You might also like
- Gearbox Design IitDocument25 pagesGearbox Design IitSrini VasanNo ratings yet
- Screw Jack CalculationsDocument6 pagesScrew Jack CalculationsDaniel SherwinNo ratings yet
- Gear4 02Document101 pagesGear4 02pratapslairNo ratings yet
- Ball - Screw - Calculations - As Per THK and PmiDocument5 pagesBall - Screw - Calculations - As Per THK and PmiDharmeshPatelNo ratings yet
- BS Gear StrandedDocument66 pagesBS Gear StrandedRisira Erantha KannangaraNo ratings yet
- Basic Technical Winch InformationDocument7 pagesBasic Technical Winch InformationMarcos GonzalezNo ratings yet
- Steel-Smith PDF CatalogueDocument93 pagesSteel-Smith PDF CatalogueneetadaeroNo ratings yet
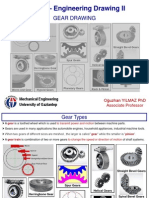
- ME 114 Engineering Drawing II Gear DrawingDocument12 pagesME 114 Engineering Drawing II Gear Drawingpradeep315No ratings yet
- Gear DesignDocument53 pagesGear Designtheleovn100% (3)
- Draw SprocketDocument15 pagesDraw Sprocketfernandop_77No ratings yet
- Calculation of Screw Action ForceDocument3 pagesCalculation of Screw Action ForceShivam Gukhoul100% (1)
- Chapter 5 - Shaft DesignDocument0 pagesChapter 5 - Shaft DesignwanpudinNo ratings yet
- Design calculations for worm gearDocument3 pagesDesign calculations for worm gearVenkateswaran venkateswaranNo ratings yet
- Rack and Pinion Calculations PDFDocument4 pagesRack and Pinion Calculations PDFCarlos LopezNo ratings yet
- Ch4 Belt Drives-2Document40 pagesCh4 Belt Drives-2Abaziz Mousa OutlawZzNo ratings yet
- Flat Belt CalculationDocument19 pagesFlat Belt CalculationAstri NgentNo ratings yet
- Sprocket DesignDocument4 pagesSprocket DesignchethanNo ratings yet
- Gear CalculationDocument58 pagesGear CalculationSachin KubasadNo ratings yet
- Machine Elements Design GuideDocument83 pagesMachine Elements Design GuideAyush Bhardwaj100% (1)
- Select the Right Industrial Gearbox in 15 StepsDocument4 pagesSelect the Right Industrial Gearbox in 15 StepssanjushaNo ratings yet
- 03-Bearing Life PDFDocument34 pages03-Bearing Life PDFchanayireNo ratings yet
- MACHINING AND SHEET METAL TOLERANCESDocument1 pageMACHINING AND SHEET METAL TOLERANCESDenny Ilyas AttamimiNo ratings yet
- 20 Design of Helical Springs For Variable LoadDocument16 pages20 Design of Helical Springs For Variable LoadPRASAD326No ratings yet
- Belts, Chains, Pulleys, Gears, Clutches and Brakes GuideDocument76 pagesBelts, Chains, Pulleys, Gears, Clutches and Brakes GuideAMCFC BlueNo ratings yet
- B.1.1 Spur Gears With Gearwheels-10Document34 pagesB.1.1 Spur Gears With Gearwheels-10Ganapathy Subramaniam100% (1)
- Spline DesignDocument5 pagesSpline DesignRuchira Chanda Indu100% (2)
- Machine Elements Design Guide for Threaded Joints and Power ScrewsDocument72 pagesMachine Elements Design Guide for Threaded Joints and Power Screwsf2012265No ratings yet
- Overhead Conveyor Products PDFDocument16 pagesOverhead Conveyor Products PDFPierre Hopkins100% (1)
- Direct Gear DesignDocument7 pagesDirect Gear DesignFranco Angelo RegenciaNo ratings yet
- Design and Analysis of An Epicyclic Gearbox For An Electric DrivetrainDocument9 pagesDesign and Analysis of An Epicyclic Gearbox For An Electric DrivetrainNajrul IslamNo ratings yet
- Iso 6336 Hohn PDFDocument6 pagesIso 6336 Hohn PDFmgualdiNo ratings yet
- Machine Design Lec3Document75 pagesMachine Design Lec3sam0415No ratings yet
- Gearbox Project ReportDocument11 pagesGearbox Project Reportalexpatow50% (2)
- Gear TechnologyDocument132 pagesGear TechnologyJorge Sousa100% (4)
- ALRO MetalsGuidePDFCatalogJune2013LRDocument544 pagesALRO MetalsGuidePDFCatalogJune2013LRIsmael ZavalaNo ratings yet
- Gear Design & ManufacturingDocument12 pagesGear Design & ManufacturingAbdulrahman AlkhowaiterNo ratings yet
- Gear Coupling 2014Document4 pagesGear Coupling 2014Dado Maja ArseninNo ratings yet
- Spur Gear DesignDocument51 pagesSpur Gear Designmshebbal2212100% (1)
- Gears Design MD2Document52 pagesGears Design MD2Faizan MohyuddinNo ratings yet
- Worm Wheel Design ProcessDocument28 pagesWorm Wheel Design ProcessMuhammadTayyabNo ratings yet
- Gear Design ProcedureDocument9 pagesGear Design Procedurenithree100% (1)
- Making Macros in SOLIDWORKS - Engineers Rule PDFDocument15 pagesMaking Macros in SOLIDWORKS - Engineers Rule PDFch_deepakNo ratings yet
- Planetry GearsDocument10 pagesPlanetry Gearsvinu1175No ratings yet
- Design of Gear BoxDocument19 pagesDesign of Gear BoxSUMIT MALUSARE100% (1)
- Gear Box DesignDocument24 pagesGear Box DesignBada KimNo ratings yet
- Advances in Machine Tool Design and Research 1967: Proceedings of the 8th International M.T.D.R. Conference (Incorporating the 2nd International CIRP Production Engineering Research Conference), the University of Manchester Institute of Science and Technology, September 1967From EverandAdvances in Machine Tool Design and Research 1967: Proceedings of the 8th International M.T.D.R. Conference (Incorporating the 2nd International CIRP Production Engineering Research Conference), the University of Manchester Institute of Science and Technology, September 1967S. A. TobiasRating: 4 out of 5 stars4/5 (1)
- Machine Design Elements and AssembliesFrom EverandMachine Design Elements and AssembliesRating: 3.5 out of 5 stars3.5/5 (2)
- Torque CalculationDocument5 pagesTorque CalculationMichael Alberto Ferreira da ConceiçãoNo ratings yet
- Motor Torque Calculation: Lead Screw Drive LoadsDocument5 pagesMotor Torque Calculation: Lead Screw Drive LoadsTruta IonutNo ratings yet
- Belt Conveyor Sizing ToolDocument3 pagesBelt Conveyor Sizing ToolAlejandroNo ratings yet
- Lecture 2Document9 pagesLecture 2وسام السيدNo ratings yet
- Dimentions and FormulasDocument10 pagesDimentions and FormulasManohar Babu100% (1)
- VSF - Symbols and FormulasDocument2 pagesVSF - Symbols and FormulasHassan MoazenNo ratings yet
- Ads ServoselDocument2 pagesAds ServoselgabisaNo ratings yet
- RD3 8 en 61120 02 09Document4 pagesRD3 8 en 61120 02 09Sanjula Darshana WickramasingheNo ratings yet
- Heat Genarating RubberDocument2 pagesHeat Genarating RubberSanjula Darshana WickramasingheNo ratings yet
- Coconut Harvesting MachineDocument64 pagesCoconut Harvesting MachineSanjula Darshana WickramasingheNo ratings yet
- Positive Thinking and MeditationDocument14 pagesPositive Thinking and MeditationSanjula Darshana WickramasingheNo ratings yet
- Mobile Phone Based Remote ControllerDocument7 pagesMobile Phone Based Remote ControllerSanjula Darshana WickramasingheNo ratings yet
- Three QR CodeDocument20 pagesThree QR CodeSaiprasanthi RakeshNo ratings yet
- Activating An Electrical Device Via DTMF TelephoneDocument4 pagesActivating An Electrical Device Via DTMF Telephonev2brother100% (1)
- Transducer ArticleDocument6 pagesTransducer ArticleSanjula Darshana WickramasingheNo ratings yet
- Adn 007Document2 pagesAdn 007thangaraj_icNo ratings yet
- US4204197 Digital ScaleDocument93 pagesUS4204197 Digital ScaleSanjula Darshana WickramasingheNo ratings yet
- Sky Telescope 201304Document90 pagesSky Telescope 201304Haydn BassarathNo ratings yet
- Cot 2018-2019Document11 pagesCot 2018-2019Crush Na Crush KitaNo ratings yet
- Power System Stability-Chapter 3Document84 pagesPower System Stability-Chapter 3Du TrầnNo ratings yet
- AOAC BAX Assay Listeria Monocytogenes RT 121402Document18 pagesAOAC BAX Assay Listeria Monocytogenes RT 121402Yesenia Borja ArroyoNo ratings yet
- Line Tension and Pole StrengthDocument34 pagesLine Tension and Pole StrengthDon BunNo ratings yet
- Unit 2Document76 pagesUnit 2Mithila100% (1)
- Flow MeterDocument9 pagesFlow MeterShin BoNo ratings yet
- Chemistry Paper (Chap 1-4)Document2 pagesChemistry Paper (Chap 1-4)XarOonNo ratings yet
- Chapter 11 - MatricesDocument39 pagesChapter 11 - MatricesJhagantini Palanivelu0% (1)
- Chevalier FSG-1224ADIIIDocument12 pagesChevalier FSG-1224ADIIIOsvaldo MarinNo ratings yet
- Angle Facts Powerpoint ExcellentDocument10 pagesAngle Facts Powerpoint ExcellentNina100% (1)
- GGGDocument23 pagesGGGWarNaWarNiNo ratings yet
- MSC Syllabus PDFDocument34 pagesMSC Syllabus PDFMayadarNo ratings yet
- Binder 1Document36 pagesBinder 1BobbyNo ratings yet
- Science - Abm8566 SMDocument51 pagesScience - Abm8566 SMBhabaniNo ratings yet
- MICREC1 Complete Lecture Notes - TermDocument168 pagesMICREC1 Complete Lecture Notes - TermdsttuserNo ratings yet
- Eaton 290376 NZMH4 VE800 S1 en - GBDocument10 pagesEaton 290376 NZMH4 VE800 S1 en - GBkarthik01heroNo ratings yet
- TOS in PRE-CALCULUSDocument2 pagesTOS in PRE-CALCULUSSerjohnRapsingNo ratings yet
- Interface Requirements SpecificationDocument27 pagesInterface Requirements Specificationdhanoj6522No ratings yet
- The Iec GooseDocument2 pagesThe Iec GooseGalo VacaNo ratings yet
- Sampling, Testing, and Analysis of Asphalt Roll Roofing, Cap Sheets, and Shingles Used in Roofing and WaterproofingDocument13 pagesSampling, Testing, and Analysis of Asphalt Roll Roofing, Cap Sheets, and Shingles Used in Roofing and WaterproofingLuigi HernándezNo ratings yet
- AlgebraI Part2Document42 pagesAlgebraI Part2Marcial Jr. MilitanteNo ratings yet
- Modeling Confined Masonry Walls with OpeningsDocument11 pagesModeling Confined Masonry Walls with OpeningsMangisi Haryanto ParapatNo ratings yet
- Grade 4 Maths 1Document4 pagesGrade 4 Maths 1tmunyonho18No ratings yet
- DRV IpDocument23 pagesDRV IpTim MarshallNo ratings yet
- Air Suspension Benefits Over Steel SpringsDocument3 pagesAir Suspension Benefits Over Steel SpringsBejoy G NairNo ratings yet
- Hypothesis TestingDocument2 pagesHypothesis TestingNerish PlazaNo ratings yet
- The Gist of NCERT General Science PDFDocument148 pagesThe Gist of NCERT General Science PDFSatyajitSahooNo ratings yet
- Laing Electric Heater-CirculatorDocument20 pagesLaing Electric Heater-Circulatorkamilawehbe100% (1)
- CN Lab ManualDocument49 pagesCN Lab ManualKN DEEPSHI100% (1)