You might also like
- Python Pour Les NulsDocument549 pagesPython Pour Les NulsBelhamidi Mohammed Houssame88% (16)
- Mise en Forme Des MatériauxDocument24 pagesMise en Forme Des MatériauxAl-Jazari Al-Jazari100% (1)
- Freinage Miard PDFDocument42 pagesFreinage Miard PDFKamel Fedaoui80% (5)
- Resistance Des MateriauxDocument39 pagesResistance Des Materiauxtaki23No ratings yet
- Series TD Physique Analyse DimDocument4 pagesSeries TD Physique Analyse DimGhimodyka BegNo ratings yet
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysFrom EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNo ratings yet
- La Conception D'une Machine D'ébavurage Automatisée - Oueame BERRIANEDocument121 pagesLa Conception D'une Machine D'ébavurage Automatisée - Oueame BERRIANEHajar Elattari100% (1)
- BTS - Synthèse de Documents - Exemple de Tableau de ConfrontationDocument1 pageBTS - Synthèse de Documents - Exemple de Tableau de ConfrontationPrasa GnanarajanNo ratings yet
- L'utilisation Clinique Des Minis VisDocument133 pagesL'utilisation Clinique Des Minis VisAmira MansourkhodjaNo ratings yet
- Polycope or Anisation Gestion Projet PDFDocument97 pagesPolycope or Anisation Gestion Projet PDFجمال بوغلام اللهNo ratings yet
- Calcul Vérin Et DistribDocument2 pagesCalcul Vérin Et DistribdolokhovNo ratings yet
- Etude Amdec Du Pont Roulant: Présenté en Vue de L'obtention Du Diplôme de LicenceDocument42 pagesEtude Amdec Du Pont Roulant: Présenté en Vue de L'obtention Du Diplôme de Licenceamzal boudjmaamoundherNo ratings yet
- Metrologiethermique PDFDocument112 pagesMetrologiethermique PDFImen HammoudaNo ratings yet
- Meramria WafaDocument144 pagesMeramria WafahamdaNo ratings yet
- Universite D'Antananarivo: Departement Bâtiment Et Travaux PublicsDocument284 pagesUniversite D'Antananarivo: Departement Bâtiment Et Travaux PublicsIlias ElmaaloumNo ratings yet
- Sujet:: Train D'atterrissageDocument46 pagesSujet:: Train D'atterrissageygNo ratings yet
- Acoustique Des VéhiculesDocument4 pagesAcoustique Des Véhiculeslifefoot6No ratings yet
- CFL01 - Introduction À L'utilisation Du Logiciel FluidSIM - Pneumatique Et ÉlectropneumatiqueDocument17 pagesCFL01 - Introduction À L'utilisation Du Logiciel FluidSIM - Pneumatique Et ÉlectropneumatiqueYassine Azougagh0% (1)
- Etude Et Concéption D'un Moule À Injéction Plastique Pour Roue Dentée (Pignon)Document91 pagesEtude Et Concéption D'un Moule À Injéction Plastique Pour Roue Dentée (Pignon)Youcef Mimouni100% (1)
- Aragui MaroueneDocument87 pagesAragui Marouenekhaled AmeniNo ratings yet
- FAS146fr - Mesure Électrique de La TempératureDocument168 pagesFAS146fr - Mesure Électrique de La TempératureoussamaNo ratings yet
- MTR 86 W32Document52 pagesMTR 86 W32Per Perso0% (1)
- Cours Lubrification VES4Document34 pagesCours Lubrification VES4Büyüleyici GözlerNo ratings yet
- Mini Projet SNCFTDocument32 pagesMini Projet SNCFTFédia El MabroukNo ratings yet
- MEC737 CoursDocument135 pagesMEC737 CoursZack MahmoudiNo ratings yet
- TP PC DmisDocument13 pagesTP PC Dmisboukottaya borheneNo ratings yet
- Cours Cao IiDocument61 pagesCours Cao IiO ZNo ratings yet
- Département de Génie Mécanique MÉMOIRE.Document110 pagesDépartement de Génie Mécanique MÉMOIRE.btkmouradNo ratings yet
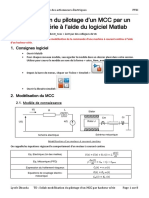
- TD Matlab MCC Hacheur SerieDocument8 pagesTD Matlab MCC Hacheur Seriedream techNo ratings yet
- Pfe Uas Souhail New1Document69 pagesPfe Uas Souhail New1saif eddine msiliniNo ratings yet
- Cahier de Charge Enetcom PlanneurDocument9 pagesCahier de Charge Enetcom PlanneurOussama AziziNo ratings yet
- Madeche MohamedDocument138 pagesMadeche MohamedmadaniNo ratings yet
- ManelDocument2 pagesManelCHaima GHzayel100% (1)
- MemotechDocument2 pagesMemotechSodNiNo ratings yet
- TP MFI Questions (20 21)Document2 pagesTP MFI Questions (20 21)Elyess Ben Ahmed100% (1)
- Rapport Jet D'eau 1Document7 pagesRapport Jet D'eau 1Mohammed Amine LabbardiNo ratings yet
- Tables Des Propriétés de Substances PuresDocument15 pagesTables Des Propriétés de Substances Puresleulmi mouhsenNo ratings yet
- Fic-IsBaeKG7Zt80ONkvJpTy4Wx2 AzMofY1qnhuXm5LHD3gES PDFDocument26 pagesFic-IsBaeKG7Zt80ONkvJpTy4Wx2 AzMofY1qnhuXm5LHD3gES PDFWael TriguiNo ratings yet
- Extrait 42367210Document116 pagesExtrait 42367210Marwan JBNo ratings yet
- Id 10726Document6 pagesId 10726Wided HechkelNo ratings yet
- Fluidsim PDFDocument190 pagesFluidsim PDFfoufoua100% (1)
- TP 1 Licence2 CoffeeDocument5 pagesTP 1 Licence2 CoffeeSayf BouyeddaNo ratings yet
- Catalogue 2016 E9.1 FR WebDocument277 pagesCatalogue 2016 E9.1 FR WebNicolas AguilarNo ratings yet
- Technologie Des Chaines de Production Et GPDocument94 pagesTechnologie Des Chaines de Production Et GPParc Elyes100% (2)
- Chapitre I - Généralités Sur L Automatisme Et Les Systèmes de Production IndustrielsDocument26 pagesChapitre I - Généralités Sur L Automatisme Et Les Systèmes de Production IndustrielsBonhomie MikobiNo ratings yet
- DS Thermodynamique Appliquée 2017Document2 pagesDS Thermodynamique Appliquée 2017Mayssem SouidNo ratings yet
- Brochure de TP Transferts de ChaleurDocument65 pagesBrochure de TP Transferts de ChaleurYà Dà0% (1)
- TP2 Vibration Mécanique AME MinishakerDocument14 pagesTP2 Vibration Mécanique AME MinishakerOmar BenadirNo ratings yet
- Memoire 171735082444 & 171735092115Document69 pagesMemoire 171735082444 & 171735092115Manal QuorsaneNo ratings yet
- Tp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManDocument5 pagesTp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManAmine RdNo ratings yet
- Pfe MecaniqueDocument5 pagesPfe MecaniqueAmira Warhéni100% (1)
- Gsde Cat General GuntDocument144 pagesGsde Cat General Guntoriginyoucef17No ratings yet
- Rapport FIRAS BAKLOUTIDocument31 pagesRapport FIRAS BAKLOUTIFatma BenbrahimNo ratings yet
- Receator 3d RapprtDocument30 pagesReceator 3d Rapprtsleepy esyesNo ratings yet
- Découverte Du Logiciel SolidWorksDocument9 pagesDécouverte Du Logiciel SolidWorksYassine Iferden TorssanovskiNo ratings yet
- Examen TribologieDocument10 pagesExamen TribologieHatem HamekNo ratings yet
- Compte Rendu TP 1Document8 pagesCompte Rendu TP 1Mohamed Ali MsaadiaNo ratings yet
- Fascicule de Travaux PratiquesDocument37 pagesFascicule de Travaux PratiquesAbdelhakim EbdelliNo ratings yet
- Rapport ACPDocument7 pagesRapport ACPReagan Busangu100% (1)
- Transmetteur RégulateurDocument89 pagesTransmetteur Régulateurabdel taibNo ratings yet
- Bougoffa Ramez Mohamed LamineDocument87 pagesBougoffa Ramez Mohamed LamineRodolphe SounouNo ratings yet
- Rapport PeugeotDocument39 pagesRapport PeugeotHãĐiR chetouiNo ratings yet
- Analyse Fonctionelle Cours Et ExoDocument12 pagesAnalyse Fonctionelle Cours Et ExoguesmiNo ratings yet
- Analyse Et Simulation de Refroidissement Des Aubes Dune Turbine A GazDocument74 pagesAnalyse Et Simulation de Refroidissement Des Aubes Dune Turbine A GazamelNo ratings yet
- TP Signal Gsi PDFDocument67 pagesTP Signal Gsi PDFDaha Ahmed100% (1)
- SujetDocument8 pagesSujetTaher NaamaNo ratings yet
- Présentation de Stage Technicien Chez Amec ExportDocument14 pagesPrésentation de Stage Technicien Chez Amec ExportMaher Garfa100% (1)
- Exercices de Dessin Technique Exercices of Engineering DrawingDocument32 pagesExercices de Dessin Technique Exercices of Engineering DrawingKamel FedaouiNo ratings yet
- 2008 Penu C PDFDocument200 pages2008 Penu C PDFKamel FedaouiNo ratings yet
- ExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesDocument77 pagesExercicesofRigidbodiesmechanics ExercicesdemcaniquedesolidesrigidesTàHa SamihNo ratings yet
- Traveaux Pratiques RDMDocument48 pagesTraveaux Pratiques RDMMehdi BlinkNo ratings yet
- MMCDocument141 pagesMMCMohamed LaliouiNo ratings yet
- RDM Compression CoursDocument1 pageRDM Compression CoursKamel FedaouiNo ratings yet
- 5514 Ressources Usinage Par Enlevement de Matiere PDFDocument8 pages5514 Ressources Usinage Par Enlevement de Matiere PDFMohamedAyoubNo ratings yet
- Dzexams 3ap Francais t3 20181 158343Document2 pagesDzexams 3ap Francais t3 20181 158343Kamel FedaouiNo ratings yet
- Pedagogie Participative en Ecole DingenieurDocument26 pagesPedagogie Participative en Ecole DingenieurKamel FedaouiNo ratings yet
- TD MK01 13 14Document22 pagesTD MK01 13 14ayman kaTanaNo ratings yet
- RuptDocument61 pagesRuptRimas InconueNo ratings yet
- 49 4 PDFDocument8 pages49 4 PDFKamel FedaouiNo ratings yet
- CT G12.63 71Document9 pagesCT G12.63 71Vudh Vi'No ratings yet
- Thermo0 PDFDocument1 pageThermo0 PDFKamel FedaouiNo ratings yet
- Chap3 3 PDFDocument26 pagesChap3 3 PDFKamel FedaouiNo ratings yet
- 4proportions PDFDocument2 pages4proportions PDFKamel FedaouiNo ratings yet
- SodureDocument25 pagesSodureriadhmezghaniNo ratings yet
- Defaut de SoudageDocument20 pagesDefaut de Soudagelaz_kNo ratings yet
- Chap11 1Document18 pagesChap11 1Zakia FalNo ratings yet
- BiomecDocument19 pagesBiomecKamel Fedaoui0% (1)
- 3 BasesDocument8 pages3 BasesKamel FedaouiNo ratings yet
- E151r2 Soudage ArmaturesDocument8 pagesE151r2 Soudage ArmaturesKamel FedaouiNo ratings yet
- Contra in TeDocument57 pagesContra in TeKamel FedaouiNo ratings yet
- Chap 4 CalDocument97 pagesChap 4 CalKamel FedaouiNo ratings yet
- Cours Thermique L2Document39 pagesCours Thermique L2Kamel FedaouiNo ratings yet
- Tpcourscc2 Cor 0910Document2 pagesTpcourscc2 Cor 0910Nacir DaikhNo ratings yet
- Smodin Plagiarism ReportDocument3 pagesSmodin Plagiarism Reportrajhi houssemNo ratings yet
- Examen 2021Document5 pagesExamen 2021Camelea AlxNo ratings yet
- Projection Du Secteur RéelDocument24 pagesProjection Du Secteur RéelAbdoulaye NdongNo ratings yet
- 8 Réalisation Des Activités OpérationnellesDocument33 pages8 Réalisation Des Activités OpérationnellesKarim DjeffalNo ratings yet
- El Watan Du 21.07.2013Document22 pagesEl Watan Du 21.07.2013nacer_2No ratings yet
- P - Etude6 - Les LiaisonsDocument4 pagesP - Etude6 - Les LiaisonsSamsun GalaxNo ratings yet
- 2001 Sept PT1Document19 pages2001 Sept PT1HamydNo ratings yet
- TD Compresseur e PDFDocument8 pagesTD Compresseur e PDFntab100% (1)
- Khedmtii 3Document6 pagesKhedmtii 3nadjmob3No ratings yet
- Chap 1 GéolocalisationDocument13 pagesChap 1 GéolocalisationGabin Kenny de Manuel TRIGONo ratings yet
- Teyliom Group RecruteDocument1 pageTeyliom Group RecruteHassane AmadouNo ratings yet
- L'innovation Dans L'événementiel SportifDocument5 pagesL'innovation Dans L'événementiel SportifhealthcareexpooNo ratings yet
- 322 05232011Document32 pages322 05232011elmoudjahid_dzNo ratings yet
- MEAG MDDX 66499 13 FR 1509Document300 pagesMEAG MDDX 66499 13 FR 1509xbruneauNo ratings yet
- Charpente MétaliqueDocument9 pagesCharpente MétaliqueH-a HichemNo ratings yet
- A Quoi Servent Les Fleurs CorrectionDocument3 pagesA Quoi Servent Les Fleurs Correctionapi-257663744No ratings yet
- Pompes Flygtk NDocument16 pagesPompes Flygtk NSamir PosibleNo ratings yet
- Rapport - Raphael PION - ALCASAR V3Document39 pagesRapport - Raphael PION - ALCASAR V3Ghofrane FerchichiNo ratings yet
- 5 - Business ModeleDocument5 pages5 - Business ModeleBassma AzarhounNo ratings yet
- FD 13-4Document11 pagesFD 13-4olympioNo ratings yet
- AL-prétirés DDMDocument14 pagesAL-prétirés DDMGiacomo AngeliniNo ratings yet
- ECVO LimitéDocument14 pagesECVO LimitéBOUILLEAUNo ratings yet
- Champions of Hara Doc FRDocument18 pagesChampions of Hara Doc FRRik ShuratoNo ratings yet
- Imagerie Des Fractures Du RocherDocument9 pagesImagerie Des Fractures Du RocherOussama AbounasrNo ratings yet
- Matlab Octave Cours JDBonjour 2016 09 26 PDFDocument181 pagesMatlab Octave Cours JDBonjour 2016 09 26 PDFAlemNo ratings yet
- CGL 2016 Anglais Rapport de JuryDocument5 pagesCGL 2016 Anglais Rapport de JurySaeclusNo ratings yet