You might also like
- Bandpass filter design using MatlabDocument9 pagesBandpass filter design using MatlabKikiKartikaDewiNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Finite Impulse Response (Fir) : ObjectivesDocument9 pagesFinite Impulse Response (Fir) : ObjectivesAldon JimenezNo ratings yet
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- Convolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryFrom EverandConvolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryNo ratings yet
- Name of Exp:: Design & Implementation of Finite Impulse Response (FIR) FilterDocument4 pagesName of Exp:: Design & Implementation of Finite Impulse Response (FIR) FilterOmor Faruque AbirNo ratings yet
- FIR Filters Design and Window FunctionsDocument8 pagesFIR Filters Design and Window FunctionsGaneshVenkatachalamNo ratings yet
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Finite Impulse ResponseDocument6 pagesFinite Impulse ResponseYoga Putra PratamaNo ratings yet
- Lab.4&5. FIR FiltersDocument7 pagesLab.4&5. FIR Filtersآيـة جمال عبد الفتاح الراويNo ratings yet
- Lab.4&5. FIR FiltersDocument7 pagesLab.4&5. FIR FiltersKen MutaiNo ratings yet
- Multilayer Perceptron: Fundamentals and Applications for Decoding Neural NetworksFrom EverandMultilayer Perceptron: Fundamentals and Applications for Decoding Neural NetworksNo ratings yet
- Assignment 0f PMDocument14 pagesAssignment 0f PMMirza AzeemNo ratings yet
- Simulation of Digital Communication Systems Using MatlabFrom EverandSimulation of Digital Communication Systems Using MatlabRating: 3.5 out of 5 stars3.5/5 (22)
- FIR FILTERS IMPLEMENTATION APPROACHES REPORTDocument14 pagesFIR FILTERS IMPLEMENTATION APPROACHES REPORTH052 Rajesh Komaravalli ECENo ratings yet
- Windows Used or Impact TestingDocument5 pagesWindows Used or Impact TestingAhmed El TayebNo ratings yet
- Designing FIR Filters Using Window TechniquesDocument42 pagesDesigning FIR Filters Using Window TechniquesİBRAHİM YÜMLÜNo ratings yet
- Course Work 1Document9 pagesCourse Work 1Mark FreemanNo ratings yet
- University of Kentucky: EE 422G - Signals and Systems LaboratoryDocument5 pagesUniversity of Kentucky: EE 422G - Signals and Systems Laboratoryamina sayahNo ratings yet
- Design of FIR Filter Using Hamming WindowDocument4 pagesDesign of FIR Filter Using Hamming WindownomomumuffNo ratings yet
- Design and FPGA Implementation of Variable FIR Filters Using The Spectral Parameter Approximation and Time-Domain ApproachDocument5 pagesDesign and FPGA Implementation of Variable FIR Filters Using The Spectral Parameter Approximation and Time-Domain ApproachRahul SharmaNo ratings yet
- Design of FIR Half-Band Filter With Controllable T PDFDocument12 pagesDesign of FIR Half-Band Filter With Controllable T PDFneelima422No ratings yet
- DSP Interview Questions and TopicsDocument16 pagesDSP Interview Questions and TopicsAkanksha Bhutani100% (7)
- Basic Processing - Definitions - Presentation - From - Xsgeo-Dot-Com - 1999Document9 pagesBasic Processing - Definitions - Presentation - From - Xsgeo-Dot-Com - 1999Muhammad BilalNo ratings yet
- Digital Filter: Sinusoidal ResponseDocument3 pagesDigital Filter: Sinusoidal ResponseAltaf HussainNo ratings yet
- Interpolated FIR Filter (MITRA)Document8 pagesInterpolated FIR Filter (MITRA)Brandon HerreraNo ratings yet
- FIR Filter Windowing DesignDocument6 pagesFIR Filter Windowing DesignMuhammad SameerNo ratings yet
- Jiangcheng Bao and Richard W. LongmanDocument20 pagesJiangcheng Bao and Richard W. LongmanAyman IsmailNo ratings yet
- Comparision of Optimum FIR Filters and Delay EqualizedDocument15 pagesComparision of Optimum FIR Filters and Delay EqualizedSravana JyothiNo ratings yet
- Nine Digital Filters Decimation Interpolation: For andDocument6 pagesNine Digital Filters Decimation Interpolation: For andМаксим СлуживыйNo ratings yet
- Bilinear TransformDocument5 pagesBilinear Transformbrown222No ratings yet
- Solution Manual For Introduction To Digital Signal Processing 1st Edition Dick Blandford John ParrDocument40 pagesSolution Manual For Introduction To Digital Signal Processing 1st Edition Dick Blandford John ParrCrystalGalvantebi100% (45)
- CrossoverFilters White Paper - CDocument13 pagesCrossoverFilters White Paper - CCesare PaguraNo ratings yet
- Design Chebyshev FIR Filters in MATLABDocument4 pagesDesign Chebyshev FIR Filters in MATLABRamanathan SunderNo ratings yet
- 'S Method) Is Used In: TustinDocument9 pages'S Method) Is Used In: TustinTom JerryNo ratings yet
- Filtro Fir2Document16 pagesFiltro Fir2DarWin VinueZaNo ratings yet
- Phase Relations in Active Filters: Understanding Phase Shifts Across OrdersDocument5 pagesPhase Relations in Active Filters: Understanding Phase Shifts Across OrdersbiswajitntpcNo ratings yet
- On Room Correction PDFDocument12 pagesOn Room Correction PDFAnthony HubbardNo ratings yet
- Q.Explain Aliasing Concept With ExampleDocument15 pagesQ.Explain Aliasing Concept With ExampleManvita MoreNo ratings yet
- 2 MarksDocument2 pages2 MarksEzhilya VenkatNo ratings yet
- Window Function: Signal Processing Mathematical Function IntervalDocument29 pagesWindow Function: Signal Processing Mathematical Function IntervalDhimas Arief DharmawanNo ratings yet
- Lab 5Document3 pagesLab 5Sameera මලිත් WithanachchiNo ratings yet
- New digital filter for phasor computationDocument6 pagesNew digital filter for phasor computationFabien CallodNo ratings yet
- Dispersive Delay Lines: Matched Filters For Signal ProcessingDocument7 pagesDispersive Delay Lines: Matched Filters For Signal ProcessingMini KnowledgeNo ratings yet
- Digital Design of Filters (FIR,IIR) -part1 ايادDocument19 pagesDigital Design of Filters (FIR,IIR) -part1 ايادMohammed YounisNo ratings yet
- The Lecture Contains:: Lecture 23: Typical Filters For Deinterlacing, Spatio-Temporal FilteringDocument7 pagesThe Lecture Contains:: Lecture 23: Typical Filters For Deinterlacing, Spatio-Temporal FilteringAdeoti OladapoNo ratings yet
- Signal Processing: AssignmentDocument15 pagesSignal Processing: AssignmentRAHULNo ratings yet
- L 6Document11 pagesL 6mxjoeNo ratings yet
- Analysis of The Fixed Window Functions in The Fractional Fourier DomainDocument7 pagesAnalysis of The Fixed Window Functions in The Fractional Fourier DomainseventhsensegroupNo ratings yet
- Diseño de Filtros IIR y FIRDocument11 pagesDiseño de Filtros IIR y FIRacajahuaringaNo ratings yet
- Window FunctionsDocument11 pagesWindow FunctionsK100% (1)
- De-Noising The Speech Signal With FIR Filter Based On MatlabDocument6 pagesDe-Noising The Speech Signal With FIR Filter Based On MatlabBasma JumaaNo ratings yet
- FFT WindowsDocument7 pagesFFT WindowsA J Naveen.100% (3)
- E E 2 7 5 Lab: FIR & IIR Filters in MatlabDocument11 pagesE E 2 7 5 Lab: FIR & IIR Filters in MatlabTapas MandalNo ratings yet
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDocument22 pagesA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupNo ratings yet
- Computer Systems Engineering Student NotesDocument68 pagesComputer Systems Engineering Student NotesmpssassygirlNo ratings yet
- Real Time Face Recognition Using AdaBoost Improved Fast PCA AlgorithmDocument14 pagesReal Time Face Recognition Using AdaBoost Improved Fast PCA AlgorithmAdam HansenNo ratings yet
- Training A SVM in A PrimalDocument24 pagesTraining A SVM in A PrimalmpssassygirlNo ratings yet
- Joachims - 02c Rank SVMDocument10 pagesJoachims - 02c Rank SVMmpssassygirlNo ratings yet
- ECE 2010-11 @examsaddaDocument34 pagesECE 2010-11 @examsaddampssassygirlNo ratings yet
- The Cardiovascular SystemDocument19 pagesThe Cardiovascular SystemmpssassygirlNo ratings yet
- Radhakrishnan Uta 2502M 11515Document65 pagesRadhakrishnan Uta 2502M 11515mpssassygirlNo ratings yet
- Chapter 2 - FIR Filters - Digital Filter Design - MikroElektronikaDocument101 pagesChapter 2 - FIR Filters - Digital Filter Design - MikroElektronikampssassygirlNo ratings yet
- ch10 1Document85 pagesch10 1mpssassygirlNo ratings yet
- 013-Dc Motor Speed ControlDocument1 page013-Dc Motor Speed ControlmpssassygirlNo ratings yet
- JPEG Image Compression Quality EffectsDocument5 pagesJPEG Image Compression Quality EffectsmpssassygirlNo ratings yet
- VLSI CMOS Interview Questions and AnswersDocument67 pagesVLSI CMOS Interview Questions and AnswersrAM95% (85)
- Thesis-Discovering Visual Features of The Environment and Building 3D Map From A Single Camera MotionDocument73 pagesThesis-Discovering Visual Features of The Environment and Building 3D Map From A Single Camera MotionmpssassygirlNo ratings yet
- Introduction To Support Vector Machines: 1 DescriptionDocument15 pagesIntroduction To Support Vector Machines: 1 DescriptionchiemeraNo ratings yet
- Sound Processing: Vikas Sahdev Rajesh Samudrala Rajani Shankar SadasivamDocument23 pagesSound Processing: Vikas Sahdev Rajesh Samudrala Rajani Shankar Sadasivammpssassygirl100% (1)
- ML2012 FP Yaniv BarDocument11 pagesML2012 FP Yaniv BarmpssassygirlNo ratings yet
- Lab 2Document13 pagesLab 2tomsds5310No ratings yet
- Analysis of Bit Error Rate Improvement inDocument5 pagesAnalysis of Bit Error Rate Improvement inmpssassygirlNo ratings yet
- Transfer Process: Course ContentDocument10 pagesTransfer Process: Course ContentmpssassygirlNo ratings yet
- Solution Manual Microprocessors and Interfacing DV HallDocument64 pagesSolution Manual Microprocessors and Interfacing DV HallFaro Val0% (2)
- Introduction to TEX/LATEX for typesetting documentsDocument3 pagesIntroduction to TEX/LATEX for typesetting documentsmpssassygirlNo ratings yet
- ECE - Know It Better To Do It BetterDocument6 pagesECE - Know It Better To Do It BettermpssassygirlNo ratings yet
- Lab0 PDFDocument6 pagesLab0 PDFmpssassygirlNo ratings yet
- Continuity Equation in Cartesian Coordinate Continuity Equation in Cartesian CoordinateDocument7 pagesContinuity Equation in Cartesian Coordinate Continuity Equation in Cartesian CoordinatempssassygirlNo ratings yet
- XX Yy ZZ RR RR RR RR RR RR RR RR RR R+ R+ RR RR RR RR RR RR RR RRDocument20 pagesXX Yy ZZ RR RR RR RR RR RR RR RR RR R+ R+ RR RR RR RR RR RR RR RRmpssassygirlNo ratings yet
- Transfer Process: Course ContentDocument10 pagesTransfer Process: Course ContentmpssassygirlNo ratings yet
- ILC Flexible Link RobotDocument60 pagesILC Flexible Link RobotmpssassygirlNo ratings yet
- BSC 1Document19 pagesBSC 1mpssassygirlNo ratings yet
- ILC Flexible Link RobotDocument60 pagesILC Flexible Link RobotmpssassygirlNo ratings yet
- BSPII Ch3 Filtering Time 2008Document15 pagesBSPII Ch3 Filtering Time 2008mpssassygirlNo ratings yet
- Resource Requirement and AllocationDocument26 pagesResource Requirement and AllocationSujesh VijayanNo ratings yet
- Control SystemDocument16 pagesControl SystemChuThếHuânNo ratings yet
- Flexible Manufacturing Systems (S1-15 - EAZC412) - CHDocument20 pagesFlexible Manufacturing Systems (S1-15 - EAZC412) - CHymsyaseenNo ratings yet
- Soft Computing SYLLABUSDocument2 pagesSoft Computing SYLLABUSgfdxgxgnxNo ratings yet
- Se QBDocument6 pagesSe QBpriyajv14No ratings yet
- Ga Matlab ToolDocument3 pagesGa Matlab Toolकुँवर रुपेन्र्द प्रताप सिंह हाड़ाNo ratings yet
- Data IntegrationDocument20 pagesData IntegrationSivam ChinnaNo ratings yet
- Day 2.1 - Requirement ProcessDocument26 pagesDay 2.1 - Requirement Processvthh94No ratings yet
- Process Monitoring NonconformityDocument160 pagesProcess Monitoring Nonconformityshobha shelarNo ratings yet
- Test Bank For Systems Analysis and Design 3rd Edition DennisDocument16 pagesTest Bank For Systems Analysis and Design 3rd Edition Dennisamandapowellxopmeycdwa100% (23)
- Chen 3005 Process Instrumentation and ControlDocument13 pagesChen 3005 Process Instrumentation and ControlAhZaiSkyNo ratings yet
- AI Agent ArchitecturesDocument12 pagesAI Agent ArchitecturesRakshith SNo ratings yet
- Bab 1 Kedaulatan NegaraDocument16 pagesBab 1 Kedaulatan NegaraRishaan Thasann Mohan ThasanNo ratings yet
- CTFL 4.0 Sample Exam3 2 QuestionsDocument13 pagesCTFL 4.0 Sample Exam3 2 QuestionsMina RaafatNo ratings yet
- Calculating Heat Transfer and Temperature ChangesDocument22 pagesCalculating Heat Transfer and Temperature ChangesnallilathaNo ratings yet
- Unit1 EvidDocument8 pagesUnit1 EvidJesse VincentNo ratings yet
- Introduction To Process ControlDocument24 pagesIntroduction To Process ControlAbdelrahman GadallahNo ratings yet
- Introduction to Mechatronics SystemsDocument27 pagesIntroduction to Mechatronics SystemsYuneo NurcahyaNo ratings yet
- SDLC 1Document24 pagesSDLC 1Kochappen Ipe KumarNo ratings yet
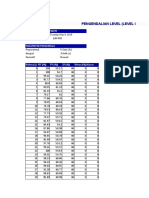
- Pengendalian Level (Level Control) : Pelaksanaan PraktikumDocument7 pagesPengendalian Level (Level Control) : Pelaksanaan Praktikumdela cahyaNo ratings yet
- Ivar J. Halvorsen and Sigurd SkogestadDocument19 pagesIvar J. Halvorsen and Sigurd SkogestadCHANADASNo ratings yet
- Niklas Luhmann - Social Systems (1996)Document276 pagesNiklas Luhmann - Social Systems (1996)Daniel Burnfin100% (4)
- Essay Questions Topic 2Document2 pagesEssay Questions Topic 2Michael SmithNo ratings yet
- Molding Department Equivalent Production Computations Month of June MaterialsDocument5 pagesMolding Department Equivalent Production Computations Month of June MaterialsGwyneth Jhane Ybañez LibosadaNo ratings yet
- Building HVAC Control Systems - Role of Controls and OptimizationDocument6 pagesBuilding HVAC Control Systems - Role of Controls and OptimizationMohammad Hafiz OthmanNo ratings yet
- Modeling and Control of A Rotary Inverted PendulumDocument6 pagesModeling and Control of A Rotary Inverted PendulumsalmanNo ratings yet
- Me6301 Engineering Thermodynamics L T P CDocument2 pagesMe6301 Engineering Thermodynamics L T P CHariharan HariNo ratings yet
- 자율운항선박 기술개발사업Document270 pages자율운항선박 기술개발사업강윤모No ratings yet
- Module THERMO Thermodynamics BEXET 2 BSIT RACT X BMET MT 2 OKDocument124 pagesModule THERMO Thermodynamics BEXET 2 BSIT RACT X BMET MT 2 OKHiraishin JutsuNo ratings yet
- Graphical Thermodynamics and Ideal Gas Power CyclesDocument91 pagesGraphical Thermodynamics and Ideal Gas Power CyclesCharleneKronstedtNo ratings yet
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366From EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366No ratings yet
- CCST Cisco Certified Support Technician Study Guide: Networking ExamFrom EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamNo ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet