You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Malaysia to Indonesia parcel rates from Pos MalaysiaDocument1 pageMalaysia to Indonesia parcel rates from Pos MalaysiamhdmaxNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Microchip PMSM FOCDocument28 pagesMicrochip PMSM FOCMohammad Arif HossainNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Nokia 3110 Classic UG enDocument48 pagesNokia 3110 Classic UG enMani SinghNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Basic Structure of A Multiple-Paragraph Essay BasicDocument2 pagesThe Basic Structure of A Multiple-Paragraph Essay BasicmhdmaxNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
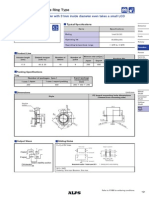
- 50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDDocument3 pages50mm Size Ring Type: Large Encoder With 31mm Inside Diameter Even Takes A Small LCDshyhuNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Applications and Characteristics of Overcurrent Relays (ANSI 50, 51)Document6 pagesApplications and Characteristics of Overcurrent Relays (ANSI 50, 51)catalinccNo ratings yet
- Flyer - ibaPADU 8 HI I - EN PDFDocument2 pagesFlyer - ibaPADU 8 HI I - EN PDFc.a.g.p.No ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Modicon TSX Micro Automation Platform: Presentation, Description, SelectionDocument14 pagesModicon TSX Micro Automation Platform: Presentation, Description, SelectionsebadolzNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Digital Electronics & Fundamentals of Microprocessor: B.E. (Information Technology) Third Semester (C.B.S.)Document2 pagesDigital Electronics & Fundamentals of Microprocessor: B.E. (Information Technology) Third Semester (C.B.S.)Hamit BisaneNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- VIPA System 200V ManualDocument422 pagesVIPA System 200V Manualwww.otomasyonegitimi.comNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- ECE Graduate ResumeDocument2 pagesECE Graduate ResumeBramhendra MNo ratings yet
- RTB CorrectionDocument52 pagesRTB Correctionwilliam lozadaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- IRRInet ACEDocument2 pagesIRRInet ACEmohan niagaraNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Mipi Csi-2Document170 pagesMipi Csi-2back_to_battery100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- B.Tech. ECE-IE Syllabus SRM IST - 2018 Reg.Document124 pagesB.Tech. ECE-IE Syllabus SRM IST - 2018 Reg.Ss StNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Powertron ManualDocument24 pagesPowertron ManualJarek KlamannNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- ElectronicsDocument3 pagesElectronicsashishkumar218No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Pulsar: Pulse Burst RadarDocument8 pagesPulsar: Pulse Burst RadartungluongNo ratings yet
- Forward Error CorrectionDocument5 pagesForward Error CorrectionmkawserNo ratings yet
- Networking Concepts ExplainedDocument3 pagesNetworking Concepts ExplainedDaniel TendeanNo ratings yet
- Sarjana Muda Sains (Fizik Gunaan) Dengan Kepujian Bachelor of Science (Applied Physics) With HonoursDocument44 pagesSarjana Muda Sains (Fizik Gunaan) Dengan Kepujian Bachelor of Science (Applied Physics) With HonoursrahulsinghNo ratings yet
- Manual de Snap Circuits Light en Español Del 82 Al 177 ProyectoDocument39 pagesManual de Snap Circuits Light en Español Del 82 Al 177 Proyectosamuel.guardado.rodriguezNo ratings yet
- HP ELITEBOOK 8740W Inventec Armani 6050A2266501Document61 pagesHP ELITEBOOK 8740W Inventec Armani 6050A2266501Gerardo Mediabilla0% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 1.1 KV Cable Voltage Drope CalculationDocument3 pages1.1 KV Cable Voltage Drope CalculationParmod SainiNo ratings yet
- Laptop Repair - Laptop Parts - Laptop Screen Repair - Computer Repair - Computer Repair and Maintenance - Computer HardwareDocument3 pagesLaptop Repair - Laptop Parts - Laptop Screen Repair - Computer Repair - Computer Repair and Maintenance - Computer HardwareVenkat RaoNo ratings yet
- T1004M6R012Document1 pageT1004M6R012АлександрNo ratings yet
- Ceragon Fibeair RFU-CDocument93 pagesCeragon Fibeair RFU-CZakia OuertaniNo ratings yet
- Sucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoDocument6 pagesSucursal Colón Quito Sucursal Sur Quito Centro de Servicios Técnicos Sucursal Mayor Guayaquil Sucursal Sur Guayaquil Principal QuitoTamara SuconotaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Toshiba DVR dr430 Owners Manual 128979 PDFDocument103 pagesToshiba DVR dr430 Owners Manual 128979 PDFRosanaFonsecaNo ratings yet
- CDD 2600Document20 pagesCDD 2600DrFaisal ShawqeeNo ratings yet
- Chap - 4 - DC Regulated Power SupplyDocument65 pagesChap - 4 - DC Regulated Power SupplyanshikahjjpNo ratings yet
- Optimize Drive ParametersDocument4 pagesOptimize Drive ParametersHeru HaryantoNo ratings yet
- Resistors in Series and ParallelDocument27 pagesResistors in Series and ParallelRaymund EspinoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)