You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Prman NotesDocument9 pagesPrman NotesrendermanuserNo ratings yet
- MultiverseDocument2 pagesMultiverserendermanuserNo ratings yet
- Building Survey: Property AddressDocument47 pagesBuilding Survey: Property AddressrendermanuserNo ratings yet
- Multiverse WorkflowsDocument1 pageMultiverse WorkflowsrendermanuserNo ratings yet
- Comic Design SamplerDocument1 pageComic Design SamplerrendermanuserNo ratings yet
- Arnold For Maya User Guide: SearchDocument2 pagesArnold For Maya User Guide: SearchrendermanuserNo ratings yet
- Maya 3Ds Max Softimage: KatanaDocument1 pageMaya 3Ds Max Softimage: KatanarendermanuserNo ratings yet
- Fusion 8 Scripting GuideDocument217 pagesFusion 8 Scripting GuideAvinash JagarlamudiNo ratings yet
- Katana Viewer A Pi Getting Started GuideDocument30 pagesKatana Viewer A Pi Getting Started GuiderendermanuserNo ratings yet
- GDM February 2009Document68 pagesGDM February 2009rendermanuserNo ratings yet
- How To Get Your SIGGRAPH Paper Rejected: Jim Kajiya, SIGGRAPH 93 Papers ChairDocument4 pagesHow To Get Your SIGGRAPH Paper Rejected: Jim Kajiya, SIGGRAPH 93 Papers ChairrendermanuserNo ratings yet
- Hydra Pixar Presentation S5327-Jeremy-CowlesDocument23 pagesHydra Pixar Presentation S5327-Jeremy-CowlesrendermanuserNo ratings yet
- How To Apply For A Correction To A Death Registration v2.0Document3 pagesHow To Apply For A Correction To A Death Registration v2.0rendermanuserNo ratings yet
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
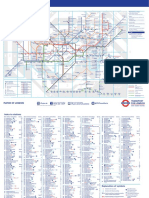
- Standard Tube Map PDFDocument2 pagesStandard Tube Map PDFrendermanuserNo ratings yet
- BG Painting TipsDocument3 pagesBG Painting TipsrendermanuserNo ratings yet
- Cartooning Jobs For Beginning CartoonistsDocument2 pagesCartooning Jobs For Beginning CartoonistsrendermanuserNo ratings yet
- The Know How of CartooningDocument49 pagesThe Know How of CartooningrendermanuserNo ratings yet
- Magic Color Flair The World of Mary Blair PDFDocument20 pagesMagic Color Flair The World of Mary Blair PDFrendermanuser100% (2)
- CBZ90 Sampler PDFDocument9 pagesCBZ90 Sampler PDFrendermanuserNo ratings yet
- Toonstyle Tips (Smallpdf - Com)Document6 pagesToonstyle Tips (Smallpdf - Com)rendermanuserNo ratings yet
- AnimCouleur2 User Guide 01Document2 pagesAnimCouleur2 User Guide 01rendermanuserNo ratings yet
- Illustration MagDocument16 pagesIllustration MagrendermanuserNo ratings yet
- AnimDessin2 User Guide 01Document2 pagesAnimDessin2 User Guide 01rendermanuser100% (1)
- Pythonforkatana 170326112919Document37 pagesPythonforkatana 170326112919rendermanuserNo ratings yet
- How To Read A Skull Like An Open BookDocument8 pagesHow To Read A Skull Like An Open BookrendermanuserNo ratings yet
- Nodal Scene InterfaceDocument51 pagesNodal Scene InterfacerendermanuserNo ratings yet
- Animation Andrew SelbyDocument217 pagesAnimation Andrew Selbyrendermanuser92% (13)
- Comic Artists - WorkingMethodsDocument36 pagesComic Artists - WorkingMethodsrendermanuserNo ratings yet
- Maya Python A PiDocument582 pagesMaya Python A Pirendermanuser100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Multi Meter Triplett 630-NA Tested by ZS1JHGDocument2 pagesMulti Meter Triplett 630-NA Tested by ZS1JHGJohn Howard GreenNo ratings yet
- AluminioDocument14 pagesAluminiobrauliocoroNo ratings yet
- 6-Quantum-Particle (Students Copy)Document12 pages6-Quantum-Particle (Students Copy)Kunal kumarNo ratings yet
- Wind Loads Calculation Eurocode1Document1 pageWind Loads Calculation Eurocode1Karthik KrishNo ratings yet
- 216.1M-14 PreviewDocument4 pages216.1M-14 PreviewSantiago D. VelasquezNo ratings yet
- Bio Analytical SopDocument17 pagesBio Analytical SopalexpharmNo ratings yet
- Fludex Md10 1 Flender Standard Couplings en 0909Document51 pagesFludex Md10 1 Flender Standard Couplings en 0909Diego SilvaNo ratings yet
- The Aircraft Engineer 1928Document130 pagesThe Aircraft Engineer 1928Mark Evan SalutinNo ratings yet
- 1 - SetsDocument2 pages1 - SetsHerald MulanoNo ratings yet
- 750 Multilin Feeder Management Relay ManualDocument446 pages750 Multilin Feeder Management Relay ManualFerdinandja100% (1)
- Physics Enrich Test STPM Sem 1Document17 pagesPhysics Enrich Test STPM Sem 1雷顺开No ratings yet
- FireWall Rebr WebDocument24 pagesFireWall Rebr Webuyab1989No ratings yet
- LabVIEW Sound and Vibration Analysis User Manual (2007)Document199 pagesLabVIEW Sound and Vibration Analysis User Manual (2007)Jefferson MartinezNo ratings yet
- Corrosion Prediction Modelling PDFDocument102 pagesCorrosion Prediction Modelling PDFmilecsa100% (1)
- CNC Machine Tools and Control SystemsDocument39 pagesCNC Machine Tools and Control Systemsp_a_jeevaNo ratings yet
- SDMII Section8 Phases Transformation ExercisesDocument28 pagesSDMII Section8 Phases Transformation ExercisesPheng SeihaksethNo ratings yet
- A Mini Project ReportDocument37 pagesA Mini Project ReportChintuu Sai100% (2)
- Topic 2 - ComplexationDocument48 pagesTopic 2 - ComplexationLokesh JaiswalNo ratings yet
- ECBC Implementation Experience Case StudyDocument16 pagesECBC Implementation Experience Case StudysiddharthaNo ratings yet
- Eye TrackingDocument13 pagesEye TrackingRohit KoulNo ratings yet
- Cleaning Validation ProtocolDocument6 pagesCleaning Validation ProtocolVega life sciences100% (1)
- Design of Induction Coil of A Coreless Induction Furnace To Melt AluminumDocument6 pagesDesign of Induction Coil of A Coreless Induction Furnace To Melt AluminumKyawZawNo ratings yet
- Errors in Chemical AnalysisDocument51 pagesErrors in Chemical AnalysisJeffrey PalconeNo ratings yet
- Engine Design and DevelopmentDocument12 pagesEngine Design and Developmentmyoaung91% (11)
- Raksasa CVDocument5 pagesRaksasa CVLydia Febriana SimanjuntakNo ratings yet
- E 126 - 92 R98 Rteyng - PDFDocument6 pagesE 126 - 92 R98 Rteyng - PDFLuis Alberto Cristo GallegoNo ratings yet
- Assignment 1Document2 pagesAssignment 1sanjana.gummuluruNo ratings yet
- Conduction-Convection Systems: HPDX (T T)Document8 pagesConduction-Convection Systems: HPDX (T T)Nihad MohammedNo ratings yet
- Thermal Stress MonitoringDocument78 pagesThermal Stress MonitoringSIVA KAVYANo ratings yet
- Application of Mecanum WheelsDocument12 pagesApplication of Mecanum WheelsMithun JohnNo ratings yet