Du Béton ArméDocument132 pagesElement - 45 - 1091-8.note de Calcul Du Béton ArméJean KouassiNo ratings yet
- Rapport - EL Kassim Bachri PDFDocument59 pagesRapport - EL Kassim Bachri PDFJihane Berrada100% (1)