You might also like
- Part 2: Characteristics of A Measurement SystemDocument5 pagesPart 2: Characteristics of A Measurement System123andybNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Privacy Preserving Data MiningDocument80 pagesPrivacy Preserving Data MiningPrasanthi PrasuNo ratings yet
- CTeca SVillegas PBustillos ACalderon NRC7353 HW3 U3Document23 pagesCTeca SVillegas PBustillos ACalderon NRC7353 HW3 U3CUASPA ELIANA AIDEENo ratings yet
- Signal Operation Conversion - Course + ExerciseDocument63 pagesSignal Operation Conversion - Course + Exercisehasan bishNo ratings yet
- Cs Lab Manual in PDFDocument56 pagesCs Lab Manual in PDFvasukonetiNo ratings yet
- Ece113 Lec16 Low Noise Amplifier DesignDocument37 pagesEce113 Lec16 Low Noise Amplifier Design許耕立No ratings yet
- Noise DSB N SSB EEE367Document12 pagesNoise DSB N SSB EEE367SAWRAV DAS 1802039No ratings yet
- MICROELECTRONIC CIRCUITS AMPLIFIER BASICSDocument58 pagesMICROELECTRONIC CIRCUITS AMPLIFIER BASICSsid011No ratings yet
- Design and Simulation of LNA (Cadence Spectre RFDocument19 pagesDesign and Simulation of LNA (Cadence Spectre RFKushal GajavellyNo ratings yet
- Ece113 Lec17 Power Amplifier DesignDocument36 pagesEce113 Lec17 Power Amplifier Design許耕立No ratings yet
- Multichannel ModulationDocument25 pagesMultichannel ModulationMario E VillaltaNo ratings yet
- Microelectronic CircuitsDocument39 pagesMicroelectronic CircuitsVictor FrankensteinNo ratings yet
- Communication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirDocument58 pagesCommunication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirAhmad IrfanNo ratings yet
- Operational Amplifier BasicsDocument18 pagesOperational Amplifier Basicsdavid satyaNo ratings yet
- Op-Amp Circuits ExplainedDocument6 pagesOp-Amp Circuits Explainedkyope17No ratings yet
- TRANSFER FUNCTION TITLEDocument19 pagesTRANSFER FUNCTION TITLEDaniel GarcíaNo ratings yet
- Baseband Pulse and Digital SignalingDocument74 pagesBaseband Pulse and Digital SignalingYosef KirosNo ratings yet
- Lecture 10 - CpE 690 Introduction To VLSI DesignDocument54 pagesLecture 10 - CpE 690 Introduction To VLSI Designjvandome100% (1)
- Fundamentals of Mixed Signals and SensorsDocument4 pagesFundamentals of Mixed Signals and SensorsMaryjane PayaoNo ratings yet
- Operational Amplifiers - Aula 4Document27 pagesOperational Amplifiers - Aula 4Willian Cezar de Lima PintoNo ratings yet
- Here are the solutions:(a) v1 = 0 V, vdiff = -4 mV, vcm = -2 mV(b) v1 = 2.001 V, vdiff = -10 mV, vcm = 2.005 V (c) v3 = -4 V, vdiff = -4 mV, vcm = 2 V(d) vdiff = 0 V, vcm = -1.2 VDocument88 pagesHere are the solutions:(a) v1 = 0 V, vdiff = -4 mV, vcm = -2 mV(b) v1 = 2.001 V, vdiff = -10 mV, vcm = 2.005 V (c) v3 = -4 V, vdiff = -4 mV, vcm = 2 V(d) vdiff = 0 V, vcm = -1.2 V鄭又嘉No ratings yet
- Lecture2 and 3 - 11jan - OPAMP Characteristics and LM741Document22 pagesLecture2 and 3 - 11jan - OPAMP Characteristics and LM741f20213053No ratings yet
- Communication Systms Chap 2 PresentationDocument43 pagesCommunication Systms Chap 2 PresentationTooba SaharNo ratings yet
- Photo DetectorsDocument47 pagesPhoto DetectorsShubham SinghNo ratings yet
- Chapter OneDocument22 pagesChapter OneMedhanyeNo ratings yet
- Reducing Emissions in DC-DC Switched Mode Power Supplies by Gentex Corp.Document71 pagesReducing Emissions in DC-DC Switched Mode Power Supplies by Gentex Corp.Miguel PenarandaNo ratings yet
- What - Are - Signals - 2 Signal and Systems IiitbDocument36 pagesWhat - Are - Signals - 2 Signal and Systems Iiitbi dont knowNo ratings yet
- Concordia University Department of Electrical and Computer EngineeringDocument17 pagesConcordia University Department of Electrical and Computer EngineeringghaffarNo ratings yet
- Satellite Link Design: Joe Montana IT 488 - Fall 2003Document46 pagesSatellite Link Design: Joe Montana IT 488 - Fall 2003आशीष श्रीवास्तवNo ratings yet
- Switching Power Supply Design: Key Elements of a Discontinuous Mode Flyback ConverterDocument13 pagesSwitching Power Supply Design: Key Elements of a Discontinuous Mode Flyback ConverterPopescu LucianNo ratings yet
- ECE Formulae BookDocument39 pagesECE Formulae BookThashil Nagaraju Tnr TnrNo ratings yet
- Chapter 4 Amplitude ModulationDocument92 pagesChapter 4 Amplitude ModulationMohamed AliNo ratings yet
- Linearity Improvement TechniquesDocument58 pagesLinearity Improvement Techniquessravanreddykdp6050No ratings yet
- Unit - V Microwave FiltersDocument44 pagesUnit - V Microwave FiltersMamatha PagadalaNo ratings yet
- Presentation Op Amp Till 16.01.2024Document32 pagesPresentation Op Amp Till 16.01.2024Harsh AgarwalNo ratings yet
- Power Line EE Subjects PDFDocument225 pagesPower Line EE Subjects PDFPatrick Manalo63% (8)
- Frequency ResponseDocument30 pagesFrequency ResponseHarman Singh SomalNo ratings yet
- Adaptive Modulation Reduction of Peak-to-Average Power Ratio Channel Estimation OFDM in Frequency Selective Fading ChannelDocument49 pagesAdaptive Modulation Reduction of Peak-to-Average Power Ratio Channel Estimation OFDM in Frequency Selective Fading ChannelDong WangNo ratings yet
- OP Amps SolutionsDocument9 pagesOP Amps Solutionsivan.nasasira067No ratings yet
- All-in-One Op-Amp Laboratory Kit GuideDocument44 pagesAll-in-One Op-Amp Laboratory Kit GuideQodor MubarakNo ratings yet
- Introduction To: Fading Channels, Part 2 Fading Channels, Part 2Document39 pagesIntroduction To: Fading Channels, Part 2 Fading Channels, Part 2Ram Kumar GummadiNo ratings yet
- Digital Control System ModellingDocument28 pagesDigital Control System ModellingSonam AlviNo ratings yet
- Cse3213 06 Digitalsignals w2010Document23 pagesCse3213 06 Digitalsignals w2010sadasvNo ratings yet
- Ch4 (Compatibility Mode)Document46 pagesCh4 (Compatibility Mode)amanuel abrehaNo ratings yet
- EEE 4484 Lab 01 190041204Document25 pagesEEE 4484 Lab 01 190041204Sakif Ahbab, 190041212No ratings yet
- Noise and Interference FundamentalsDocument23 pagesNoise and Interference FundamentalsAmmarArshadNo ratings yet
- Lab Design and Analysis of Active CS and Cascode AmplifierDocument3 pagesLab Design and Analysis of Active CS and Cascode AmplifierAzure HereNo ratings yet
- Application Guide: Power EquationsDocument2 pagesApplication Guide: Power EquationsMark Mach AllenNo ratings yet
- CS Lab Manual OriginalDocument30 pagesCS Lab Manual OriginalK Vinod KumarNo ratings yet
- Op Amp Chapter SummaryDocument45 pagesOp Amp Chapter SummaryAbrar Ul HaqNo ratings yet
- Optical Receiver Theory and OperationDocument33 pagesOptical Receiver Theory and OperationJAYANTH KUMARNo ratings yet
- 9 Basic Examples Ug 2slidesperpageDocument12 pages9 Basic Examples Ug 2slidesperpageSwifty SpotNo ratings yet
- Chopper Basic PDFDocument12 pagesChopper Basic PDFSoumya DuttaNo ratings yet
- Path Loss Definition and CalculationDocument32 pagesPath Loss Definition and Calculationsaadi khanNo ratings yet
- Lecture 1 Communication SystemsDocument54 pagesLecture 1 Communication SystemsMina MounirNo ratings yet
- Simulation Analysis of Fly Back Converter Using Psim: AbstractDocument5 pagesSimulation Analysis of Fly Back Converter Using Psim: AbstractĐỗ Trịnh HoànNo ratings yet
- Lecture 4 Differential AmplifiersDocument21 pagesLecture 4 Differential Amplifierstranhieu_hcmutNo ratings yet
- Unit 3 Op AmpDocument28 pagesUnit 3 Op AmpMohd Hakimi ManafNo ratings yet
- Ovsf 11 PDFDocument16 pagesOvsf 11 PDFArshad MasihNo ratings yet
- Get TRDocDocument141 pagesGet TRDocG S SRIKANTHNo ratings yet
- 5968 2320eDocument36 pages5968 2320eZaheer Ahmed TanoliNo ratings yet
- Ad 0819141Document268 pagesAd 0819141G S SRIKANTHNo ratings yet
- Simulation of A Dual-Mode EDGE /W-CDMA Receiver With Digital IF Down ConversionDocument35 pagesSimulation of A Dual-Mode EDGE /W-CDMA Receiver With Digital IF Down ConversionG S SRIKANTHNo ratings yet
- Ovsf 11 PDFDocument16 pagesOvsf 11 PDFArshad MasihNo ratings yet
- AliberlangaDocument10 pagesAliberlangaSuryakant BharatiNo ratings yet
- Phase Noise BasicsDocument14 pagesPhase Noise Basicskhanafzaal2576No ratings yet
- First WCDMA Measurement Functions: Main Parameters of A WCDMA Mobile PhoneDocument3 pagesFirst WCDMA Measurement Functions: Main Parameters of A WCDMA Mobile PhoneG S SRIKANTHNo ratings yet
- Julaug1998 p26 PDFDocument7 pagesJulaug1998 p26 PDFG S SRIKANTHNo ratings yet
- Loop Filter OptimizationDocument30 pagesLoop Filter OptimizationIris ShtraslerNo ratings yet
- Noise Fundamentals: An Overview of Key Noise TerminologyDocument30 pagesNoise Fundamentals: An Overview of Key Noise TerminologyG S SRIKANTHNo ratings yet
- RF Receiver BasicsDocument46 pagesRF Receiver Basicsbayman66No ratings yet
- Carlin1979 002 PDFDocument7 pagesCarlin1979 002 PDFG S SRIKANTHNo ratings yet
- Application of Microwave Gaas Fets: California Eastern LaboratoriesDocument27 pagesApplication of Microwave Gaas Fets: California Eastern LaboratoriesG S SRIKANTHNo ratings yet
- Design of High Efficiency Broadband Amplifier Using RFT PDFDocument11 pagesDesign of High Efficiency Broadband Amplifier Using RFT PDFG S SRIKANTHNo ratings yet
- HX5100 Web DatasheetDocument4 pagesHX5100 Web DatasheetG S SRIKANTHNo ratings yet
- Experimebts in Optimization PDFDocument234 pagesExperimebts in Optimization PDFG S SRIKANTHNo ratings yet
- Design of High Efficiency Broadband Amplifier Using RFT PDFDocument11 pagesDesign of High Efficiency Broadband Amplifier Using RFT PDFG S SRIKANTHNo ratings yet
- Experimebts in Optimization PDFDocument234 pagesExperimebts in Optimization PDFG S SRIKANTHNo ratings yet
- Julaug1998 p26 PDFDocument7 pagesJulaug1998 p26 PDFG S SRIKANTHNo ratings yet
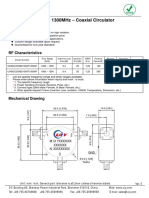
- 1000 to 1300MHz Coaxial Circulator Design Features and SpecificationsDocument1 page1000 to 1300MHz Coaxial Circulator Design Features and SpecificationsG S SRIKANTHNo ratings yet
- 1000 to 1300MHz Coaxial Circulator Design Features and SpecificationsDocument1 page1000 to 1300MHz Coaxial Circulator Design Features and SpecificationsG S SRIKANTHNo ratings yet
- Distortion and Noise PDFDocument37 pagesDistortion and Noise PDFSomanshu MishraNo ratings yet
- Atmel 8456 8 and 32 Bit Avr Microcontrollers Avr127 Understanding Adc Parameters Application NoteDocument24 pagesAtmel 8456 8 and 32 Bit Avr Microcontrollers Avr127 Understanding Adc Parameters Application NoteBiswajit SinghNo ratings yet
- Clamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesDocument10 pagesClamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesG S SRIKANTHNo ratings yet
- Clamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesDocument10 pagesClamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesG S SRIKANTHNo ratings yet
- Clamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesDocument10 pagesClamping of High Power RF Transistors and Rfics in Over-Molded Plastic PackagesG S SRIKANTHNo ratings yet
- Programmable Interval Timer.Document68 pagesProgrammable Interval Timer.BETHWEL KIPROTICH100% (1)
- A Simple Decoupling Method For 5G Millimeter-Wave MIMO Dielectric Resonator AntennasDocument11 pagesA Simple Decoupling Method For 5G Millimeter-Wave MIMO Dielectric Resonator Antennaskatherine zambranoNo ratings yet
- 4-Testing Differential ProtectionDocument36 pages4-Testing Differential ProtectionHassan TahaNo ratings yet
- Digi-Tool - PB-210D Calibration Unit For MCB-200 Digilon - Microwave BarrierDocument2 pagesDigi-Tool - PB-210D Calibration Unit For MCB-200 Digilon - Microwave BarrierMario Gabriel MoralliNo ratings yet
- Factors Affecting The Successful Implementation of ICT Projects in Government-With-Cover-Page-V2Document11 pagesFactors Affecting The Successful Implementation of ICT Projects in Government-With-Cover-Page-V2Banjani KalansooriyaNo ratings yet
- 2-The Transport LayerDocument10 pages2-The Transport Layer198W1A0591-SEC-B KOTHAPALLI CHAKRADHARNo ratings yet
- 4200 Roadm DsDocument3 pages4200 Roadm DsPandiNo ratings yet
- YourBTbill_21032024Document3 pagesYourBTbill_21032024faninhalemes25No ratings yet
- The Role of ICT in 21st Century ResearchDocument5 pagesThe Role of ICT in 21st Century ResearchEphraim ManlapazNo ratings yet
- Time Division MultiplexingDocument23 pagesTime Division MultiplexingAshish Ranjan0% (1)
- Surfing The Net British English Student Ver2Document3 pagesSurfing The Net British English Student Ver2EDGAR JAVIER OROZCO MONRROYNo ratings yet
- Design and Construction of A Yagi-Uda Antenna For The 433 MHZ BandDocument4 pagesDesign and Construction of A Yagi-Uda Antenna For The 433 MHZ BandHimanshu VermaNo ratings yet
- Ui 1007XS C - IdsDocument2 pagesUi 1007XS C - IdsGiovanniNo ratings yet
- IEEE 802.11 Technology Introduction: White Paper - Version 01.00 - Lisa Ward, Jörg KöppDocument32 pagesIEEE 802.11 Technology Introduction: White Paper - Version 01.00 - Lisa Ward, Jörg KöppSaarthak BhatiaNo ratings yet
- Power management in 802.11 wireless LANsDocument8 pagesPower management in 802.11 wireless LANssiva kumaarNo ratings yet
- Sampling and aliasing effectsDocument5 pagesSampling and aliasing effectsAbdullah WarraichNo ratings yet
- Chapter 1 What Is Data Engineering PDFDocument79 pagesChapter 1 What Is Data Engineering PDFChandra PutraNo ratings yet
- 7100 Command Reference ManualDocument166 pages7100 Command Reference ManualPavel Schukin100% (1)
- SISTEM DIGIT (DIGITAL SYSTEMS) Milestone 1 - Quartus II FamiliarizationDocument23 pagesSISTEM DIGIT (DIGITAL SYSTEMS) Milestone 1 - Quartus II Familiarizationمحمد ابو جرادNo ratings yet
- Letter of Intent For UnicityDocument2 pagesLetter of Intent For UnicityJf LarongNo ratings yet
- VPC Peering for Secure Data IntegrationDocument17 pagesVPC Peering for Secure Data IntegrationVishwaNo ratings yet
- Operations Manual Harmonic Contribution Encoders Ellipse Series PDFDocument280 pagesOperations Manual Harmonic Contribution Encoders Ellipse Series PDFAbderrahmen LotfiNo ratings yet
- GtuDocument8 pagesGtuShivamNo ratings yet
- NWS - On Board WeighingDocument6 pagesNWS - On Board WeighingHarsh Vardhan KhemkaNo ratings yet
- Military ATC Facility Frequencies - : Military Middle Airspace Radar (MARS) and Upper Airspace RadarDocument8 pagesMilitary ATC Facility Frequencies - : Military Middle Airspace Radar (MARS) and Upper Airspace Radarmarven5No ratings yet
- FTTx/GPON ONT Delivers Triple-Play ServicesDocument2 pagesFTTx/GPON ONT Delivers Triple-Play ServicesprasetyosterNo ratings yet
- Multi Stage Amplifiers: E.Susmitha Asst - Professor, Dept of ECE KITS, WarangalDocument27 pagesMulti Stage Amplifiers: E.Susmitha Asst - Professor, Dept of ECE KITS, WarangalRUSHIRAJ DASUNo ratings yet
- CCNP Exam Dumps Collection (3 - 2FFeb - 2F2018) - PDF - Cisco Systems - Cloud ComputingDocument23 pagesCCNP Exam Dumps Collection (3 - 2FFeb - 2F2018) - PDF - Cisco Systems - Cloud ComputingapollokimoNo ratings yet
- Do I Need A 1PPS Box For My Mulitbeam SystemDocument3 pagesDo I Need A 1PPS Box For My Mulitbeam SystemutkuNo ratings yet
- NET 221 - Network Management & DesignDocument23 pagesNET 221 - Network Management & DesignnickkaluluNo ratings yet