You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- SQL Server Hardware EbookDocument329 pagesSQL Server Hardware Ebookpimane100% (1)
- Competency Standards Electrician Level II IVDocument47 pagesCompetency Standards Electrician Level II IVSheela AliNo ratings yet
- Introduction of The ILS, VOR, DMEDocument43 pagesIntroduction of The ILS, VOR, DMEChiranjivi Kuthumi100% (1)
- List Mode Guide PDFDocument20 pagesList Mode Guide PDFsandeep yadavNo ratings yet
- Datasheet l6506dDocument8 pagesDatasheet l6506dSIELAB C.A.No ratings yet
- Package Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsDocument12 pagesPackage Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsHojas VientoNo ratings yet
- TC74HC04AP, TC74HC04AF: Hex InverterDocument8 pagesTC74HC04AP, TC74HC04AF: Hex InverterAnggi PambudiNo ratings yet
- TC74HC175AP, TC74HC175AF, TC74HC175AFN: Quad D-Type Flip Flop With ClearDocument10 pagesTC74HC175AP, TC74HC175AF, TC74HC175AFN: Quad D-Type Flip Flop With ClearEngin UzunNo ratings yet
- Stepper Motor Driver: Powerdip 12 + 2 + 2Document8 pagesStepper Motor Driver: Powerdip 12 + 2 + 2Engin UzunNo ratings yet
- SDC7500 enDocument7 pagesSDC7500 enodelaineNo ratings yet
- TC74HC02AP, TC74HC02AF: Quad 2-Input NOR GateDocument7 pagesTC74HC02AP, TC74HC02AF: Quad 2-Input NOR GatejoseNo ratings yet
- DatasheetDocument3 pagesDatasheetVidal Tello lopezNo ratings yet
- KA7500BDocument8 pagesKA7500Bzdenko60No ratings yet
- SMPS Controller: Features DescriptionDocument8 pagesSMPS Controller: Features DescriptionVolodiyaNo ratings yet
- TC7SH04F Inverter ICDocument6 pagesTC7SH04F Inverter ICMario Rosas VargasNo ratings yet
- Data SheetDocument2 pagesData SheetCengiz ZorgörmezNo ratings yet
- 74LV08ADocument8 pages74LV08AEngin UzunNo ratings yet
- SMPS Controller: Features DescriptionDocument11 pagesSMPS Controller: Features DescriptionAdah BumboneNo ratings yet
- Bay Linear Current Mode PWM Controller SpecificationsDocument11 pagesBay Linear Current Mode PWM Controller SpecificationsShashikant PatilNo ratings yet
- Triple Schmitt Inverter: Order CodesDocument7 pagesTriple Schmitt Inverter: Order CodeselieNo ratings yet
- TC74HC4017AP Datasheet en 20140301Document9 pagesTC74HC4017AP Datasheet en 20140301Yann Van OsselaerNo ratings yet
- Unisonic Technologies Co., LTD: Single TimerDocument7 pagesUnisonic Technologies Co., LTD: Single TimerMarco BrupenNo ratings yet
- LB1910Document7 pagesLB1910samuelRODNo ratings yet
- TC74HC279AP, TC74HC279AF: Quad S - R LatchDocument8 pagesTC74HC279AP, TC74HC279AF: Quad S - R LatchBiblia em ÁudioNo ratings yet
- Unisonic Technologies Co., LTD: Single TimerDocument8 pagesUnisonic Technologies Co., LTD: Single TimerDevartha AncenNo ratings yet
- PWM Current Control Type Stepping Motor Driver: Monolithic Digital ICDocument15 pagesPWM Current Control Type Stepping Motor Driver: Monolithic Digital ICDriss BouyaNo ratings yet
- TC74HC174AP, TC74HC174AF, TC74HC174AFN: Hex D-Type Flip Flop With ClearDocument9 pagesTC74HC174AP, TC74HC174AF, TC74HC174AFN: Hex D-Type Flip Flop With ClearBruno CoutoNo ratings yet
- 74F14 Hex Inverter Schmitt Trigger: General DescriptionDocument5 pages74F14 Hex Inverter Schmitt Trigger: General DescriptionSun NartoNo ratings yet
- BD9848FV: 1 Should Be Deleted by 6.5mW/ at Ta 25 or More. When Mounted On A Glass Epoxy PCB of 70.0mm×70.0 mm×1.6 MMDocument7 pagesBD9848FV: 1 Should Be Deleted by 6.5mW/ at Ta 25 or More. When Mounted On A Glass Epoxy PCB of 70.0mm×70.0 mm×1.6 MMAmit BiswasNo ratings yet
- LB11923V TLM e 2492505Document20 pagesLB11923V TLM e 2492505TZM BucNo ratings yet
- AN6650 کنترل دور موتورDocument3 pagesAN6650 کنترل دور موتورJavad MohseniNo ratings yet
- Ka331 1010762Document9 pagesKa331 1010762RohiCheginiNo ratings yet
- Data Sheet BD 9270Document5 pagesData Sheet BD 9270senilsonNo ratings yet
- L4960 PDFDocument16 pagesL4960 PDFedgar_dauzonNo ratings yet
- 2A Quad Darlington Switch: DescriptionDocument7 pages2A Quad Darlington Switch: DescriptiontommyhghNo ratings yet
- Quad 2-Input Exclusive or GateDocument3 pagesQuad 2-Input Exclusive or Gategretch_montoya2583No ratings yet
- 74F14 Hex Inverter Schmitt Trigger: General DescriptionDocument4 pages74F14 Hex Inverter Schmitt Trigger: General DescriptionCarlos PosadaNo ratings yet
- DP8600C YwDocument9 pagesDP8600C YwSURESH CHANDRA ROUTNo ratings yet
- 74HC373D Datasheet en 20160804Document12 pages74HC373D Datasheet en 20160804Eletronica ReparNo ratings yet
- STK 6713 BMK 4Document10 pagesSTK 6713 BMK 4KST5No ratings yet
- LB1650Document6 pagesLB1650Aj PrasetiyoNo ratings yet
- C555 UnisonicTechnologiesDocument4 pagesC555 UnisonicTechnologieskaryadi sbyNo ratings yet
- 74LS14 PDFDocument4 pages74LS14 PDFIkbal IswandiNo ratings yet
- Hex Schmitt-Trigger Inverter SL74LS14Document4 pagesHex Schmitt-Trigger Inverter SL74LS14Ikbal IswandiNo ratings yet
- Hex Schmitt-Trigger Inverter: SL74LS14Document4 pagesHex Schmitt-Trigger Inverter: SL74LS14aadNo ratings yet
- TC74HC112APDocument10 pagesTC74HC112APsomtchekusNo ratings yet
- LM723 PDFDocument15 pagesLM723 PDFGANESH KUMAR B eee2018No ratings yet
- Datasheet LB1991V - 09Document7 pagesDatasheet LB1991V - 09RafliNo ratings yet
- 74HC00D 74HC00D 74HC00D 74HC00D: CMOS Digital Integrated Circuits Silicon MonolithicDocument8 pages74HC00D 74HC00D 74HC00D 74HC00D: CMOS Digital Integrated Circuits Silicon MonolithicAssistec TecNo ratings yet
- TSM103W: Dual Operational Amplifier and Voltage ReferenceDocument7 pagesTSM103W: Dual Operational Amplifier and Voltage Reference[INSERT MY NAME]No ratings yet
- Bidirectional Motor Driver: Monolithic Digital ICDocument5 pagesBidirectional Motor Driver: Monolithic Digital ICCinddy GarciaNo ratings yet
- Datasheet Power Factor CorrectorDocument11 pagesDatasheet Power Factor CorrectorSeptimo GuevaraNo ratings yet
- Ts 914Document17 pagesTs 914PedroNo ratings yet
- Multifunction Single-Phase Full-Wave Fan Motor Driver: DatasheetDocument32 pagesMultifunction Single-Phase Full-Wave Fan Motor Driver: DatasheetJuan MunozNo ratings yet
- Telefono l3240b Twotone RingerDocument6 pagesTelefono l3240b Twotone Ringerblackbeast79No ratings yet
- KA2410 DatasheetDocument6 pagesKA2410 Datasheetauyantepuy73No ratings yet
- TL 494Document9 pagesTL 494HaSophim100% (2)
- BD9270FDocument5 pagesBD9270FWercklein SanchezNo ratings yet
- 74VHC08 Quad 2-Input AND Gate DatasheetDocument9 pages74VHC08 Quad 2-Input AND Gate DatasheetSero StivNo ratings yet
- Digital Multimeter: Instruction ManualDocument1 pageDigital Multimeter: Instruction Manualphuong leNo ratings yet
- Introduction To Sensors and Actuators: S. Senthil RajaDocument38 pagesIntroduction To Sensors and Actuators: S. Senthil RajassrgmanNo ratings yet
- Pze X5 enDocument6 pagesPze X5 enosiel limaNo ratings yet
- Power System Automation PDFDocument42 pagesPower System Automation PDFyxp2237No ratings yet
- Analysis of Non-Salient Pole Synchronous Generator Using Phasor DiagramsDocument19 pagesAnalysis of Non-Salient Pole Synchronous Generator Using Phasor DiagramsNavitha RodriguesNo ratings yet
- Technical Data 33kV AIS VH3Document5 pagesTechnical Data 33kV AIS VH3mahi229No ratings yet
- All India Radio QuizDocument15 pagesAll India Radio QuizMamta100% (3)
- SP5050S - Manual - 200508 SIPDocument62 pagesSP5050S - Manual - 200508 SIPchino71No ratings yet
- DXCDocument3 pagesDXCmukesh21982No ratings yet
- 8KV 500mA Ultra Fast Recovery High Voltage DiodeDocument1 page8KV 500mA Ultra Fast Recovery High Voltage Diodeedilbertos_4No ratings yet
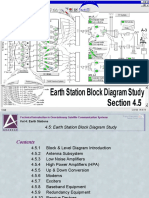
- Earth Station Block Diagram Study: Section 5Document213 pagesEarth Station Block Diagram Study: Section 5Extreme DaysNo ratings yet
- Chapter17 Corrosion&DegradationofMaterials PDFDocument84 pagesChapter17 Corrosion&DegradationofMaterials PDFAngelaNo ratings yet
- Embedded ProjectsDocument10 pagesEmbedded ProjectsMikroc Thupati Srinivs100% (1)
- DVB-S2 Communication Chain ProjectDocument15 pagesDVB-S2 Communication Chain ProjectHuongNguyenNo ratings yet
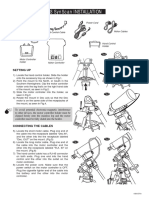
- EQ3 SynScan INSTALLATION guideDocument1 pageEQ3 SynScan INSTALLATION guideOscar MalamudNo ratings yet
- Converter 156/04: User S ManualDocument31 pagesConverter 156/04: User S ManualIlhami DemirNo ratings yet
- ELECTRONIC ENGINEERING LTD. Outdoor PIR ManualDocument18 pagesELECTRONIC ENGINEERING LTD. Outdoor PIR Manualtadeo.hdzNo ratings yet
- Experiment 3 (B) : Basics of OR Gate and Its Application in Industrial ControlDocument3 pagesExperiment 3 (B) : Basics of OR Gate and Its Application in Industrial ControlDivyanshu BoseNo ratings yet
- Aloha For ClassDocument23 pagesAloha For ClassetasureshNo ratings yet
- Vme Bus: Starter KitDocument2 pagesVme Bus: Starter Kitihab_abdullahNo ratings yet
- ProWORX32+V2 1+SP2+ReadMeEng PDFDocument12 pagesProWORX32+V2 1+SP2+ReadMeEng PDFRuben LoveraNo ratings yet
- Hot Rod III Deluxe and DeVille - Gamp - ManualDocument28 pagesHot Rod III Deluxe and DeVille - Gamp - Manuala personNo ratings yet
- SpaceLogic TC903 ThermostatDocument3 pagesSpaceLogic TC903 ThermostatIonut Viorel TudorNo ratings yet
- Shared Memory ArchitectureDocument39 pagesShared Memory Architectureอภิเษก หงษ์วิทยากรNo ratings yet
- AMTL 3HP DOL StarterDocument8 pagesAMTL 3HP DOL StarterAnonymous o8XgyS1No ratings yet
- Partial List of Our Testing EquipmentDocument1 pagePartial List of Our Testing EquipmentSubhransu MohapatraNo ratings yet