You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Eccentric FootingDocument3 pagesEccentric FootingVarunn VelNo ratings yet
- P3 Past Papers Model AnswersDocument211 pagesP3 Past Papers Model AnswersEyad UsamaNo ratings yet
- Objective C StringsDocument3 pagesObjective C StringsKpsmurugesan KpsmNo ratings yet
- ContentDocument2 pagesContentKpsmurugesan KpsmNo ratings yet
- Objective C InheritanceDocument2 pagesObjective C InheritanceKpsmurugesan KpsmNo ratings yet
- FrontDocument7 pagesFrontKpsmurugesan KpsmNo ratings yet
- Objective C OperatorsDocument5 pagesObjective C OperatorsKpsmurugesan KpsmNo ratings yet
- ContendsDocument13 pagesContendsKpsmurugesan KpsmNo ratings yet
- College National Service SchemeDocument4 pagesCollege National Service SchemeKpsmurugesan KpsmNo ratings yet
- Objective C ConstantsDocument4 pagesObjective C ConstantsKpsmurugesan KpsmNo ratings yet
- Objective C ArraysDocument3 pagesObjective C ArraysKpsmurugesan KpsmNo ratings yet
- Learner'S Licence RegistrationDocument5 pagesLearner'S Licence RegistrationKpsmurugesan KpsmNo ratings yet
- Web Based Textile Monitoring and AnalyzingDocument5 pagesWeb Based Textile Monitoring and AnalyzingKpsmurugesan KpsmNo ratings yet
- An Internal Intrusion Detection System Using Data Mining TechniquesDocument7 pagesAn Internal Intrusion Detection System Using Data Mining TechniquesKpsmurugesan KpsmNo ratings yet
- Objective C FunctionsDocument3 pagesObjective C FunctionsKpsmurugesan KpsmNo ratings yet
- Bioinformatics Tactics For Protein ImprovementDocument4 pagesBioinformatics Tactics For Protein ImprovementKpsmurugesan KpsmNo ratings yet
- Visa Processing Information SystemDocument4 pagesVisa Processing Information SystemKpsmurugesan KpsmNo ratings yet
- Smart School Abstract..Document7 pagesSmart School Abstract..Kpsmurugesan KpsmNo ratings yet
- Tollgate Abstract OrgDocument5 pagesTollgate Abstract OrgKpsmurugesan KpsmNo ratings yet
- Inter Group Communication of Cued Click PointsDocument5 pagesInter Group Communication of Cued Click PointsKpsmurugesan KpsmNo ratings yet
- Herbarium AbsDocument5 pagesHerbarium AbsKpsmurugesan KpsmNo ratings yet
- Automated Query Resolver For College PlacementsDocument4 pagesAutomated Query Resolver For College PlacementsKpsmurugesan KpsmNo ratings yet
- Employee Interaction Using Social NetworkDocument6 pagesEmployee Interaction Using Social NetworkKpsmurugesan KpsmNo ratings yet
- Advance Text EditorDocument4 pagesAdvance Text EditorKpsmurugesan KpsmNo ratings yet
- Bank Account TrackerDocument3 pagesBank Account TrackerKpsmurugesan KpsmNo ratings yet
- Web Based Multi Farming SystemDocument6 pagesWeb Based Multi Farming SystemKpsmurugesan KpsmNo ratings yet
- En-Code and De-Code For Unique Person Using White-CardDocument5 pagesEn-Code and De-Code For Unique Person Using White-CardKpsmurugesan KpsmNo ratings yet
- Multiple Face Detection Based On Machine LeanringDocument7 pagesMultiple Face Detection Based On Machine LeanringKpsmurugesan KpsmNo ratings yet
- Image Retrieval Using CBIRDocument6 pagesImage Retrieval Using CBIRKpsmurugesan KpsmNo ratings yet
- Abnormal Event Detection in Videos Using Spatiotemporal AutoencoderDocument5 pagesAbnormal Event Detection in Videos Using Spatiotemporal AutoencoderKpsmurugesan KpsmNo ratings yet
- Bitcoin Pirce Prediction Using Machine LearningDocument8 pagesBitcoin Pirce Prediction Using Machine LearningKpsmurugesan KpsmNo ratings yet
- Heart Disease PredictionDocument6 pagesHeart Disease PredictionKpsmurugesan KpsmNo ratings yet
- 147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComDocument4 pages147 Amity Avenue Nampa, ID 81937 (999) 999-9999 William at Email - ComjeyesbelmenNo ratings yet
- FINAL SMAC Compressor Control Philosophy Rev4Document6 pagesFINAL SMAC Compressor Control Philosophy Rev4AhmedNo ratings yet
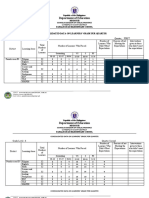
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- English Test For Grade 7 (Term 2)Document6 pagesEnglish Test For Grade 7 (Term 2)UyenPhuonggNo ratings yet
- SDS ERSA Rev 0Document156 pagesSDS ERSA Rev 0EdgarVelosoCastroNo ratings yet
- Sony x300 ManualDocument8 pagesSony x300 ManualMarcosCanforaNo ratings yet
- Documentation Report On School's Direction SettingDocument24 pagesDocumentation Report On School's Direction SettingSheila May FielNo ratings yet
- Data SheetDocument56 pagesData SheetfaycelNo ratings yet
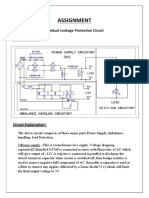
- Assignment: Residual Leakage Protection Circuit Circuit DiagramDocument2 pagesAssignment: Residual Leakage Protection Circuit Circuit DiagramShivam ShrivastavaNo ratings yet
- Prediction of Compressive Strength of Research PaperDocument9 pagesPrediction of Compressive Strength of Research PaperTaufik SheikhNo ratings yet
- CE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationDocument32 pagesCE162P MODULE 2 LECTURE 4 Analysis & Design of Mat FoundationPROSPEROUS LUCKILYNo ratings yet
- Inverter 2 chiềuDocument2 pagesInverter 2 chiềuKhánh Nguyễn MinhNo ratings yet
- WWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDocument8 pagesWWW Ranker Com List Best-Isekai-Manga-Recommendations Ranker-AnimeDestiny EasonNo ratings yet
- Pam8610 PDFDocument15 pagesPam8610 PDFRaka Satria PradanaNo ratings yet
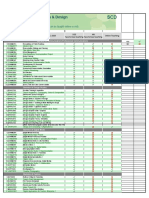
- SCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Document2 pagesSCD Course List in Sem 2.2020 (FTF or Online) (Updated 02 July 2020)Nguyễn Hồng AnhNo ratings yet
- "Tell Me and I Forget, Teach Me and I May Remember, Involve MeDocument1 page"Tell Me and I Forget, Teach Me and I May Remember, Involve MeBesufkad Yalew YihunNo ratings yet
- Table of Reinforcement Anchorage Length & Lap Length - Eurocode 2Document7 pagesTable of Reinforcement Anchorage Length & Lap Length - Eurocode 2NgJackyNo ratings yet
- Trucks Part NumbersDocument51 pagesTrucks Part NumbersBadia MudhishNo ratings yet
- 23 Ray Optics Formula Sheets Getmarks AppDocument10 pages23 Ray Optics Formula Sheets Getmarks AppSiddhant KaushikNo ratings yet
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyDocument12 pagesIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsNo ratings yet
- Six Sigma PresentationDocument17 pagesSix Sigma PresentationDhular HassanNo ratings yet
- Raiders of SuluDocument1 pageRaiders of SuluBlexx LagrimasNo ratings yet
- Determinant of Nurses' Response Time in Emergency Department When Taking Care of A PatientDocument9 pagesDeterminant of Nurses' Response Time in Emergency Department When Taking Care of A PatientRuly AryaNo ratings yet
- BDocument28 pagesBLubaNo ratings yet
- File RecordsDocument161 pagesFile RecordsAtharva Thite100% (2)
- Consecration of TalismansDocument5 pagesConsecration of Talismansdancinggoat23100% (1)
- The Bio-Based Economy in The NetherlandsDocument12 pagesThe Bio-Based Economy in The NetherlandsIrving Toloache FloresNo ratings yet
- MATH CIDAM - PRECALCULUS (Midterm)Document4 pagesMATH CIDAM - PRECALCULUS (Midterm)Amy MendiolaNo ratings yet