You might also like
- AC Motor ProtectionDocument33 pagesAC Motor ProtectionLoretta KimNo ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Motor Switching and ProtectionDocument30 pagesMotor Switching and ProtectionMohammedSaadaniHassani100% (1)
- Motor Protection Training CourseDocument439 pagesMotor Protection Training CourseAlireza Farsani100% (1)
- Motor Protection & CharacteristicsDocument16 pagesMotor Protection & CharacteristicsGoogool YNo ratings yet
- Motor ProtectionDocument41 pagesMotor Protectionrjphansalkar100% (3)
- Motor Protection Relay Setting GuideDocument175 pagesMotor Protection Relay Setting GuideThanigaivelan Govindhasamy100% (19)
- Motor Protection ManualDocument20 pagesMotor Protection ManualNirmal mehtaNo ratings yet
- 01 Introduction Motor ProtectionDocument22 pages01 Introduction Motor ProtectionAndrés Felipe LeonNo ratings yet
- BAGUS GE - NGT & Generator Protection CalculationDocument140 pagesBAGUS GE - NGT & Generator Protection CalculationVictor Hutahaean100% (1)
- Oc Relay IonDocument47 pagesOc Relay IonNaseer Hyden100% (10)
- Uttaranchal Power Corp. Ltd / Protection Settings CalculationsDocument70 pagesUttaranchal Power Corp. Ltd / Protection Settings Calculationssandeep_yadav100% (9)
- 1) Undervoltage Protections Set Too High: Motor Protection: Three Common Mistakes and How To Avoid ThemDocument11 pages1) Undervoltage Protections Set Too High: Motor Protection: Three Common Mistakes and How To Avoid ThemNaveen GuptaNo ratings yet
- Protection Handbook for EngineersDocument262 pagesProtection Handbook for EngineersAna Raquel Santos86% (22)
- Motor Protection - ABBDocument27 pagesMotor Protection - ABBMub MehNo ratings yet
- Handbook for Protection EngineersDocument127 pagesHandbook for Protection Engineersts45306No ratings yet
- The Setting List of Generator Protection Relay (CEBU-P1-20-V-220003)Document39 pagesThe Setting List of Generator Protection Relay (CEBU-P1-20-V-220003)Sugar RayNo ratings yet
- 10 Motor Protection 1Document51 pages10 Motor Protection 1billymcreal100% (1)
- Differential ProtectionDocument57 pagesDifferential ProtectionProsper Shumba100% (8)
- Starting - Large Motor Presentation MAR2016-Rev1Document101 pagesStarting - Large Motor Presentation MAR2016-Rev1royclhorNo ratings yet
- Relay Protection Coordination Study The Electricity ForumDocument6 pagesRelay Protection Coordination Study The Electricity ForumRAPRATSINNo ratings yet
- C9 A.C. Motor ProtectionDocument18 pagesC9 A.C. Motor ProtectionShailesh ChettyNo ratings yet
- Motor ProtectionDocument43 pagesMotor ProtectionewiveNo ratings yet
- Basics of ProtectionDocument183 pagesBasics of Protectionsushmitha100% (1)
- Ac Motor ProtectionDocument38 pagesAc Motor ProtectionsibtainNo ratings yet
- Overcurrent ProtectionDocument61 pagesOvercurrent Protectionalimaghami100% (2)
- Motor ProtectionDocument29 pagesMotor ProtectionSridhar N Nagarjan100% (4)
- Protection Engineering and Research Laboratories: Session VII: Transformer ProtectionDocument105 pagesProtection Engineering and Research Laboratories: Session VII: Transformer Protectionsupermannon100% (8)
- Co-Ordination of Over Current Relays in Distribution SystemDocument36 pagesCo-Ordination of Over Current Relays in Distribution SystemSiva P100% (1)
- Principles of Protection by AREVA. 2008Document792 pagesPrinciples of Protection by AREVA. 2008hicham boutouche100% (7)
- Generator ProtectionDocument30 pagesGenerator ProtectionShahzad Bhatti100% (2)
- HV Protection Relays Setting Calculation Rev-4Document58 pagesHV Protection Relays Setting Calculation Rev-4raza23993% (15)
- Calculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesDocument5 pagesCalculate IDMT Over Current Relay Setting (50 - 51) - Electrical Notes & ArticlesThức VõNo ratings yet
- Presented by Amilkanthwar P. A. Assistant Engineer (Gen)Document25 pagesPresented by Amilkanthwar P. A. Assistant Engineer (Gen)sadashivs100% (2)
- Generator ProtectionDocument36 pagesGenerator Protectionrohit_me083100% (2)
- Over Current & Earth Fault Setting CalculationsDocument33 pagesOver Current & Earth Fault Setting Calculationsyousaf_zai_khan81995100% (22)
- Advanced-Power-System-Protection-Webinar-Aug-2020Document4 pagesAdvanced-Power-System-Protection-Webinar-Aug-2020nooralhudNo ratings yet
- Manual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPDocument56 pagesManual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPMallikarjun Reddy92% (12)
- Gen Protn Philosophy&SettingsDocument52 pagesGen Protn Philosophy&SettingsArijit Majumdar100% (1)
- Generator Protection Settings CalculationsDocument112 pagesGenerator Protection Settings CalculationsPradeep_VashistNo ratings yet
- Motor AccelerationDocument41 pagesMotor AccelerationFrancisco Andrade100% (1)
- 1 GE Format Motor Protection - Single SessionDocument53 pages1 GE Format Motor Protection - Single SessionDileep GantaNo ratings yet
- Motor ProtectionDocument47 pagesMotor ProtectionKhaled RabeaNo ratings yet
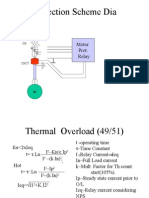
- Protection Scheme Dia: Motor Prot. RelayDocument9 pagesProtection Scheme Dia: Motor Prot. RelayPradipta Kumar MohantyNo ratings yet
- TYN 0516 - TYN 816: FeaturesDocument4 pagesTYN 0516 - TYN 816: FeaturesLuna Rebeca Mendoza AlonsoNo ratings yet
- 2 Motor Protection Alstom - No Iet LogoDocument72 pages2 Motor Protection Alstom - No Iet LogosayedmhNo ratings yet
- 1 Motor Protection Single SessionDocument27 pages1 Motor Protection Single Sessionmubarakkirko100% (1)
- HIGH PERFORMANCE SILICON CONTROLLED RECTIFIERSDocument4 pagesHIGH PERFORMANCE SILICON CONTROLLED RECTIFIERSAlejandro BolañosNo ratings yet
- Datasheet - HK - Tyn225 - Tyn1225 - 305987Document4 pagesDatasheet - HK - Tyn225 - Tyn1225 - 30598711. Nguyễn Gia Huy 0318No ratings yet
- Ultrafast Soft Recovery Rectifier Diode: APT15D100K 1000V 15ADocument4 pagesUltrafast Soft Recovery Rectifier Diode: APT15D100K 1000V 15AQuickerManNo ratings yet
- TYN 0510 - TYN 1010: FeaturesDocument4 pagesTYN 0510 - TYN 1010: FeaturesSofyan AndikaNo ratings yet
- High surge SCRs for power suppliesDocument5 pagesHigh surge SCRs for power suppliesHernan Vallenilla Rumildo MixNo ratings yet
- Motor Protection Settings GuideDocument20 pagesMotor Protection Settings Guideashumanu427No ratings yet
- FCQ10A03L (Diodo Schottky)Document6 pagesFCQ10A03L (Diodo Schottky)Luis Gamalier ZuritaNo ratings yet
- 2 N 1595Document3 pages2 N 1595gerardo floresNo ratings yet
- Super Fast Recovery Diode: Data SheetDocument7 pagesSuper Fast Recovery Diode: Data SheetYogi SaputraNo ratings yet
- Y38KKE: Fast Turn-Off ThyristorDocument3 pagesY38KKE: Fast Turn-Off ThyristordikaranoNo ratings yet
- Slide 6 Motor ProtecDocument25 pagesSlide 6 Motor ProtecBiniyam DameneNo ratings yet
- ABB HV Shunt ReactorDocument30 pagesABB HV Shunt Reactortkdrt2166100% (1)
- Basis Principlesof HVDCDocument27 pagesBasis Principlesof HVDCRajesh Pillai100% (1)
- Short Circuit CalculationDocument42 pagesShort Circuit Calculationgraduadoesime100% (17)
- Fault Level CalculationDocument14 pagesFault Level CalculationRajesh PillaiNo ratings yet
- 08-Presentation Distance ProtectionDocument73 pages08-Presentation Distance ProtectionRajesh Pillai100% (3)
- Knee Voltage FormulaDocument3 pagesKnee Voltage FormulaRajesh PillaiNo ratings yet
- Generator ProtectionDocument22 pagesGenerator ProtectionRajesh Pillai100% (2)
- 07-Busbar Protection Busbar Protection RFDocument63 pages07-Busbar Protection Busbar Protection RFRajesh Pillai100% (2)
- Transmission Line Capacity CalculationDocument11 pagesTransmission Line Capacity CalculationRajesh Pillai88% (16)
- 04-Presentation Analysis of FaultsDocument94 pages04-Presentation Analysis of FaultsRajesh Pillai100% (1)
- 03-Presentation Directional ProtectionDocument37 pages03-Presentation Directional ProtectionRajesh Pillai100% (2)
- 02 - Non-Dir Over CurrentDocument58 pages02 - Non-Dir Over Currenteng_waleed2008No ratings yet
- 2 Fundementals of ProtectionDocument12 pages2 Fundementals of Protectionharsha_iitmNo ratings yet
- Harmonics in Your Elec SystemDocument7 pagesHarmonics in Your Elec SystemAnubhav ShakyaNo ratings yet
- MCZ3334EF Freescale SemiconductorDocument12 pagesMCZ3334EF Freescale SemiconductorEmmanuel ZambranoNo ratings yet
- SA5500-svc ManualDocument135 pagesSA5500-svc ManualDwi Gunawan Saputra100% (1)
- Installation Instructions SimoprimeDocument41 pagesInstallation Instructions SimoprimeJorge Criollo100% (1)
- Deltadrive Dac 50X PDFDocument32 pagesDeltadrive Dac 50X PDFJohnnie Rangel100% (1)
- EmpowerCTA+ User GuideDocument177 pagesEmpowerCTA+ User GuideJose ReyesNo ratings yet
- General Cable Variable Frequency Drive Cable Installation Via Termination Guide FinalDocument4 pagesGeneral Cable Variable Frequency Drive Cable Installation Via Termination Guide FinalMuhammad Didik UjiantoNo ratings yet
- 3808 Multivariable Transmitters Models 3808-10A & 3808-30A & Temperature Transmitter Model 3808-41ADocument174 pages3808 Multivariable Transmitters Models 3808-10A & 3808-30A & Temperature Transmitter Model 3808-41AdayvilNo ratings yet
- Ingersoll-Rand-P-130-Wd Instrucciones Uid 10826354001518003207 PDFDocument52 pagesIngersoll-Rand-P-130-Wd Instrucciones Uid 10826354001518003207 PDFJorge Amenábar0% (1)
- Split Type Aircon Installation ManualDocument30 pagesSplit Type Aircon Installation Manualfreddie reyesNo ratings yet
- Pin 1 Revisited - Jim Brown PDFDocument6 pagesPin 1 Revisited - Jim Brown PDFhompfNo ratings yet
- LFCB 102Document211 pagesLFCB 102Văn Quang NgôNo ratings yet
- Static Electricity: Awareness, Hazards and PreventionDocument22 pagesStatic Electricity: Awareness, Hazards and PreventionFausto Z.No ratings yet
- Sharp Lc-32ld164e Lc-32ld165e lc-32ld166k Lc-32ld165ru Chassis 715g6173mof PDFDocument106 pagesSharp Lc-32ld164e Lc-32ld165e lc-32ld166k Lc-32ld165ru Chassis 715g6173mof PDFnador2302@yahoo.comNo ratings yet
- CLP-150/CLP-150M/ CLP-150C: Service ManualDocument102 pagesCLP-150/CLP-150M/ CLP-150C: Service ManualchagsNo ratings yet
- National Electrical Safety CodeDocument12 pagesNational Electrical Safety Codedjiboutidjibouti0% (1)
- E-Catalogue of TragemeDocument35 pagesE-Catalogue of TragemeCarlos Mario Villa JaramilloNo ratings yet
- Company Directive: Standard Technique: Tp21K/1 Relating To Substation Compound Fence EarthingDocument19 pagesCompany Directive: Standard Technique: Tp21K/1 Relating To Substation Compound Fence Earthingradulescuandrei100No ratings yet
- WEG Ssw06 Soft Starter Manual Ssw06manual Brochure EnglishDocument160 pagesWEG Ssw06 Soft Starter Manual Ssw06manual Brochure EnglishRonimack Trajano de SouzaNo ratings yet
- Detector Hidrogeno UD10+CGSDocument4 pagesDetector Hidrogeno UD10+CGStipcigromeroNo ratings yet
- Dodge Ram 2006 SRM Includes SRT-10 & Diesel Factory Service Manual - Electronic Control Modules - 2Document224 pagesDodge Ram 2006 SRM Includes SRT-10 & Diesel Factory Service Manual - Electronic Control Modules - 2EDGAR BRITONo ratings yet
- Periodic Inspection NotesDocument16 pagesPeriodic Inspection NotesShirishNo ratings yet
- Technical Data: RefrigerationDocument15 pagesTechnical Data: RefrigerationIvanNo ratings yet
- EC6404 Linear Integrated Circuits Lecture Notes Unit 5Document52 pagesEC6404 Linear Integrated Circuits Lecture Notes Unit 5Karthick VijayanNo ratings yet
- KS 1876-1-2010 Overhead Power Lines For Kenya - CodeDocument37 pagesKS 1876-1-2010 Overhead Power Lines For Kenya - CodeColin SillmanNo ratings yet
- Lightning Protection TechnologyDocument48 pagesLightning Protection TechnologyNguyen Phu LocNo ratings yet
- DeltaDocument152 pagesDeltasampathNo ratings yet
- 25458-000-V12-MBPD-02559 Sub 002Document228 pages25458-000-V12-MBPD-02559 Sub 002rajbharath.pNo ratings yet
- Champion PL15 ManualsDocument36 pagesChampion PL15 ManualsGustavo17220% (1)
- Steering Wheel and Steering ColumnDocument90 pagesSteering Wheel and Steering ColumnBRADLEY FLORESNo ratings yet
- FT-12 Technical Manual V.1.35 GB PDFDocument44 pagesFT-12 Technical Manual V.1.35 GB PDFhdq64590No ratings yet