You might also like
- Informacion LOGICA CABLEADA PDFDocument62 pagesInformacion LOGICA CABLEADA PDFJean Paul Soto VeraNo ratings yet
- Tesis en Sintemas de AutomatizacionDocument1 pageTesis en Sintemas de AutomatizacionDiego Emmanuel RestrepoNo ratings yet
- 1n4736at DDocument9 pages1n4736at DDiego Emmanuel RestrepoNo ratings yet
- The Thind CeojfnzDocument1 pageThe Thind CeojfnzDiego Emmanuel RestrepoNo ratings yet
- Nadie Pica Piedra Como Pedro PicapiedraDocument1 pageNadie Pica Piedra Como Pedro PicapiedraDiego Emmanuel RestrepoNo ratings yet
- Flujo eléctrico y campo eléctrico en distribuciones de carga simétricasDocument7 pagesFlujo eléctrico y campo eléctrico en distribuciones de carga simétricascarlos_0291No ratings yet
- Esquema Bomba 4 Palas Excéntrica - CiriDocument9 pagesEsquema Bomba 4 Palas Excéntrica - CiriAngel CastilloNo ratings yet
- TierraDocument1 pageTierraDiego Emmanuel RestrepoNo ratings yet
- Tercer Taller MaterialesDocument17 pagesTercer Taller MaterialesDiego Emmanuel RestrepoNo ratings yet
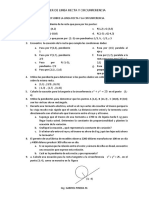
- 6.1 Taller Sobre La Linea Recta y La CircunferenciaDocument2 pages6.1 Taller Sobre La Linea Recta y La CircunferenciaDiego Emmanuel Restrepo100% (1)
- Conic AsDocument30 pagesConic AscatursalNo ratings yet
- 410191-Texto Del Artículo-1420751-1-10-20200406 ROBOTICADocument30 pages410191-Texto Del Artículo-1420751-1-10-20200406 ROBOTICAadriana cuevasNo ratings yet
- SINU-151 - Entregable-Informatica01 (1) TareaDocument2 pagesSINU-151 - Entregable-Informatica01 (1) TareafadoxNo ratings yet
- Extensor Inalámbrico Wifi A Vídeo VGA HD Alta Definición 720p Con Audio Wireless Presentation SystemDocument5 pagesExtensor Inalámbrico Wifi A Vídeo VGA HD Alta Definición 720p Con Audio Wireless Presentation SystemArmado DiazNo ratings yet
- Proyecto Paginas SecundariaDocument35 pagesProyecto Paginas SecundariaCristhianAlexMezaChonilloNo ratings yet
- Guía de Aprendizaje - 1er Parcial2021a - Páginas WebDocument60 pagesGuía de Aprendizaje - 1er Parcial2021a - Páginas WebIsaias DelgadoNo ratings yet
- Plan Anual de Computacion Segundo GradoDocument19 pagesPlan Anual de Computacion Segundo GradoDios ES LoveNo ratings yet
- INFOGRAFÍADocument3 pagesINFOGRAFÍAjesusNo ratings yet
- Ldnio MobicellDocument9 pagesLdnio Mobicelljhonna molinaNo ratings yet
- ALEXA2Document10 pagesALEXA2DANIEL PEREZ MEDEIRONo ratings yet
- Hud Jivaro GRDocument8 pagesHud Jivaro GRFEDERICO GAMERNo ratings yet
- Manual Programacion Java Tutor SwingDocument463 pagesManual Programacion Java Tutor SwingDaniela GarcíaNo ratings yet
- 6.3.3.8 Packet Tracer - Inter-VLAN Routing ChallengeDocument2 pages6.3.3.8 Packet Tracer - Inter-VLAN Routing ChallengeBrandon Sneider Garcia AriasNo ratings yet
- Spsu 835 MaterialDocument155 pagesSpsu 835 MaterialMary AmasifuenNo ratings yet
- P-P5-MR Matriz de RiesgosDocument4 pagesP-P5-MR Matriz de RiesgosArnNo ratings yet
- Guía de la tabla de particiones GUID (GPTDocument28 pagesGuía de la tabla de particiones GUID (GPTjavierrincon800No ratings yet
- Cliente Servidor: FTP Implementado en FilezillaDocument6 pagesCliente Servidor: FTP Implementado en Filezillakatheryn_21No ratings yet
- Lenguajes de Programación, Herramientas Case y Creadores WebDocument8 pagesLenguajes de Programación, Herramientas Case y Creadores WebJoe JuncoNo ratings yet
- Act 3 Control DigitalDocument3 pagesAct 3 Control DigitalJose MiguelNo ratings yet
- Cableado estructurado y topologías de redDocument13 pagesCableado estructurado y topologías de redandres daniel padron guzmanNo ratings yet
- Ciclo de vida de ActivityDocument3 pagesCiclo de vida de ActivityRaúl Antelo JuradoNo ratings yet
- Implementacion de Un Sistema para Interpretación de Imagenes Medicas en Los HospitalesDocument60 pagesImplementacion de Un Sistema para Interpretación de Imagenes Medicas en Los HospitalesChory_JMNo ratings yet
- IEEE VersionesDocument1 pageIEEE VersionesGabriela OlivasNo ratings yet
- Recuento de Datos - ReynagaDocument12 pagesRecuento de Datos - ReynagaChristopher MataNo ratings yet
- Base de datos en farmacias aumenta eficienciaDocument12 pagesBase de datos en farmacias aumenta eficienciaJean OgandoNo ratings yet
- Auditoria BD - FINALDocument25 pagesAuditoria BD - FINALJOSE LUIS DE LA CRUZ BLANCASNo ratings yet
- Personalización Del BlogDocument36 pagesPersonalización Del BlogLaura HernándezNo ratings yet
- Ordenador Práctico 1-Windows 10Document32 pagesOrdenador Práctico 1-Windows 10Cruz obama martínezNo ratings yet
- Trabajo de TecnologiaDocument3 pagesTrabajo de TecnologiaIsabella Henao FNo ratings yet
- MP 311 PDFDocument398 pagesMP 311 PDFMONICANo ratings yet
- Módulo telefónico para ascensores MMK-643Document2 pagesMódulo telefónico para ascensores MMK-643rubori3ascensoresNo ratings yet