You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- T225RS User Manual: WarningDocument4 pagesT225RS User Manual: WarningSimon CooperNo ratings yet
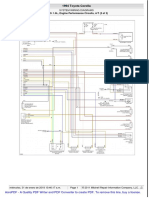
- 1994 Toyota Corolla 1994 Toyota CorollaDocument1 page1994 Toyota Corolla 1994 Toyota CorollaAngie CamargoNo ratings yet
- 1:3 SCALE 2830MM NIEUPORT 28 laser cut balsa kit BUILDING INSTRUCTIONDocument41 pages1:3 SCALE 2830MM NIEUPORT 28 laser cut balsa kit BUILDING INSTRUCTIONBert BaradasNo ratings yet
- U241 DSLDocument5 pagesU241 DSLu.walczewskaNo ratings yet
- Orion Owners ManualDocument16 pagesOrion Owners Manualolivier.bigouretNo ratings yet
- Name Question Text Option 1 Option 2 Option 3 Option 4 Correct OptionDocument18 pagesName Question Text Option 1 Option 2 Option 3 Option 4 Correct OptionrashmiameNo ratings yet
- Stanley 25 Amp Automatic Battery Charger BC25BS ManualDocument12 pagesStanley 25 Amp Automatic Battery Charger BC25BS ManualJoe ZhaoNo ratings yet
- Notes of Combustion Chamber PDFDocument4 pagesNotes of Combustion Chamber PDFbhushan m dusaneNo ratings yet
- Ficha Técnica Cat FDA0 - SAE 50 & 60 - Technical DatasheetDocument2 pagesFicha Técnica Cat FDA0 - SAE 50 & 60 - Technical DatasheetRhuanNo ratings yet
- Construction EquipmentDocument11 pagesConstruction EquipmentSÓLIDA ESTRUTURAS PREMOLDADAS LTDANo ratings yet
- C1 - 중국- 철강 홍보자료 - EDM - 4급 - v0.1Document62 pagesC1 - 중국- 철강 홍보자료 - EDM - 4급 - v0.1Vinh Chu VănNo ratings yet
- SSPB4343: (In United States)Document19 pagesSSPB4343: (In United States)SIVASANGKARY MUNIANDYNo ratings yet
- Hydrotech Pump Proposal SummaryDocument50 pagesHydrotech Pump Proposal SummaryHisham ElsayedNo ratings yet
- Terrano: GI MA EM LC EC FE CL MT AT TF PD FA RA BR ST RS BT HA SC EL IDXDocument2 pagesTerrano: GI MA EM LC EC FE CL MT AT TF PD FA RA BR ST RS BT HA SC EL IDXChew LayNo ratings yet
- FiltersDocument5 pagesFiltersHaianh ChauNo ratings yet
- K20 Engine Control Module X1 (Lsa) Document ID# 4094179Document3 pagesK20 Engine Control Module X1 (Lsa) Document ID# 4094179Data TécnicaNo ratings yet
- PC450LC 8Document1,031 pagesPC450LC 8Ernesto Ordonez Paniagua67% (3)
- Quick Flex BrochureDocument6 pagesQuick Flex Brochurevictormtz4146No ratings yet
- Honda Rebel Cmx250 Manual 85-87Document206 pagesHonda Rebel Cmx250 Manual 85-87galNo ratings yet
- LIST OF OFFICEWISE TPA - March 2020Document96 pagesLIST OF OFFICEWISE TPA - March 2020Satyam PatelNo ratings yet
- Teileliste - Intek 50 - 124682011501Document27 pagesTeileliste - Intek 50 - 124682011501ThorbenWegenerweb.deNo ratings yet
- Springride Air Bellows PDFDocument123 pagesSpringride Air Bellows PDFMichael AkhramovichNo ratings yet
- Massey Ferguson MF 175 TRACTORS (GB) Service Parts Catalogue ManualDocument15 pagesMassey Ferguson MF 175 TRACTORS (GB) Service Parts Catalogue Manualbvk2980022No ratings yet
- Vag Commander User ManualDocument59 pagesVag Commander User Manualrumellemur59No ratings yet
- Owner's Manual: Steering Damper Road & TrackDocument8 pagesOwner's Manual: Steering Damper Road & TrackEirik JonhNo ratings yet
- Maintenance Checklist Shekar AugerDocument1 pageMaintenance Checklist Shekar Augershamsheer ikramNo ratings yet
- RV-RVR: Technical CatalogueDocument24 pagesRV-RVR: Technical CatalogueBruno ReisNo ratings yet
- 37米泵车图册(英)37M TRUCK PUMP PARTS CATALOGUE) PDFDocument179 pages37米泵车图册(英)37M TRUCK PUMP PARTS CATALOGUE) PDFAbderrahim BoutabbaNo ratings yet
- Instruction for CC12-4.9/1.5/0.5 12MW Steam Extraction TurbineDocument24 pagesInstruction for CC12-4.9/1.5/0.5 12MW Steam Extraction TurbineMUBASHIR ASLAMNo ratings yet
- Cost and Management Accounting Analysis of Mahindra GroupDocument30 pagesCost and Management Accounting Analysis of Mahindra GroupSaloni Jain 1820343No ratings yet