You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Rosco RMT Asphalt Distributor PDFDocument192 pagesRosco RMT Asphalt Distributor PDFEdmore MukotsanjeraNo ratings yet
- Rosco RMT Asphalt Distributor PDFDocument192 pagesRosco RMT Asphalt Distributor PDFEdmore MukotsanjeraNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- HomeSkills Landscaping How To Use Plants, Structures & Surfaces To Transform Your YardDocument131 pagesHomeSkills Landscaping How To Use Plants, Structures & Surfaces To Transform Your YardAhmad Jamal Darus100% (5)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- SurveyingDocument58 pagesSurveyingapi-380281080% (5)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Dcc20063 - Engineering Survey Fieldwork Report 1: Levelling: Table of ContentDocument15 pagesDcc20063 - Engineering Survey Fieldwork Report 1: Levelling: Table of Contentwawa100% (1)
- Black & Decker The Book of Home How-To (Reduced)Document2,124 pagesBlack & Decker The Book of Home How-To (Reduced)azurehhh50% (2)
- Pipelay Survey, Positioning and As-Built Reportings For Offshore PipelinesDocument35 pagesPipelay Survey, Positioning and As-Built Reportings For Offshore PipelinesJacob PhilipNo ratings yet
- Operation Manual: Car Mp5 Player With 7 Inch HD Display Panel FM Radio Receiver BT MirrorlinkDocument18 pagesOperation Manual: Car Mp5 Player With 7 Inch HD Display Panel FM Radio Receiver BT MirrorlinkEdmore Mukotsanjera0% (1)
- Operation Manual: Car Mp5 Player With 7 Inch HD Display Panel FM Radio Receiver BT MirrorlinkDocument18 pagesOperation Manual: Car Mp5 Player With 7 Inch HD Display Panel FM Radio Receiver BT MirrorlinkEdmore Mukotsanjera0% (1)
- Guno, Lea H. 40 Problems - Surveying & TranspoDocument8 pagesGuno, Lea H. 40 Problems - Surveying & TranspoLea GunoNo ratings yet
- Sewer Reticulation Boq Preliminary and General Item Description of Work QTY Unit Rate Amount $ $Document10 pagesSewer Reticulation Boq Preliminary and General Item Description of Work QTY Unit Rate Amount $ $Edmore Mukotsanjera100% (1)
- Ce120-Project For Module 2 - Problem Set With SolutionDocument11 pagesCe120-Project For Module 2 - Problem Set With SolutionThortheGreayNo ratings yet
- Free Board Calculation of DamsDocument13 pagesFree Board Calculation of Damsinba123483% (6)
- Free Board Calculation of DamsDocument13 pagesFree Board Calculation of Damsinba123483% (6)
- Precise Leveling Settlement Monitoring CMA TowerDocument2 pagesPrecise Leveling Settlement Monitoring CMA Towerahmed_raza_khan100% (2)
- Virtual Media and Field Visit Practice Session 1 Modern Surveying - 20Ce32PDocument8 pagesVirtual Media and Field Visit Practice Session 1 Modern Surveying - 20Ce32Pshashi kumarNo ratings yet
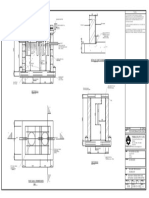
- 3108-C-103 GREASE TRAP-Layout1Document1 page3108-C-103 GREASE TRAP-Layout1Edmore MukotsanjeraNo ratings yet
- Chip Seal Best Practices and New IdeasDocument136 pagesChip Seal Best Practices and New IdeasEdmore MukotsanjeraNo ratings yet
- 3d For Discussion-ModelDocument1 page3d For Discussion-ModelEdmore MukotsanjeraNo ratings yet
- Final GP2 Copy-Model PDFDocument1 pageFinal GP2 Copy-Model PDFEdmore MukotsanjeraNo ratings yet
- The Firearms Act.Document23 pagesThe Firearms Act.Edmore MukotsanjeraNo ratings yet
- Aberfoyle Lodge Zimbabwean Local Rates 2019 Direct Bookings PDFDocument5 pagesAberfoyle Lodge Zimbabwean Local Rates 2019 Direct Bookings PDFEdmore MukotsanjeraNo ratings yet
- Aberfoyle Lodge Zimbabwean Local Rates 2019 Direct Bookings PDFDocument5 pagesAberfoyle Lodge Zimbabwean Local Rates 2019 Direct Bookings PDFEdmore MukotsanjeraNo ratings yet
- Prof Awad S. HannaDocument27 pagesProf Awad S. Hanna1Bnesa3No ratings yet
- 2020 Calendar Streamlined Colored With Holidays Portrait en ZWDocument1 page2020 Calendar Streamlined Colored With Holidays Portrait en ZWEdmore MukotsanjeraNo ratings yet
- Esia Ex Summary of Medupi Coal Power Plant July 1 Revised Final-Ram-1Document23 pagesEsia Ex Summary of Medupi Coal Power Plant July 1 Revised Final-Ram-1Edmore MukotsanjeraNo ratings yet
- 2019 Activity Price List Usd PDFDocument1 page2019 Activity Price List Usd PDFEdmore MukotsanjeraNo ratings yet
- Appendix D2 Engineering Report PDFDocument19 pagesAppendix D2 Engineering Report PDFEdmore MukotsanjeraNo ratings yet
- A Brief Comparison of Geotechnical Soil Classification Standars PDFDocument4 pagesA Brief Comparison of Geotechnical Soil Classification Standars PDFJorge Luis Moscoso ZarcilloNo ratings yet
- Impulsion SuperTech Brochure PDFDocument2 pagesImpulsion SuperTech Brochure PDFEdmore MukotsanjeraNo ratings yet
- ZINWA Integrated Report 2017 PDFDocument78 pagesZINWA Integrated Report 2017 PDFEdmore MukotsanjeraNo ratings yet
- Ijerph 15 00886 v2 PDFDocument22 pagesIjerph 15 00886 v2 PDFEdmore MukotsanjeraNo ratings yet
- 00 IntroDocument254 pages00 IntroTatenda MadzingiraNo ratings yet
- Liu GeoEng PDFDocument13 pagesLiu GeoEng PDFEdmore MukotsanjeraNo ratings yet
- Ijerph 15 00886 v2 PDFDocument22 pagesIjerph 15 00886 v2 PDFEdmore MukotsanjeraNo ratings yet
- Esia Ex Summary of Medupi Coal Power Plant July 1 Revised Final-Ram-1Document23 pagesEsia Ex Summary of Medupi Coal Power Plant July 1 Revised Final-Ram-1Edmore MukotsanjeraNo ratings yet
- Tailings Storage Facility Conceptual ClosureDocument32 pagesTailings Storage Facility Conceptual ClosureEdmore MukotsanjeraNo ratings yet
- Design of Anaerobic Digestion Tank A Sus PDFDocument5 pagesDesign of Anaerobic Digestion Tank A Sus PDFEdmore MukotsanjeraNo ratings yet
- Guardian Dogs WebDocument137 pagesGuardian Dogs Webvicente_ortiz_007No ratings yet
- IMN Installation ManualDocument136 pagesIMN Installation Manualivan.liepalNo ratings yet
- Total StationDocument15 pagesTotal StationDream zone EngineeringNo ratings yet
- Dumpy Level Survey ProjectDocument4 pagesDumpy Level Survey ProjectYash Khanderao100% (1)
- ANY DIFFERENCES BETWEEN SIMULATOR AND SIMULATED TRAINING SOFTWAREDocument2 pagesANY DIFFERENCES BETWEEN SIMULATOR AND SIMULATED TRAINING SOFTWAREfaesouNo ratings yet
- Z29 Remote Classification Surveys Z29Document10 pagesZ29 Remote Classification Surveys Z29Costel UngureanuNo ratings yet
- Surveying PDFDocument1 pageSurveying PDFMariam KariamNo ratings yet
- Laboratory Manual in Surveying 1 Fieldwork No. 1: Pacing LEARNING OUTCOMES: After Completion The Fieldwork Activity The Students Are Expected ToDocument5 pagesLaboratory Manual in Surveying 1 Fieldwork No. 1: Pacing LEARNING OUTCOMES: After Completion The Fieldwork Activity The Students Are Expected ToViktor Mikhael Roch BarbaNo ratings yet
- Advanced Directional Drilling Trajectory ModellingDocument133 pagesAdvanced Directional Drilling Trajectory ModellingAlexandru CroitoruNo ratings yet
- Guide Real Property Description Site LocationDocument30 pagesGuide Real Property Description Site LocationRamil BillonesNo ratings yet
- Local Media52263164502265743Document8 pagesLocal Media52263164502265743Venus Kate GevaNo ratings yet
- Geodetic Engineer's Report On Relocation SurveyDocument5 pagesGeodetic Engineer's Report On Relocation SurveyMalson GutierrezNo ratings yet
- Topographic Map of BelfallsDocument1 pageTopographic Map of BelfallsHistoricalMapsNo ratings yet
- TNSCB Assistant Engineers Recruitment 2016 Detailed Syllabus SurveyingDocument5 pagesTNSCB Assistant Engineers Recruitment 2016 Detailed Syllabus Surveyingg.rajaNo ratings yet
- Introduction To HighwayDocument33 pagesIntroduction To HighwayLuisito RiveroNo ratings yet
- Proposed Topographic Survey of Panal River at TaysanDocument15 pagesProposed Topographic Survey of Panal River at TaysanRhea CelzoNo ratings yet
- Unit Exam 5FINALDocument8 pagesUnit Exam 5FINALRose AstoNo ratings yet
- Surface Site Characterization For On-Site Septic SystemsDocument4 pagesSurface Site Characterization For On-Site Septic SystemsJhony CotaNo ratings yet
- Fundamentals of Surveying Course PortfolioDocument4 pagesFundamentals of Surveying Course PortfolioSHEAN GAYLE ANGNo ratings yet
- I I I Semester CivilDocument28 pagesI I I Semester CivilYogendra KushwahaNo ratings yet
- MMU/Ambala B.Arch Surveying & Mapping CourseDocument2 pagesMMU/Ambala B.Arch Surveying & Mapping CourseNagpal ChetanNo ratings yet
- 3.3 Onshore-Offshore Equipment TablesDocument3 pages3.3 Onshore-Offshore Equipment TablesGilbert NdibeNo ratings yet