You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Features General Description: High Performance Single Synchronous Buck Converter GS7317Document1 pageFeatures General Description: High Performance Single Synchronous Buck Converter GS7317Imma Real Pcy50% (2)
- (PDF) The Digital Einstein Papers - The Collected Papers of Albert EinsteinDocument6 pages(PDF) The Digital Einstein Papers - The Collected Papers of Albert EinsteinjuenkkinNo ratings yet
- Genius Publications ListDocument5 pagesGenius Publications ListArun Trichal25% (4)
- Ipad and Ipad Pro vs. MacBook and MacBook Pro - Which Should You Buy - IMoreDocument21 pagesIpad and Ipad Pro vs. MacBook and MacBook Pro - Which Should You Buy - IMoreFILESONICNo ratings yet
- TN Appsvr144 Overview of Scripting in System Platform - InSource KnowledgeCenterDocument5 pagesTN Appsvr144 Overview of Scripting in System Platform - InSource KnowledgeCenterjuenkkinNo ratings yet
- Why Can Projects, Blocks or The HW Config Either Not Be Opened at All or Only Open... - ID - 22809379 - Industry Support SiemensDocument2 pagesWhy Can Projects, Blocks or The HW Config Either Not Be Opened at All or Only Open... - ID - 22809379 - Industry Support Siemensjuenkkin100% (1)
- I Am Lacking The WinCC Component Object Manager PackageDocument3 pagesI Am Lacking The WinCC Component Object Manager PackagejuenkkinNo ratings yet
- Solved - Shown in The Figure Below Is A Simplified Dynamic ...Document2 pagesSolved - Shown in The Figure Below Is A Simplified Dynamic ...juenkkinNo ratings yet
- 8-/10-Channel, Low Voltage, Low Power,: - AdcsDocument44 pages8-/10-Channel, Low Voltage, Low Power,: - AdcsjuenkkinNo ratings yet
- Quiz 1Document6 pagesQuiz 1juenkkinNo ratings yet
- (SOLVED) Data Error (Cyclic Redundancy Check) - Driver EasyDocument10 pages(SOLVED) Data Error (Cyclic Redundancy Check) - Driver EasyjuenkkinNo ratings yet
- Configurint MBTCP DAServerDocument11 pagesConfigurint MBTCP DAServerHenrique TrebilcockNo ratings yet
- 4 Methods To Fix Toshiba External Hard Drive Not Working Error - EaseUSDocument14 pages4 Methods To Fix Toshiba External Hard Drive Not Working Error - EaseUSjuenkkinNo ratings yet
- 4 Methods To Fix Toshiba External Hard Drive Not Working Error - EaseUSDocument14 pages4 Methods To Fix Toshiba External Hard Drive Not Working Error - EaseUSjuenkkinNo ratings yet
- Lista de Verbos Regulares e IrregularesDocument11 pagesLista de Verbos Regulares e IrregularesHenry Valverde100% (1)
- A Scheme For A Flexible Classification of Dietary and Health Biomarkers2017Genes and NutritionOpen AccessDocument15 pagesA Scheme For A Flexible Classification of Dietary and Health Biomarkers2017Genes and NutritionOpen AccessjuenkkinNo ratings yet
- Como Hablar PDFDocument24 pagesComo Hablar PDFOscar Alfonso Hernandez NiklitschekNo ratings yet
- Description Wincc Project Scanner en PDFDocument9 pagesDescription Wincc Project Scanner en PDFjuenkkinNo ratings yet
- Description Wincc Project Scanner en PDFDocument9 pagesDescription Wincc Project Scanner en PDFjuenkkinNo ratings yet
- 13 Iccge2012l30007Document5 pages13 Iccge2012l30007L30N1No ratings yet
- Viewme-In003 - En-E (FactoryTalk View Machine Edition - Installation Guide, 2013-01)Document50 pagesViewme-In003 - En-E (FactoryTalk View Machine Edition - Installation Guide, 2013-01)MancamiaicuruNo ratings yet
- 2711pc-Um001 - En-P (PanelView Plus Compact Terminals - User Manual), 2009-03Document132 pages2711pc-Um001 - En-P (PanelView Plus Compact Terminals - User Manual), 2009-03MancamiaicuruNo ratings yet
- An Archestra Object Can't Be C... Her User... - InSource KnowledgeCenterDocument2 pagesAn Archestra Object Can't Be C... Her User... - InSource KnowledgeCenterjuenkkinNo ratings yet
- Truyenthong CPNet FC, FBDocument334 pagesTruyenthong CPNet FC, FBNguyễn Anh TúNo ratings yet
- WinCC Communication en-US en-US PDFDocument554 pagesWinCC Communication en-US en-US PDFjuenkkinNo ratings yet
- PCS7 Tips&TricksDocument618 pagesPCS7 Tips&TricksJorge50% (2)
- STM32 PeripheralsDocument91 pagesSTM32 Peripheralschaouachitaoufik100% (4)
- PCS7 Tips&TricksDocument618 pagesPCS7 Tips&TricksJorge50% (2)
- Webinar stm32 20170511 PDFDocument141 pagesWebinar stm32 20170511 PDFsushisenseiNo ratings yet
- DasSIDirect PDFDocument156 pagesDasSIDirect PDFjuenkkinNo ratings yet
- NetToPLCsim Manual enDocument11 pagesNetToPLCsim Manual enjuenkkin100% (1)
- HistClient SP1Document874 pagesHistClient SP1sexybeest3384No ratings yet
- Step-By-Step Guide For Storage Manager For SANs in Windows Server 2008Document19 pagesStep-By-Step Guide For Storage Manager For SANs in Windows Server 2008Awais Mirza100% (3)
- Simple Network Management Protocol: by - Suparna SriDocument64 pagesSimple Network Management Protocol: by - Suparna SriMayank GoyalNo ratings yet
- Okuma Osp5000Document2 pagesOkuma Osp5000Zoran VujadinovicNo ratings yet
- Walt's Blog 2014 References & RegulatorsDocument2 pagesWalt's Blog 2014 References & RegulatorsNicolasNo ratings yet
- Computer GensDocument4 pagesComputer Genssiva_aelNo ratings yet
- Abbreviations (Updated)Document18 pagesAbbreviations (Updated)muhammad.wbaigNo ratings yet
- Oracle Handy CommandsDocument14 pagesOracle Handy CommandsPadmashali KumarNo ratings yet
- Win8.1 BT 8 0-1-322 Release Note AcerDocument7 pagesWin8.1 BT 8 0-1-322 Release Note AcerNahia BonahoraNo ratings yet
- COPA1 Stsem QBDocument44 pagesCOPA1 Stsem QBsahil chadha100% (1)
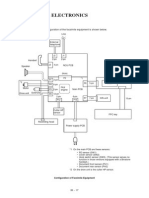
- Tuesday, 16 November 2021 - Afternoon Discovering ElectronicsDocument20 pagesTuesday, 16 November 2021 - Afternoon Discovering Electronicsnvmalt070No ratings yet
- Firewall Group10Document26 pagesFirewall Group10Cindy BitongNo ratings yet
- Multiprocessor Systems:: Advanced Operating SystemDocument60 pagesMultiprocessor Systems:: Advanced Operating SystemshaiqNo ratings yet
- 3 Ece - PDC Unit - I PDFDocument64 pages3 Ece - PDC Unit - I PDFSree VamsiNo ratings yet
- Vaidehi - Patil Computer BDocument1 pageVaidehi - Patil Computer BSamiksha ChavanNo ratings yet
- VIRTUAL KEYBOARD AviDocument29 pagesVIRTUAL KEYBOARD AviKiran KumarNo ratings yet
- Sonet PDFDocument44 pagesSonet PDFspmeceNo ratings yet
- Linux Filesystem Hierarchy: The Linux Documentation ProjectDocument29 pagesLinux Filesystem Hierarchy: The Linux Documentation ProjectthewhiteeyeNo ratings yet
- P0562-Battery Voltage LowDocument7 pagesP0562-Battery Voltage Lowguillermoal539100% (1)
- Brother 190 SM 04Document19 pagesBrother 190 SM 04Sunny SinghNo ratings yet
- IC NT 2 5 3 New Features ListDocument17 pagesIC NT 2 5 3 New Features ListMaxiSanchezNo ratings yet
- 4.3G SystemsDocument20 pages4.3G SystemsMedin JazvinNo ratings yet
- ADM1.Using DL Define in T24Document12 pagesADM1.Using DL Define in T24Trần Hữu Lượng100% (1)
- 15 Common PC Problems and How To Troubleshoot Them - HongkiatDocument18 pages15 Common PC Problems and How To Troubleshoot Them - Hongkiatያሲን ሁሴንNo ratings yet
- Question: Complete The Corresponding Assembly Language Fragments BDocument3 pagesQuestion: Complete The Corresponding Assembly Language Fragments BHJFNo ratings yet
- Tips For IesDocument3 pagesTips For Iesasheokand172No ratings yet
- FD-X Series: IO-Link Instruction ManualDocument8 pagesFD-X Series: IO-Link Instruction ManualJenny Gonzalo MadrigalNo ratings yet
- Effective Cmake Daniel Pfeifer Cppnow 05-19-2017Document106 pagesEffective Cmake Daniel Pfeifer Cppnow 05-19-2017masterhacksNo ratings yet