You might also like
- Stability Theory IIIDocument32 pagesStability Theory IIISergio RuedaNo ratings yet
- Chapter 10 - Curves of Statical Stability (GZ Curves)Document9 pagesChapter 10 - Curves of Statical Stability (GZ Curves)Adrian B.100% (1)
- Producing A Curve of Statical StabilityDocument8 pagesProducing A Curve of Statical Stabilitysafebodi3100% (1)
- A General Discussion On Ship StabilityDocument6 pagesA General Discussion On Ship StabilityAnonymous UCveMQNo ratings yet
- Damage Stability Analysis in Particular Flooding S PDFDocument11 pagesDamage Stability Analysis in Particular Flooding S PDFAnant AjithkumarNo ratings yet
- Five Methods of Putting a Single Cylinder Out of OperationDocument4 pagesFive Methods of Putting a Single Cylinder Out of OperationAnakin SkywalkerNo ratings yet
- Tonnage MeasurementDocument5 pagesTonnage Measurementbhaswath2000No ratings yet
- HongKong Convention, Green Passport & IHMDocument8 pagesHongKong Convention, Green Passport & IHMRahul Devnath100% (1)
- PAPER NO.: 224 The UEC Engine Program and Its Latest DevelopmentDocument8 pagesPAPER NO.: 224 The UEC Engine Program and Its Latest DevelopmentОлег ГутникNo ratings yet
- Marine Cargo Operations MCAO1010 Course Notes Tankers - Cargo Equipment (Basic)Document12 pagesMarine Cargo Operations MCAO1010 Course Notes Tankers - Cargo Equipment (Basic)sukhjit78No ratings yet
- 01-NAC-Introduction To Ship Stability (171229) - Student PDFDocument61 pages01-NAC-Introduction To Ship Stability (171229) - Student PDFpothirajNo ratings yet
- 10a.1 - Ship Handling HydrodynamicsDocument34 pages10a.1 - Ship Handling HydrodynamicsRaghav Sood100% (1)
- Assistance and SalvageDocument13 pagesAssistance and SalvageNuman Kooliyat IsmethNo ratings yet
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocument6 pagesB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- Steering Gear Systems On Ships NotesDocument13 pagesSteering Gear Systems On Ships NotesRoche Gallardo TampilNo ratings yet
- GZ Curves For Different Conditions, List LollDocument23 pagesGZ Curves For Different Conditions, List LollAbhishek PawarNo ratings yet
- Lesson 1 - Steering Control SystemDocument25 pagesLesson 1 - Steering Control SystemAsaelion Wre100% (1)
- 06 NAC Free Surface Effect (160213)Document10 pages06 NAC Free Surface Effect (160213)Gilles MathieuNo ratings yet
- 47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-ADocument23 pages47 5815 MT222 2015 1 1 1 Ch.6 Transverse Statical Stability-AManoj KumarNo ratings yet
- Ballast Water ExchangeDocument3 pagesBallast Water ExchangePolisciuc Radu100% (1)
- Phase 1 Naval Arch Theory QuestionsDocument6 pagesPhase 1 Naval Arch Theory QuestionsSam UelNo ratings yet
- Some Test About RuddersDocument2 pagesSome Test About RuddersVaibhav DesaiNo ratings yet
- Mukhopadhyay Question-Answer: 1. Latest Regulations For Bulk CarrierDocument88 pagesMukhopadhyay Question-Answer: 1. Latest Regulations For Bulk CarrierMariyath Muraleedharan KiranNo ratings yet
- Damage StabilityDocument11 pagesDamage Stabilitypolaris2550% (2)
- Commercial QnA 1 YearDocument27 pagesCommercial QnA 1 YearMariyath Muraleedharan KiranNo ratings yet
- Approximate integration techniques for calculating ship propertiesDocument14 pagesApproximate integration techniques for calculating ship propertiesAchonk Gio VelenoNo ratings yet
- Centre of BuoyancyDocument4 pagesCentre of BuoyancyAnna E A. CamañoNo ratings yet
- Prevention and Control of Oil Pollution From Ships Marpol - 73/78 Annex - IDocument42 pagesPrevention and Control of Oil Pollution From Ships Marpol - 73/78 Annex - Inb JmsNo ratings yet
- Intact StabilityDocument1 pageIntact StabilityislimaNo ratings yet
- Section 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1Document8 pagesSection 23 Intact and Damage Stability: I - Part 6 GL 2010 Page 23-1JAAK2005No ratings yet
- Tug Girting: AssessmentDocument31 pagesTug Girting: AssessmentOrlando QuevedoNo ratings yet
- Garbage Placard ColourDocument1 pageGarbage Placard ColoursinghajitbNo ratings yet
- CALCULATING STABILITY METRICS LIKE KB, BM AND GMDocument16 pagesCALCULATING STABILITY METRICS LIKE KB, BM AND GMKunal BhatiaNo ratings yet
- D2 Bilge, Ballast SystemsDocument10 pagesD2 Bilge, Ballast SystemsGica Si PopescuNo ratings yet
- HARMONIZED SYSTEM ENTERS FORCEDocument8 pagesHARMONIZED SYSTEM ENTERS FORCEErrol RodriguesNo ratings yet
- SMSC-1400-01 - Answer KeysDocument5 pagesSMSC-1400-01 - Answer KeysAmir SoleimanyNo ratings yet
- Marpol Annex 6Document11 pagesMarpol Annex 6tripuraridheerajNo ratings yet
- Wet Damage On Bulk Carriers: With You at All TimesDocument32 pagesWet Damage On Bulk Carriers: With You at All TimesDerfliw John Valenzuela Gayanoche100% (1)
- Marpol SECADocument3 pagesMarpol SECAAnonymous XtvvG80zuNo ratings yet
- Comparison of Stability of A Ship in The Light and Fully LoaDocument4 pagesComparison of Stability of A Ship in The Light and Fully LoaBharatiyulamNo ratings yet
- Deck MachineryDocument10 pagesDeck Machineryaman kumarNo ratings yet
- What Is International Grain CodeDocument3 pagesWhat Is International Grain CodeJames JarabeloNo ratings yet
- MARPOL 12aDocument12 pagesMARPOL 12agmarinovNo ratings yet
- Damaged StabilityDocument4 pagesDamaged StabilityUjjwal VermaNo ratings yet
- ch1 Framing SystemDocument12 pagesch1 Framing Systemموبليات حسين المصريNo ratings yet
- EGBDocument5 pagesEGBSwarg VibhaNo ratings yet
- 2nd Mates Handout ARI F3 LawDocument57 pages2nd Mates Handout ARI F3 LawravelobeNo ratings yet
- Fore EndDocument6 pagesFore Endpramodkb_cusatNo ratings yet
- BulkheadsDocument6 pagesBulkheadsSunil Dayalu100% (2)
- REEDS - BOILERS - PAGES 01 To 40Document40 pagesREEDS - BOILERS - PAGES 01 To 40Narendra niranjan MathiyarasuNo ratings yet
- H2 Folding Hatch Covers - Original - 30544 PDFDocument8 pagesH2 Folding Hatch Covers - Original - 30544 PDFGILL2013No ratings yet
- Guide to the influence of ground reaction on ship stabilityDocument12 pagesGuide to the influence of ground reaction on ship stabilityamr_tarek_26No ratings yet
- Lesson 3 - Ship Stability 2Document3 pagesLesson 3 - Ship Stability 2amirsyawal87No ratings yet
- TOWING PREPDocument7 pagesTOWING PREPMico SantosNo ratings yet
- LPG Reliquefaction Process ExplainedDocument24 pagesLPG Reliquefaction Process ExplainedAltamash TamboliNo ratings yet
- D1MC Semester 1 / Ship Stability / April 2006/capt - MARDocument37 pagesD1MC Semester 1 / Ship Stability / April 2006/capt - MARMohd Azril NaharudinNo ratings yet
- Unit 2 - Tropical Revolving Systems (TRS)Document91 pagesUnit 2 - Tropical Revolving Systems (TRS)Noli ChristianNo ratings yet
- Crash Stop ManoeuvresDocument2 pagesCrash Stop ManoeuvresMayura RanatungaNo ratings yet
- Mates Stability 1 PDFDocument21 pagesMates Stability 1 PDFSergey Vasilievich ChetverichenkoNo ratings yet
- ABS - Ballast Water Exchange ProceduresDocument26 pagesABS - Ballast Water Exchange Proceduresgeorgekc77No ratings yet
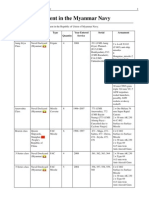
- Navy Equipment of MyanmarDocument4 pagesNavy Equipment of MyanmarsithusoemoeNo ratings yet
- Certificate of Sea ServiceDocument1 pageCertificate of Sea ServicebjhonrioNo ratings yet
- Gardian 1 20m CatamaranDocument16 pagesGardian 1 20m Catamaranzelayolanda2No ratings yet
- MGN 0018 - Dangers of InteractionDocument4 pagesMGN 0018 - Dangers of InteractiontonyNo ratings yet
- Swietenia MahagoniDocument6 pagesSwietenia Mahagonimilos010No ratings yet
- Amended Sop - Inspection For RTPDocument21 pagesAmended Sop - Inspection For RTPMarieo ParillaNo ratings yet
- Detainable Deficiency by PSCDocument23 pagesDetainable Deficiency by PSCSardar Sirajul Islam100% (3)
- TAT Spec SheetDocument2 pagesTAT Spec SheetLegend AnbuNo ratings yet
- Naval Terms and PhraseologiesDocument20 pagesNaval Terms and PhraseologiesTALINGDAN, AGNER CHRISTIAN FULGENCIO0% (1)
- USS SIMPSON (FFG-56) Is Underway On An Even Keel at A Draft of 16 Feet. LPP 408 FTDocument1 pageUSS SIMPSON (FFG-56) Is Underway On An Even Keel at A Draft of 16 Feet. LPP 408 FTTruong NguyenNo ratings yet
- Ships Particulars 161Document2 pagesShips Particulars 161Ahmed HossamNo ratings yet
- MaritimeReporter 1994 01Document92 pagesMaritimeReporter 1994 01Juan Carlos Puma ReáteguiNo ratings yet
- Roman ShipsDocument7 pagesRoman Shipsapi-344996216No ratings yet
- Challenges in Naval Ship Maintenance R290917Document15 pagesChallenges in Naval Ship Maintenance R290917arshadtk1923No ratings yet
- Bulk Carrier 3 BallastDocument35 pagesBulk Carrier 3 BallastСтанислав БаталовNo ratings yet
- Marine Electronics Communications 4th Quarter 2017Document50 pagesMarine Electronics Communications 4th Quarter 2017Fermin Arteaga RiveraNo ratings yet
- Douala Port InformationsDocument10 pagesDouala Port InformationsDelmas Daris TAMBU DZUPIAPNo ratings yet
- Complete Lesson 4 Assessment Task On The Maneuver of The ShipDocument2 pagesComplete Lesson 4 Assessment Task On The Maneuver of The ShipMixed VideosNo ratings yet
- CV Anton SetiawanDocument1 pageCV Anton SetiawanVivin PrintNo ratings yet
- China's First G-type Engine and SCR System Developments for NOx ReductionDocument12 pagesChina's First G-type Engine and SCR System Developments for NOx ReductionŞansal DikmenerNo ratings yet
- MSC Napoli - DNV InvestigationDocument21 pagesMSC Napoli - DNV InvestigationtiagolirapeNo ratings yet
- Bangladesh Inland Water Transport Authority (BIWTA)Document2 pagesBangladesh Inland Water Transport Authority (BIWTA)Mohammad Saiful Islam SujonNo ratings yet
- UAEDocument2 pagesUAEHemaNo ratings yet
- Rudder Prepared by SafkatDocument5 pagesRudder Prepared by SafkatSafkat Jubaer ShuvoNo ratings yet
- BOABARGE 33-34 Brochure PDFDocument4 pagesBOABARGE 33-34 Brochure PDFATQNo ratings yet
- Bulk Cargo Unloading Plan in SURABAYADocument4 pagesBulk Cargo Unloading Plan in SURABAYAHanafi Yusuf AviansyahNo ratings yet
- Turning CircleDocument8 pagesTurning CircleAkash KandwalNo ratings yet
- AWS Welding Journal (Dec 2011)Document138 pagesAWS Welding Journal (Dec 2011)Patrick DominguezNo ratings yet
- Naval Architecture Theory Section I, II & Numerical Section II LASTDocument20 pagesNaval Architecture Theory Section I, II & Numerical Section II LASTGanesh MohiteNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Oil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionFrom EverandOil and Gas Pipelines and Piping Systems: Design, Construction, Management, and InspectionRating: 4.5 out of 5 stars4.5/5 (16)
- Industrial Piping and Equipment Estimating ManualFrom EverandIndustrial Piping and Equipment Estimating ManualRating: 5 out of 5 stars5/5 (7)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Asset Integrity Management for Offshore and Onshore StructuresFrom EverandAsset Integrity Management for Offshore and Onshore StructuresNo ratings yet
- Machine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesFrom EverandMachine Learning and Data Science in the Oil and Gas Industry: Best Practices, Tools, and Case StudiesPatrick BangertRating: 3 out of 5 stars3/5 (2)
- Machinery Lubrication Technician (MLT) I and II Certification Exam GuideFrom EverandMachinery Lubrication Technician (MLT) I and II Certification Exam GuideRating: 2 out of 5 stars2/5 (1)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Pipeline Integrity: Management and Risk EvaluationFrom EverandPipeline Integrity: Management and Risk EvaluationRating: 4.5 out of 5 stars4.5/5 (6)
- Hydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisFrom EverandHydraulic Fracturing in Unconventional Reservoirs: Theories, Operations, and Economic AnalysisNo ratings yet
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsFrom EverandPractical Wellbore Hydraulics and Hole Cleaning: Unlock Faster, more Efficient, and Trouble-Free Drilling OperationsRating: 5 out of 5 stars5/5 (1)
- Pile Design and Construction Rules of ThumbFrom EverandPile Design and Construction Rules of ThumbRating: 4.5 out of 5 stars4.5/5 (15)