You might also like
- Linear or LDO Regulators & Step-Down Switching RegulatorsDocument2 pagesLinear or LDO Regulators & Step-Down Switching Regulatorskasim leeNo ratings yet
- 2011.08.24 - RTP - Epe2011Document19 pages2011.08.24 - RTP - Epe2011Rodrigo Teixeira PintoNo ratings yet
- DTC P1760: Linear Solenoid For Line Pressure Control Circuit Malfunction (Shift Solenoid Valve SLT) Circuit DescriptionDocument3 pagesDTC P1760: Linear Solenoid For Line Pressure Control Circuit Malfunction (Shift Solenoid Valve SLT) Circuit DescriptionhitecNo ratings yet
- PID Control ExplainedDocument29 pagesPID Control Explainedsrikanthislavatu7615No ratings yet
- Synchronous Rectification National Power Designer 112Document8 pagesSynchronous Rectification National Power Designer 112sivasankartikkuNo ratings yet
- Optical Fiber and Ethernet Network Diagram for Hydropower Plant Control SystemDocument1 pageOptical Fiber and Ethernet Network Diagram for Hydropower Plant Control SystemĐình ThếNo ratings yet
- ENGR 2305 Electric Circuits 1Document22 pagesENGR 2305 Electric Circuits 1ElaineNo ratings yet
- Pid CernDocument98 pagesPid CernsybaritzNo ratings yet
- S2000AFDocument11 pagesS2000AFPedro LuisNo ratings yet
- MEC 2009-Lecture 2 SwitchesDocument27 pagesMEC 2009-Lecture 2 SwitchesDennis BandaNo ratings yet
- PWM Control Circuits Data SheetDocument13 pagesPWM Control Circuits Data SheetSugeng HariadiNo ratings yet
- Hybrid IC IGBT Gate Driver + DC/DC Converter VLA500K-01RDocument6 pagesHybrid IC IGBT Gate Driver + DC/DC Converter VLA500K-01RdevchandarNo ratings yet
- Utc 2030Document14 pagesUtc 2030Jose M PeresNo ratings yet
- Jy 997 D 26101 BDocument208 pagesJy 997 D 26101 BAgha Ali KhanNo ratings yet
- Ista924 4858Document116 pagesIsta924 4858Anonymous pe2KxeAwNo ratings yet
- InTech-Fpga Implementation of Pid Controller For The Stabilization of A DC DC Buck ConverterDocument17 pagesInTech-Fpga Implementation of Pid Controller For The Stabilization of A DC DC Buck ConverterEni Indah PurwantiNo ratings yet
- High Step Up ConvertersDocument100 pagesHigh Step Up ConvertersRakesh SandarativjuNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document11 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Ganapati SteelNo ratings yet
- Digital PID Control Algorithm: Hesheng Wang Department of Automation, SJTU 2016,03Document17 pagesDigital PID Control Algorithm: Hesheng Wang Department of Automation, SJTU 2016,03tony riannNo ratings yet
- 1A Step-Down/Step-Up/Inverting DC-DC Converter Az34063DDocument14 pages1A Step-Down/Step-Up/Inverting DC-DC Converter Az34063Dbratu.eugen710No ratings yet
- Power Plant Monitoring Using Pic MicrocontrollerDocument35 pagesPower Plant Monitoring Using Pic Microcontrollerdhirajsingh_avitNo ratings yet
- s10 TR Tank Rupture TutorialDocument79 pagess10 TR Tank Rupture TutorialLyuNo ratings yet
- TENCONSpring 2013 6584454Document5 pagesTENCONSpring 2013 6584454Asad HameedNo ratings yet
- Contact Block EatonDocument2 pagesContact Block EatonsydifiaNo ratings yet
- Low Voltage Catalogue ProtectionDocument76 pagesLow Voltage Catalogue ProtectionŽeljko MoćanNo ratings yet
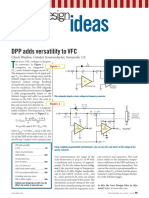
- VFC PDFDocument7 pagesVFC PDFtommy99No ratings yet
- Lecture 7: Control of a DC Motor DriveDocument25 pagesLecture 7: Control of a DC Motor DrivePoliConDrive0% (1)
- EC-Conventional Paper-II Key PointsDocument6 pagesEC-Conventional Paper-II Key PointsDIGITAL BUSINESSNo ratings yet
- Elektor Attiny NoiseDocument2 pagesElektor Attiny NoiseKlemensKohlweisNo ratings yet
- Buck - Converters For Portable ApplicationDocument70 pagesBuck - Converters For Portable ApplicationanandNo ratings yet
- Jy997d26101 ADocument206 pagesJy997d26101 AĐạtSkyNo ratings yet
- Otis Sigma SI210 PDFDocument345 pagesOtis Sigma SI210 PDFAnthony Rafaga Ortiz91% (11)
- SensorsTransducers S7 8 Group2 Checked PDFDocument36 pagesSensorsTransducers S7 8 Group2 Checked PDFHhmAitNo ratings yet
- Vacon Nxi Fi4-Fi8 User Manual: InvertersDocument97 pagesVacon Nxi Fi4-Fi8 User Manual: InvertersВалентин МазаевNo ratings yet
- Control iCT contactors remote guideDocument5 pagesControl iCT contactors remote guidebaguspermana7No ratings yet
- VN In: StartDocument5 pagesVN In: StartPrateek TripathiNo ratings yet
- Home-Constructed, Building Block Op-Amp Circuits For Analog Computers Inverting IntegratorDocument5 pagesHome-Constructed, Building Block Op-Amp Circuits For Analog Computers Inverting IntegratorMsuttonNo ratings yet
- Pulse-Width-Modulation Control Circuits Az7500EDocument13 pagesPulse-Width-Modulation Control Circuits Az7500EMy shop Cool100% (1)
- Data Sheet LM7807Document13 pagesData Sheet LM7807Sofyan Andika Yusuf100% (1)
- Module-3 (DC Chopper)Document76 pagesModule-3 (DC Chopper)Prasann KatiyarNo ratings yet
- Pulse-Width-Modulation Control Circuits Az7500FDocument13 pagesPulse-Width-Modulation Control Circuits Az7500FAkram KareemNo ratings yet
- Structure of Fast Power Diodes 49-53 - SemikronDocument7 pagesStructure of Fast Power Diodes 49-53 - SemikronPelotaDeTrapoNo ratings yet
- Eaton 048878 DILET11 30 A en - GBDocument6 pagesEaton 048878 DILET11 30 A en - GBTum BeginsNo ratings yet
- EE309 Notes 07 PDFDocument4 pagesEE309 Notes 07 PDFbals123456100% (1)
- Current Mode Pi ControllerDocument19 pagesCurrent Mode Pi ControllersunitaNo ratings yet
- Lecture #41: Active Devices: - This Week We Will Be Reviewing The Material Learned During The Course - Today: ReviewDocument28 pagesLecture #41: Active Devices: - This Week We Will Be Reviewing The Material Learned During The Course - Today: Reviewgosai_parasNo ratings yet
- ATA6836C: Hex Half-Bridge Driver With Serial Input ControlDocument21 pagesATA6836C: Hex Half-Bridge Driver With Serial Input ControlNgô Mạnh TiếnNo ratings yet
- Features General Description: High-Speed High-Side MOSFET DriverDocument9 pagesFeatures General Description: High-Speed High-Side MOSFET DriverPaulo SilvaNo ratings yet
- Aalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep MDocument7 pagesAalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep Mmarouan86No ratings yet
- 90W Smps For Monitors With Standby Function: AN1132 Application NoteDocument12 pages90W Smps For Monitors With Standby Function: AN1132 Application NoteGrzegorz WegnerNo ratings yet
- Impulse-OFF With Auxiliary Voltage, 1 C/o (SPDT) Contact: Electronic Timer CT-AWEDocument8 pagesImpulse-OFF With Auxiliary Voltage, 1 C/o (SPDT) Contact: Electronic Timer CT-AWEKelly chatNo ratings yet
- Consew CSM1000 Motor ControllerDocument3 pagesConsew CSM1000 Motor ControllerJose Eduardo Vargas AngaritaNo ratings yet
- Unisonic Technologies Co., LTD: Dual Full-Bridge PWM Motor DriverDocument9 pagesUnisonic Technologies Co., LTD: Dual Full-Bridge PWM Motor DriverSashika KumaraNo ratings yet
- Current Relays Under Current CSG140Document2 pagesCurrent Relays Under Current CSG140Abdul BasitNo ratings yet
- DC DC Boost ConverterDocument21 pagesDC DC Boost Converterrokbraihan2No ratings yet
- Design of Control Systems: Case StudiesDocument35 pagesDesign of Control Systems: Case StudiesRaf IsmailNo ratings yet
- Measurement of Time Period of A Simple Pendulum Using An Electronic CircuitDocument12 pagesMeasurement of Time Period of A Simple Pendulum Using An Electronic CircuitSarifudin HusniNo ratings yet
- As Tromp IdDocument13 pagesAs Tromp IdcosmedamiaoNo ratings yet
- SEPICDocument11 pagesSEPICKarla BeatrizNo ratings yet
- Learn Bass Scales in All 12 KeysDocument19 pagesLearn Bass Scales in All 12 KeysMlr7100% (1)
- WaterFilterDesign FinalDocument38 pagesWaterFilterDesign FinalKevin RussellNo ratings yet
- DisclaimerDocument1 pageDisclaimerKevin RussellNo ratings yet
- NASA Fastener Design ManualDocument100 pagesNASA Fastener Design ManualAaron D. MillerNo ratings yet
- Energy Harvesting BearingsDocument108 pagesEnergy Harvesting BearingsKevin RussellNo ratings yet
- MRC Bearing CatalogDocument404 pagesMRC Bearing CatalogRajagopal100% (3)
- FiberglassDesignManual PDFDocument75 pagesFiberglassDesignManual PDFKevin RussellNo ratings yet
- ActuatorControl LimitsSaturationSlew PDFDocument61 pagesActuatorControl LimitsSaturationSlew PDFKevin RussellNo ratings yet
- Fusion Chain Reaction: by M. GryziñskiDocument5 pagesFusion Chain Reaction: by M. GryziñskiKevin RussellNo ratings yet
- Review of Nuclear Aerospace ApplicationsDocument21 pagesReview of Nuclear Aerospace ApplicationsKevin RussellNo ratings yet
- Hypersonic Thermal ManagmentDocument5 pagesHypersonic Thermal ManagmentKevin RussellNo ratings yet
- Status of Turbulence Modeling For High-Speed Propulsion Flow ProblemsDocument57 pagesStatus of Turbulence Modeling For High-Speed Propulsion Flow ProblemsKevin RussellNo ratings yet
- DS-500 Series Weighing ScaleDocument1 pageDS-500 Series Weighing ScaleAntmavrNo ratings yet
- PreAssessment Quadratic Unit Multiple ChoiceDocument13 pagesPreAssessment Quadratic Unit Multiple ChoiceJoby ChenNo ratings yet
- Stolle Triton Cupping System ManualDocument118 pagesStolle Triton Cupping System ManualMarcelo BarrosNo ratings yet
- Precast Bridge DeckDocument4 pagesPrecast Bridge DeckPaul_delgadoNo ratings yet
- "Explain With Example That Rate of Convergence of False Position Method Is Faster Than That of The Bisection Method.Document3 pages"Explain With Example That Rate of Convergence of False Position Method Is Faster Than That of The Bisection Method.gauravsanadhyaNo ratings yet
- Design and Optimization of Runner and Gating Systems For Permanent Mould CastingDocument7 pagesDesign and Optimization of Runner and Gating Systems For Permanent Mould CastingJulie TremblayNo ratings yet
- Tartarus Magistery Manfred JuniusDocument10 pagesTartarus Magistery Manfred JuniusJanWillNo ratings yet
- The Bearing Capacity of Footings On Coarse SoilsDocument11 pagesThe Bearing Capacity of Footings On Coarse SoilsMattNo ratings yet
- Chapter 24 - Electric PotentialDocument12 pagesChapter 24 - Electric PotentialVV CepheiNo ratings yet
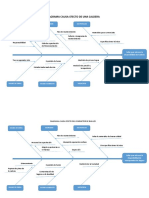
- Caldera causa-efecto diagrama mantenimiento fallasDocument2 pagesCaldera causa-efecto diagrama mantenimiento fallasDaniel Will Morales GuerreroNo ratings yet
- Mae 5130: Viscous Flows: Lecture 3: Kinematic PropertiesDocument23 pagesMae 5130: Viscous Flows: Lecture 3: Kinematic Propertiesriteish singhNo ratings yet
- Determination of The Surface Tension of Liquid Stainless SteelDocument5 pagesDetermination of The Surface Tension of Liquid Stainless SteelĐào ThườngNo ratings yet
- ME8501 Metrology and Measurements PDFDocument93 pagesME8501 Metrology and Measurements PDFpuneetNo ratings yet
- Design of New Biomedical Titanium Alloy Based On D-Electron Alloy Design Theory and JMatPro SoftwareDocument6 pagesDesign of New Biomedical Titanium Alloy Based On D-Electron Alloy Design Theory and JMatPro SoftwareAbraão Santos SilvaNo ratings yet
- Engineering Design Guideline - Measurement Rev02webDocument16 pagesEngineering Design Guideline - Measurement Rev02weblutfi awn0% (1)
- Weldox 1100 Structural SteelDocument2 pagesWeldox 1100 Structural SteelAndrewFranciscoNo ratings yet
- Software Design Theory and Railroad Application of Simple Drapery SystemDocument14 pagesSoftware Design Theory and Railroad Application of Simple Drapery SystemoscargilgNo ratings yet
- Transportation Engineering Lab ManualDocument42 pagesTransportation Engineering Lab ManualSubzar BhatNo ratings yet
- Matrix Acidizing Course PDFDocument74 pagesMatrix Acidizing Course PDFBehzad Hosseinzadeh100% (1)
- AS (GCE) Instant Revision of ChemistryDocument130 pagesAS (GCE) Instant Revision of ChemistryOlivia Panterka Vainilla100% (4)
- Calibration Report For Eurocode 1 On Wind ActionsDocument4 pagesCalibration Report For Eurocode 1 On Wind ActionsIssa Kazeem KolawoleNo ratings yet
- Interpretation CPTDocument5 pagesInterpretation CPTNadeem AbbasiNo ratings yet
- Kraiburg Comfort Mat Type KEW Plus: DLG-Test Report 5830 FDocument4 pagesKraiburg Comfort Mat Type KEW Plus: DLG-Test Report 5830 Fcanito73No ratings yet
- COT Science 6 Q3 DLP-simple Machine - PPTX Version 1Document75 pagesCOT Science 6 Q3 DLP-simple Machine - PPTX Version 1Bryan Bangiban83% (18)
- Magnetic Field and Magnetic Effects of Current: Assignment 2Document2 pagesMagnetic Field and Magnetic Effects of Current: Assignment 2HaRryNo ratings yet
- Supersonic Flow Over A Wedge (Oblique Shock Problem)Document29 pagesSupersonic Flow Over A Wedge (Oblique Shock Problem)sameer100% (2)
- Analytical Techniques Julia C. Drees Alan H. B. WuDocument36 pagesAnalytical Techniques Julia C. Drees Alan H. B. WuBetrearon SileshiNo ratings yet
- Is - 807Document47 pagesIs - 807Mohit Arora0% (1)
- Microphone Calibration by Transfer Function Comparison MethodDocument5 pagesMicrophone Calibration by Transfer Function Comparison MethodJulian A. TinaoNo ratings yet
- Flexural STrength of Beam ASTM C78Document5 pagesFlexural STrength of Beam ASTM C78Bunkun15No ratings yet