You might also like
- Power System Operation & Control M.tech (Regular)Document41 pagesPower System Operation & Control M.tech (Regular)Mohammad MasiehNo ratings yet
- BTech ECEDocument28 pagesBTech ECERajesh MohanNo ratings yet
- B.Tech. DEGREE Instrumentation and Control Engineering: Syllabus FOR Credit Based CurriculumDocument66 pagesB.Tech. DEGREE Instrumentation and Control Engineering: Syllabus FOR Credit Based CurriculumRajashree RaviNo ratings yet
- Approved Latest MS Ph.D. Courses For FBGS-16Document14 pagesApproved Latest MS Ph.D. Courses For FBGS-16Ali AzanNo ratings yet
- An Artificial Immune System Approach For The Fault Detection and Diagnosis of A DC MachineDocument6 pagesAn Artificial Immune System Approach For The Fault Detection and Diagnosis of A DC MachineInahp RamukNo ratings yet
- Principle Component Analysis Based Data Mining For Contingency Analysis On IEEE 30 Bus Power SystemDocument5 pagesPrinciple Component Analysis Based Data Mining For Contingency Analysis On IEEE 30 Bus Power Systemyafei maNo ratings yet
- On - Line Stator Winding Inter - Turn Short - CircuitDocument17 pagesOn - Line Stator Winding Inter - Turn Short - Circuitsaidoune abdelmalekNo ratings yet
- Recent Developments Induction Motor Drives Fault Diagnosis Using AI TechniquesDocument8 pagesRecent Developments Induction Motor Drives Fault Diagnosis Using AI Techniquesfahim47No ratings yet
- Volken 1996Document10 pagesVolken 1996nevinkoshyNo ratings yet
- Electronics and Communication EngineeringDocument8 pagesElectronics and Communication Engineeringshamnadhm371No ratings yet
- Tomographic Testing and Validation of Probabilistic CircuitsDocument6 pagesTomographic Testing and Validation of Probabilistic CircuitsLucian BelghiruNo ratings yet
- B.Tech. Degree in Instrumentation and Control Engineering SyllabusDocument61 pagesB.Tech. Degree in Instrumentation and Control Engineering SyllabusWilson dela FuenteNo ratings yet
- 184069-ID-noneDocument7 pages184069-ID-noneZara AraNo ratings yet
- Optimal PMU Placement Using ILPDocument36 pagesOptimal PMU Placement Using ILPSneha JogdhankarNo ratings yet
- JNTUK EEE Syllabus 2020-21Document22 pagesJNTUK EEE Syllabus 2020-21Pothula SateeshNo ratings yet
- Fault Detection of PM Synchronous Motor Via Modulating FunctionsDocument6 pagesFault Detection of PM Synchronous Motor Via Modulating Functionsjithesh87No ratings yet
- A Fault Steady State Component-Based Wide Area Backup Protection AlgorithmDocument8 pagesA Fault Steady State Component-Based Wide Area Backup Protection Algorithmpmahesh268No ratings yet
- Ijaiem 2013 10 31 070Document7 pagesIjaiem 2013 10 31 070International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Base Computer Based Measuring TechniquesDocument104 pagesBase Computer Based Measuring TechniquesmakayaboNo ratings yet
- Wearable Impedance Analyzer Based On AD5933: Liviu Breniuc and Valeriu David Cristian-Győző HabaDocument6 pagesWearable Impedance Analyzer Based On AD5933: Liviu Breniuc and Valeriu David Cristian-Győző HabajuanitoingNo ratings yet
- Design of Low Power / High Speed Multiplier Using Spurious Power Suppression Technique (SPST)Document5 pagesDesign of Low Power / High Speed Multiplier Using Spurious Power Suppression Technique (SPST)anji.guvvalaNo ratings yet
- WearableDocument6 pagesWearablegpaivNo ratings yet
- M.Tech Power Electronics SyllabusDocument46 pagesM.Tech Power Electronics Syllabusmessage4guruNo ratings yet
- M.E. Applied ElectronicsDocument40 pagesM.E. Applied ElectronicsRaja RamachandranNo ratings yet
- Implementation of 2-Bit Multiplier Circuit Using Pass Transistor LogicDocument10 pagesImplementation of 2-Bit Multiplier Circuit Using Pass Transistor LogicIJRASETPublicationsNo ratings yet
- A High-Speed/Low-Power Multiplier Using An Advanced Spurious Power Suppression TechniqueDocument4 pagesA High-Speed/Low-Power Multiplier Using An Advanced Spurious Power Suppression TechniqueBappy DebnathNo ratings yet
- Fault Diagnosis in Analog Electronic Circuits - THDocument16 pagesFault Diagnosis in Analog Electronic Circuits - THBorut ViNo ratings yet
- Plan PIC network using RS485Document19 pagesPlan PIC network using RS485Trương Tuấn VũNo ratings yet
- Biju Patnaik University of Technology, Orissa: Electrical & Electronics Engineering (Eee)Document6 pagesBiju Patnaik University of Technology, Orissa: Electrical & Electronics Engineering (Eee)Abhijit PattnaikNo ratings yet
- Slite Embedded Ieee 2010Document28 pagesSlite Embedded Ieee 2010ashvinrymond55No ratings yet
- Multichannel Data Acquisition SystemDocument11 pagesMultichannel Data Acquisition SystemIJRASETPublicationsNo ratings yet
- Analog SimulationDocument9 pagesAnalog SimulationMotaz Ahmad AmeenNo ratings yet
- Creation of Stability Index For Micro Grids: I. Vokony, A. Dán DRDocument4 pagesCreation of Stability Index For Micro Grids: I. Vokony, A. Dán DRrazarazaeeNo ratings yet
- Syllabus Ee 2015Document12 pagesSyllabus Ee 2015Pangambam Swami MeietiNo ratings yet
- PG Curriculum 2010Document10 pagesPG Curriculum 2010Saravanakumar SivagurunathanNo ratings yet
- Ece Syllabus MakautDocument31 pagesEce Syllabus MakautGourav MondalNo ratings yet
- Eee 2-2 Sem Cs & Syllabus Ug r20Document20 pagesEee 2-2 Sem Cs & Syllabus Ug r20Aditya Kumar TikkireddiNo ratings yet
- Hardware ObservationDocument96 pagesHardware ObservationRam ComputersNo ratings yet
- BTech ECE Semester-6Document15 pagesBTech ECE Semester-6Arighna BasakNo ratings yet
- Medium Voltage Electrical System ReDocument19 pagesMedium Voltage Electrical System ReBet KèoNo ratings yet
- Optimal Allocation of TCSC Devices Using Genetic AlgorithmsDocument5 pagesOptimal Allocation of TCSC Devices Using Genetic AlgorithmsMas Hud ANo ratings yet
- Fuzzy Logic-Based Clustering for Extending WSN LifetimeDocument46 pagesFuzzy Logic-Based Clustering for Extending WSN LifetimeAatray SinghNo ratings yet
- M.Tech Power Systems Curriculum and SyllabiDocument87 pagesM.Tech Power Systems Curriculum and SyllabiAsheesh K SinghNo ratings yet
- M.E. Power Electronics and Drives Curriculum 2002 For Full TimeDocument26 pagesM.E. Power Electronics and Drives Curriculum 2002 For Full Timesbaskarv100% (1)
- EEE 2-2 CS Syllabus - UG - R20Document30 pagesEEE 2-2 CS Syllabus - UG - R20205.Vyshnavi GrandhiNo ratings yet
- A Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationsDocument13 pagesA Solution To Remote Detection of Illegal Electricity Usage Via Power Line CommunicationsSai RamNo ratings yet
- Identification of Brushless Excitation System Model Parameters at Different Operating Conditions Via Field TestsDocument7 pagesIdentification of Brushless Excitation System Model Parameters at Different Operating Conditions Via Field TestsFrozzy17No ratings yet
- Third Year Sem A Sem B UpdatedDocument40 pagesThird Year Sem A Sem B UpdatedArpitNo ratings yet
- Multilevel Power Optimization For ICA ProcessorDocument4 pagesMultilevel Power Optimization For ICA ProcessorIJSTENo ratings yet
- A PaperDocument5 pagesA PaperBikash DebnathNo ratings yet
- B.tech (Ee Ec Ei MCTR)Document239 pagesB.tech (Ee Ec Ei MCTR)tvNo ratings yet
- p4 - Applsci 11 02696 v2Document25 pagesp4 - Applsci 11 02696 v2Aritra SarkarNo ratings yet
- List of Experim Ents: Charotar University of Science & Technology Faculty of Technology & EngineeringDocument4 pagesList of Experim Ents: Charotar University of Science & Technology Faculty of Technology & Engineeringsharath h sNo ratings yet
- System Identification Algorithm For Systems With Interval CoefficientsDocument8 pagesSystem Identification Algorithm For Systems With Interval Coefficientseetn1100% (1)
- Five Input Majority Gate, A New DeviceDocument8 pagesFive Input Majority Gate, A New DeviceHarsh TibrewalNo ratings yet
- Recent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsFrom EverandRecent Advances in Chaotic Systems and Synchronization: From Theory to Real World ApplicationsOlfa BoubakerNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsFrom EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikNo ratings yet
- MEXT Recommendation Form InsightsDocument2 pagesMEXT Recommendation Form InsightsChân Gà NướngNo ratings yet
- Relay Coordination Chapter3Document13 pagesRelay Coordination Chapter3Chân Gà NướngNo ratings yet
- MEXT Recommendation Form InsightsDocument2 pagesMEXT Recommendation Form InsightsChân Gà NướngNo ratings yet
- 2016 RecommendationletterDocument2 pages2016 RecommendationletterExjack ReinterNo ratings yet
- Protective Relay SettingsDocument20 pagesProtective Relay SettingsChân Gà NướngNo ratings yet
- PRST CLP500SAS Substation-Automation ENDocument30 pagesPRST CLP500SAS Substation-Automation ENChân Gà NướngNo ratings yet
- Homework - Navigating LabVIEWDocument4 pagesHomework - Navigating LabVIEWMihaela PetreusNo ratings yet
- 2016 RecommendationletterDocument2 pages2016 RecommendationletterExjack ReinterNo ratings yet
- Lesson 1 - Navigating LabVIEWDocument85 pagesLesson 1 - Navigating LabVIEWChân Gà NướngNo ratings yet
- Series 220 Protection and Control: 2017-05-18 Version 2.0.0ENDocument35 pagesSeries 220 Protection and Control: 2017-05-18 Version 2.0.0ENChân Gà Nướng100% (1)
- Date Tema VECSDocument1 pageDate Tema VECSChân Gà NướngNo ratings yet
- Substation Line 220/110/20KV LEA 110KV Licenta: Header Test - 25Document4 pagesSubstation Line 220/110/20KV LEA 110KV Licenta: Header Test - 25Chân Gà NướngNo ratings yet
- CelulePV SfericeDocument14 pagesCelulePV SfericeIonut DraganNo ratings yet
- LABORATOR 4 Date Nominale - Marimi MasurateDocument1 pageLABORATOR 4 Date Nominale - Marimi MasurateChân Gà NướngNo ratings yet
- Chuong 2Document1 pageChuong 2Chân Gà NướngNo ratings yet
- First WeekDocument1 pageFirst WeekChân Gà NướngNo ratings yet
- Metoda Newton-Raphson: % Pasul 1. Matricea Ynn A Fost Deja Determinata AnteriorDocument4 pagesMetoda Newton-Raphson: % Pasul 1. Matricea Ynn A Fost Deja Determinata AnteriorChân Gà NướngNo ratings yet
- SEE - Lucrarea 1 - Metode by RoxDocument11 pagesSEE - Lucrarea 1 - Metode by RoxChân Gà NướngNo ratings yet
- Nep2 PDFDocument1 pageNep2 PDFChân Gà NướngNo ratings yet
- Etapa IDocument1 pageEtapa IChân Gà NướngNo ratings yet
- 1.4.1.2 Physical Connection To Ieds For Substation Control and AutomationDocument5 pages1.4.1.2 Physical Connection To Ieds For Substation Control and AutomationChân Gà NướngNo ratings yet
- Dms Telvent PDFDocument10 pagesDms Telvent PDFChân Gà NướngNo ratings yet
- Mathematic FormulationDocument1 pageMathematic FormulationChân Gà NướngNo ratings yet
- 2018 10 10-Tema-1Document28 pages2018 10 10-Tema-1Chân Gà NướngNo ratings yet
- Master Thesis Semestru2 15iunie2018Document14 pagesMaster Thesis Semestru2 15iunie2018Chân Gà NướngNo ratings yet
- Erasmus+ Programme: Inter-Institutional Agreement 2014-2021Document6 pagesErasmus+ Programme: Inter-Institutional Agreement 2014-2021Chân Gà NướngNo ratings yet
- Colagen Lichid CH Alpha PlusDocument1 pageColagen Lichid CH Alpha PlusChân Gà NướngNo ratings yet
- 0001 Monica Gets A New Roommate - La Moglie Mancata S1-D1-ADocument9 pages0001 Monica Gets A New Roommate - La Moglie Mancata S1-D1-AChing-Chiao ChangNo ratings yet
- 0001 Monica Gets A New Roommate - La Moglie Mancata S1-D1-ADocument16 pages0001 Monica Gets A New Roommate - La Moglie Mancata S1-D1-AChân Gà NướngNo ratings yet
- Componet of A Computer SystemDocument13 pagesComponet of A Computer System✬ SHANZA MALIK ✬No ratings yet
- DS-2DE4225IW-DE (S6) 2 MP 25× Network IR Speed DomeDocument7 pagesDS-2DE4225IW-DE (S6) 2 MP 25× Network IR Speed DomeAntonioMamaniHuanacuNo ratings yet
- 3 ARM ExceptionsDocument26 pages3 ARM ExceptionsSaket JainNo ratings yet
- CONTROL-M Job Parameter and Variable Reference Guide 20091008Document542 pagesCONTROL-M Job Parameter and Variable Reference Guide 20091008Rajni ChaudharyNo ratings yet
- Automatic Over Temperature Detection and AlertDocument5 pagesAutomatic Over Temperature Detection and Alertsmartxdigital marketNo ratings yet
- ACS310 Manual PDFDocument346 pagesACS310 Manual PDFJNo ratings yet
- Pridiom Multi-Zone Indoor and Outdoor Units GuideDocument29 pagesPridiom Multi-Zone Indoor and Outdoor Units Guidevizion2k4100% (1)
- Class 12 Sumita Arora C++ ch04 Classes and Objects PDFDocument20 pagesClass 12 Sumita Arora C++ ch04 Classes and Objects PDFAnikalp JaiswalNo ratings yet
- A Report On Computer NetworksDocument8 pagesA Report On Computer Networksfranklin bettNo ratings yet
- MongoDB Shell Cheat SheetDocument3 pagesMongoDB Shell Cheat SheetShivam AgrawalNo ratings yet
- VWorkspace 8.6.3 ReleaseNotesDocument10 pagesVWorkspace 8.6.3 ReleaseNotesRubén J. AguileraNo ratings yet
- DN P 3 Quick ReferenceDocument5 pagesDN P 3 Quick ReferenceGerman Mauricio Neira VargasNo ratings yet
- Delta Brochure Infrasuite enDocument27 pagesDelta Brochure Infrasuite enSadanand GowdaNo ratings yet
- Vivek - Win7Document234 pagesVivek - Win7blunt2vitreNo ratings yet
- Guide c07 744925 - SensorDocument88 pagesGuide c07 744925 - SensorJavierNo ratings yet
- Recorrection Cola-051935 NT 065Document76 pagesRecorrection Cola-051935 NT 065Vagish KirubaharanNo ratings yet
- 3.4 User InterfaceDocument3 pages3.4 User InterfaceMuhammad BilalNo ratings yet
- Lab 7 LRCDocument4 pagesLab 7 LRCChristina Jean-Francois100% (1)
- UM2411 User Manual: Discovery Kit With STM32H747XI MCUDocument61 pagesUM2411 User Manual: Discovery Kit With STM32H747XI MCUFarouk ElNo ratings yet
- Overview Functions Packages YRC1000 E 08.2019Document100 pagesOverview Functions Packages YRC1000 E 08.2019Mihail AvramovNo ratings yet
- Report On CpuDocument41 pagesReport On Cpubabu75% (4)
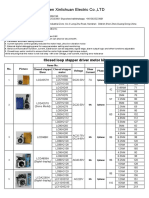
- Shenzhen Xinlichuan Electric Co.,LTD: Closed Loop Stepper Driver Motor KitDocument1 pageShenzhen Xinlichuan Electric Co.,LTD: Closed Loop Stepper Driver Motor KitIonescuTeodora100% (1)
- Dynamic RAM interfacing techniquesDocument3 pagesDynamic RAM interfacing techniquesrneevanNo ratings yet
- LM356Document25 pagesLM356Wilfredo Paniagua OrellanaNo ratings yet
- HwcompatDocument462 pagesHwcompatErick CardosoNo ratings yet
- User Manual: Product Type: Switching Power Supply Model Name: HG2, HP2, PSM, PSLDocument17 pagesUser Manual: Product Type: Switching Power Supply Model Name: HG2, HP2, PSM, PSLotrupon melliNo ratings yet
- What Is Virtualization AssignmentDocument27 pagesWhat Is Virtualization Assignmentedscott66No ratings yet
- Whats NewDocument26 pagesWhats NewDucha FamiNo ratings yet
- Types of Control Systems - Linear and Non Linear Control SystemDocument8 pagesTypes of Control Systems - Linear and Non Linear Control SystemLalita KumariNo ratings yet
- DEVICESDocument6 pagesDEVICESLalitNo ratings yet