You might also like
- Megger FORMDocument1 pageMegger FORMMai-mai Camposagrado100% (1)
- MUX10 Service TSFEX01010 PDFDocument65 pagesMUX10 Service TSFEX01010 PDFVo Hong Vinh100% (3)
- ACS336-ACS6336-ACS6110 Helicopter Open-Loop Control Exercise V2Document11 pagesACS336-ACS6336-ACS6110 Helicopter Open-Loop Control Exercise V2DiabloNo ratings yet
- Joystick Controlled Robot Arm Using An ArduinoDocument5 pagesJoystick Controlled Robot Arm Using An ArduinoMuhd Muhd HasifNo ratings yet
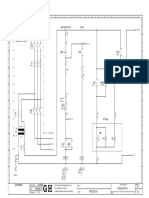
- GH Electrical Wiring DiagramDocument7 pagesGH Electrical Wiring DiagramJc LamNo ratings yet
- 3 To 8 Decoder in NGSPICEDocument14 pages3 To 8 Decoder in NGSPICEJaydip FadaduNo ratings yet
- Arduino LED FSMDocument4 pagesArduino LED FSMRehman KhanNo ratings yet
- 365 Final Project Bernacki DykeDocument51 pages365 Final Project Bernacki Dykeapi-312670860No ratings yet
- Multi Function Shield ExamplesDocument5 pagesMulti Function Shield ExamplespierdonneNo ratings yet
- Fixed Point Adder VerilogDocument11 pagesFixed Point Adder VerilogUday A Korat100% (1)
- Streaming With Ffmpeg and FfserverDocument4 pagesStreaming With Ffmpeg and FfserverDaniel A. Moreno BarónNo ratings yet
- Vichy VC97 SpecificationsDocument6 pagesVichy VC97 SpecificationsOrdoviciumNo ratings yet
- Upgrade DIR-825 G1 FirmwareDocument11 pagesUpgrade DIR-825 G1 FirmwareVasudev GovindanNo ratings yet
- Lab 6 SolDocument5 pagesLab 6 Solcoatesy1991No ratings yet
- VTOLT Build InstructionsDocument95 pagesVTOLT Build Instructionsnguyễn ngọc ánh100% (1)
- Laboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionDocument8 pagesLaboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionSaad KamranNo ratings yet
- N N N N: - PF Is Not Given, So Assume 0.85 and - Efficiency 88 %Document6 pagesN N N N: - PF Is Not Given, So Assume 0.85 and - Efficiency 88 %Rane SiddeshNo ratings yet
- Bascom and AVR, EncodersDocument5 pagesBascom and AVR, Encodersulil amriNo ratings yet
- nRF24L01 Program Example GuideDocument9 pagesnRF24L01 Program Example GuideryantzNo ratings yet
- SpectreRF Simulation TutorialDocument110 pagesSpectreRF Simulation TutorialHaoWangNo ratings yet
- Akx 14Document116 pagesAkx 14Edgard DelRio100% (1)
- AlgoX-11Document25 pagesAlgoX-11tieuly.cocNo ratings yet
- Macro LasergrblDocument2 pagesMacro Lasergrblorganik makingNo ratings yet
- Code For Fruit Plucking Robot Using ATMEGA2560Document16 pagesCode For Fruit Plucking Robot Using ATMEGA2560Karthik K V Hathwar100% (2)
- 99-Counter-Module-Displays-Count-7-SegmentDocument4 pages99-Counter-Module-Displays-Count-7-SegmentHarsimranNo ratings yet
- Homework 3 - SolutionsDocument14 pagesHomework 3 - SolutionsYahya Salam SalehNo ratings yet
- A 8bit Sequential MultiplierDocument6 pagesA 8bit Sequential MultiplierJyoti TeliNo ratings yet
- Top Module / Module DPLL (SignalIn, SignalOutDocument10 pagesTop Module / Module DPLL (SignalIn, SignalOutbigjimmNo ratings yet
- RS232 FinalcodeDocument9 pagesRS232 FinalcodeAsif BuddhaNo ratings yet
- DIY Boost Converter How To Step Up DC Voltage Effi PDFDocument5 pagesDIY Boost Converter How To Step Up DC Voltage Effi PDFHans Sebastian Navarrete LopezNo ratings yet
- Uline Ice Machines Service and PartsDocument76 pagesUline Ice Machines Service and Partsdan theman0% (1)
- PRBSDocument4 pagesPRBSshabi09040% (1)
- IAI 09 RC General CJ0203-2A P523-718 ControllerDocument196 pagesIAI 09 RC General CJ0203-2A P523-718 ControllerElectromateNo ratings yet
- ECE2274 Pre-Lab For MOSFET Logic NAND Gate, NOR Gate, and CMOS Inverter 1. Nmos Nand GateDocument6 pagesECE2274 Pre-Lab For MOSFET Logic NAND Gate, NOR Gate, and CMOS Inverter 1. Nmos Nand GateRudra MishraNo ratings yet
- Interfacing Keypad and LCD with PIC18F452Document11 pagesInterfacing Keypad and LCD with PIC18F452hira NawazNo ratings yet
- msp430 MSPGCC Eclipse Ubuntu TutorialDocument15 pagesmsp430 MSPGCC Eclipse Ubuntu TutorialPeter Šamperl89% (9)
- FB 43Document3 pagesFB 43Bassel AlmouieNo ratings yet
- One Wire ProtocolDocument22 pagesOne Wire ProtocolPiPo Tui100% (1)
- Flip FlopsDocument21 pagesFlip Flopsmangla bhullar100% (1)
- PIC TutorialDocument203 pagesPIC TutorialUnwana James0% (1)
- Lab9 VHDLDocument8 pagesLab9 VHDLFasli CoolNo ratings yet
- How To Run Multiple Floodlight Controllers With FlowVisorDocument3 pagesHow To Run Multiple Floodlight Controllers With FlowVisorGema AlavaNo ratings yet
- JHD629 204aDocument22 pagesJHD629 204apiyushpandeyNo ratings yet
- Programming Codes Obstacle Avoiding RobocarDocument17 pagesProgramming Codes Obstacle Avoiding RobocarBryan WongNo ratings yet
- BDC Program To Create Routings Through BDCDocument10 pagesBDC Program To Create Routings Through BDCswapnil_265051509No ratings yet
- Air-to-Water Heat Pump (50Hz, R410A) 5BPM0-01C (Replace:5BPM0-01B)Document73 pagesAir-to-Water Heat Pump (50Hz, R410A) 5BPM0-01C (Replace:5BPM0-01B)CallGRNo ratings yet
- Report to determine TR request statusDocument21 pagesReport to determine TR request statusSachin AdakNo ratings yet
- Dayananda Sagar College of Engineering: Mini-Project Report (Microprocessors)Document13 pagesDayananda Sagar College of Engineering: Mini-Project Report (Microprocessors)Nandan MaheshNo ratings yet
- Ch341a Mini Flash ProgrammerDocument5 pagesCh341a Mini Flash ProgrammerLeoned Cova Orozco0% (1)
- Computing Comp1/Pm/Vbn: General Certificate of Education Advanced Subsidiary Examination June 2010Document10 pagesComputing Comp1/Pm/Vbn: General Certificate of Education Advanced Subsidiary Examination June 2010nurahfisaNo ratings yet
- MC 35E / MC 45 / MC 65 / MC 90: InnovensDocument12 pagesMC 35E / MC 45 / MC 65 / MC 90: Innovenskoscoloi365No ratings yet
- 2-D Geometry: TransformationsDocument14 pages2-D Geometry: TransformationsSumit Kumar VohraNo ratings yet
- Lab 10Document6 pagesLab 10Mei QiiNo ratings yet
- DCN AssignmentsDocument4 pagesDCN Assignmentsanirudhshekh0% (1)
- Configuration Script MA5600T DSLAM V2Document7 pagesConfiguration Script MA5600T DSLAM V2Ahmed SalemNo ratings yet
- Unor3smbus 2.inoDocument6 pagesUnor3smbus 2.inoM. Randy AswinNo ratings yet
- Codan 9323-9360 Reference ManualDocument228 pagesCodan 9323-9360 Reference ManualHelen HelenopoulosNo ratings yet
- PRE2Document119 pagesPRE2Phạm Thanh BìnhNo ratings yet
- PRF192- PFC TRAN DANG KHOADocument8 pagesPRF192- PFC TRAN DANG KHOATran Dang Khoa (K17 HCM)No ratings yet
- UPSiteManual ENGDocument79 pagesUPSiteManual ENGPujangga Tanpa NamaNo ratings yet
- Verilog Lab SolutionsDocument15 pagesVerilog Lab Solutionsraja_ramalingam07No ratings yet
- Controler PDFDocument15 pagesControler PDFKhoiril HudaNo ratings yet
- Lesson 14 Rotary EncoderDocument8 pagesLesson 14 Rotary EncodercarphoneNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Nba 2k14 Manual PC Online Final v1 CoverDocument11 pagesNba 2k14 Manual PC Online Final v1 Covereumesmo222No ratings yet
- CSS Cheat SheetDocument6 pagesCSS Cheat SheetLakmal HimbutugodaNo ratings yet
- Core CSharp and NET Quick ReferenceDocument2 pagesCore CSharp and NET Quick ReferenceFaryne100% (11)
- Core HTML 1Document6 pagesCore HTML 1wordpress_consultNo ratings yet
- Microsoft Foundation Classes (MFC) Quick ReferenceDocument19 pagesMicrosoft Foundation Classes (MFC) Quick ReferenceAriv AlaganNo ratings yet
- Physics Investigatory Project-1Document30 pagesPhysics Investigatory Project-1Horrible WorldNo ratings yet
- Lofa El240g1hsDocument2 pagesLofa El240g1hsDouglas MNo ratings yet
- DC Power PresentationDocument25 pagesDC Power PresentationTiya IcTee Chirwa67% (3)
- Power Xpert UX ManualDocument65 pagesPower Xpert UX Manualaquaboy1024No ratings yet
- MOS Capacitor - StructureDocument22 pagesMOS Capacitor - Structurerounak aliNo ratings yet
- A02 SOW Appendix 3 IMSE Master Part ListDocument134 pagesA02 SOW Appendix 3 IMSE Master Part ListrizkyNo ratings yet
- Industrial Range Sincro PDFDocument6 pagesIndustrial Range Sincro PDFHalit YalçınkayaNo ratings yet
- Topic:-: Physics Project WorkDocument12 pagesTopic:-: Physics Project WorkjkljklNo ratings yet
- KIEMBOM2Document20 pagesKIEMBOM2Anh TrầnsvbkNo ratings yet
- Principle of Ward Leonard MethodDocument2 pagesPrinciple of Ward Leonard MethodHazizi KhairyNo ratings yet
- SG3400 3125 2500HV-20 PDFDocument1 pageSG3400 3125 2500HV-20 PDFnalvaro88No ratings yet
- Data Sheet: 74HC/HCT00Document5 pagesData Sheet: 74HC/HCT00Iulian CurcaNo ratings yet
- SdadadsDocument4 pagesSdadadsadapa1234No ratings yet
- M3AA 250SMA 4 Product DetailsDocument3 pagesM3AA 250SMA 4 Product DetailsPeter PenhaNo ratings yet
- AC Motors Protection Against Short CircuitsDocument4 pagesAC Motors Protection Against Short Circuitsat35No ratings yet
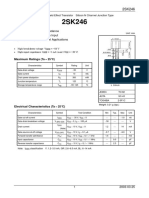
- 2SK246Document5 pages2SK246ytnateNo ratings yet
- 1MBC05D 060Document6 pages1MBC05D 060Anderson CarrielNo ratings yet
- PDF Q1 Mod 1 EIM GRADE 12 NewDocument10 pagesPDF Q1 Mod 1 EIM GRADE 12 NewCloud DullasNo ratings yet
- Finder-Italy Aux Relay Cat PDFDocument219 pagesFinder-Italy Aux Relay Cat PDFngocanhvyNo ratings yet
- 05 Excitation Basics of Rectifiers (Notes Pages)Document19 pages05 Excitation Basics of Rectifiers (Notes Pages)JŐn PardédéNo ratings yet
- WEG Sca06 Eco5 Modulo de Expansao de Comunicacao 10003320700 Guia de Instalacao Portugues BRDocument24 pagesWEG Sca06 Eco5 Modulo de Expansao de Comunicacao 10003320700 Guia de Instalacao Portugues BRAnderson Ricardo PradoNo ratings yet
- 85 87 Radcom Mar05Document3 pages85 87 Radcom Mar05Billy NoonNo ratings yet
- Transformer Circuit Analysis and Performance CalculationsDocument3 pagesTransformer Circuit Analysis and Performance CalculationsSuktara-Drubatara TaritNo ratings yet
- Wi 12341Document1 pageWi 12341Carlos YinnaxNo ratings yet
- Inverted Ladder DACDocument11 pagesInverted Ladder DACmurali_227No ratings yet
- Installations - EMV-Guide-ENG V1.43Document47 pagesInstallations - EMV-Guide-ENG V1.43sayed atefNo ratings yet