You might also like
- Datasheet 2Document11 pagesDatasheet 2kumped asemNo ratings yet
- TLC555CPDocument20 pagesTLC555CPmadindeheadNo ratings yet
- Microcontroller circuit with USB interfaceDocument1 pageMicrocontroller circuit with USB interfaceWagner Gómez100% (1)
- VL393T2863M E6sDocument10 pagesVL393T2863M E6sNguyễn Công CườngNo ratings yet
- 170 3 092971 MB40528Document14 pages170 3 092971 MB40528Umum Cupang CupangNo ratings yet
- Module Description DM15-A-6U 2.01Document7 pagesModule Description DM15-A-6U 2.01felipebdNo ratings yet
- TCD1103GFG-Rev2-090115 DatasheetDocument17 pagesTCD1103GFG-Rev2-090115 DatasheetbocarocaNo ratings yet
- bd8389fv M eDocument21 pagesbd8389fv M eNicrostNo ratings yet
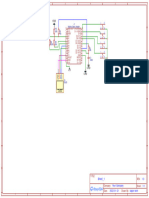
- Schematic Ardu Oscilloscope 2022-01-21 Kes1kt9bmpDocument1 pageSchematic Ardu Oscilloscope 2022-01-21 Kes1kt9bmpinsincos administrativoNo ratings yet
- 7 A H-Bridge For DC-Motor Applications TLE 7209-2R: Final DatasheetDocument32 pages7 A H-Bridge For DC-Motor Applications TLE 7209-2R: Final DatasheetMecaSoftwareNo ratings yet
- Arduino TempDocument1 pageArduino TempSebastian LopezNo ratings yet
- D D D D D D D D D D D D: TLV5618A 2.7-V TO 5.5-V LOW-POWER DUAL 12-BIT Digital-To-Analog Converter With Power DownDocument23 pagesD D D D D D D D D D D D: TLV5618A 2.7-V TO 5.5-V LOW-POWER DUAL 12-BIT Digital-To-Analog Converter With Power DownJulio Rafael GamboaNo ratings yet
- Dac & AdcDocument17 pagesDac & AdcHasiburNo ratings yet
- 10-Bit, 40Msps, 3.0V, Low-Power ADC With Internal Reference: General Description FeaturesDocument20 pages10-Bit, 40Msps, 3.0V, Low-Power ADC With Internal Reference: General Description FeaturesRobNo ratings yet
- Si5933DC Dual P-Channel 1.8-V (G-S) MOSFET: Vishay SiliconixDocument5 pagesSi5933DC Dual P-Channel 1.8-V (G-S) MOSFET: Vishay SiliconixfroufouNo ratings yet
- FDMS3600S FairchildSemiconductorDocument16 pagesFDMS3600S FairchildSemiconductorvinuNo ratings yet
- ADC 4-20 v1.2 EN PDFDocument1 pageADC 4-20 v1.2 EN PDFabhe prasetyaNo ratings yet
- ADC 4-20 v1.2 ENDocument1 pageADC 4-20 v1.2 ENsaravananNo ratings yet
- ADC 4-20 v1.2 EN PDFDocument1 pageADC 4-20 v1.2 EN PDFFernando Vinícius G. MagroNo ratings yet
- ADC 4-20 v1.2 EN PDFDocument1 pageADC 4-20 v1.2 EN PDFFernando Vinícius G. MagroNo ratings yet
- Micro-Power Voltage Detectors: Features General DescriptionDocument13 pagesMicro-Power Voltage Detectors: Features General DescriptionHenryRamirezNo ratings yet
- 7 A H-Bridge For DC-Motor Applications 30348: Preliminary DatasheetDocument4 pages7 A H-Bridge For DC-Motor Applications 30348: Preliminary DatasheetallisonNo ratings yet
- TCD1254GFG CCD Image Sensor SpecsDocument17 pagesTCD1254GFG CCD Image Sensor SpecsbocarocaNo ratings yet
- Quad 2-Input NAND Buffer: Integrated CircuitsDocument8 pagesQuad 2-Input NAND Buffer: Integrated CircuitsMarco AndresNo ratings yet
- Pdtc114ee, Pdtc114em, Pdtc114et, Pdtc114eu NXPDocument17 pagesPdtc114ee, Pdtc114em, Pdtc114et, Pdtc114eu NXPTrieeNo ratings yet
- A2C33648Document27 pagesA2C33648mohhizbar100% (1)
- TDI TDO ISP Connector Target Device Target SystemDocument2 pagesTDI TDO ISP Connector Target Device Target SystembrahimNo ratings yet
- D D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDocument22 pagesD D D D D D D D D D D D D D D D: SN75ALS170, SN75ALS170A Triple Differential Bus TransceiverDedii KurniawanNo ratings yet
- Dial-Up Modem For Slc500 Operation Application Note # 6 ModemDocument4 pagesDial-Up Modem For Slc500 Operation Application Note # 6 Modemshawky2010No ratings yet
- TLC 372Document28 pagesTLC 372petruNo ratings yet
- Tlc372 Lincmos Dual Differential ComparatorsDocument22 pagesTlc372 Lincmos Dual Differential Comparatorsbaxther2010No ratings yet
- sn74hc151 DatasheetDocument21 pagessn74hc151 DatasheetEzra de GraafNo ratings yet
- RS-422 Splitter PDFDocument1 pageRS-422 Splitter PDFNisar AhmedNo ratings yet
- Rs-422 Splitter Circuit DiagramDocument1 pageRs-422 Splitter Circuit DiagramNisar AhmedNo ratings yet
- tlc7524 - 8bit DACDocument22 pagestlc7524 - 8bit DAC40818248No ratings yet
- D D D D D D D: DescriptionDocument26 pagesD D D D D D D: DescriptionsirosNo ratings yet
- D D D D D D D D D D: DescriptionDocument25 pagesD D D D D D D D D D: DescriptionSofywka SofaNo ratings yet
- Schematic PrintsDocument1 pageSchematic Printsthong lyNo ratings yet
- e1750312-ae8c-45db-a900-3c6654649b75Document1 pagee1750312-ae8c-45db-a900-3c6654649b75Ujjwal HiredesaiNo ratings yet
- Fsa1153 Dp3T Usb Type C Audio Anduart Analog Switch With OvpDocument11 pagesFsa1153 Dp3T Usb Type C Audio Anduart Analog Switch With OvpDreavus HashirobiNo ratings yet
- Decodificador MC74HC147 MotorolaDocument5 pagesDecodificador MC74HC147 MotorolaAdrian PelaezNo ratings yet
- PD16732A, 16732B: Mos Integrated CircuitDocument24 pagesPD16732A, 16732B: Mos Integrated CircuitAnika HernandezNo ratings yet
- PDTA114E Series: 1. Product ProfileDocument17 pagesPDTA114E Series: 1. Product ProfileGian MontillaNo ratings yet
- HL1606 DatasheetDocument6 pagesHL1606 Datasheetsushant bakhunchheNo ratings yet
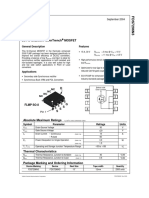
- FDS7296N3 - 30V N-Channel PowerTrench MOSFETDocument7 pagesFDS7296N3 - 30V N-Channel PowerTrench MOSFETLangllyNo ratings yet
- Dual D-Type Flip-Flop: Integrated CircuitsDocument8 pagesDual D-Type Flip-Flop: Integrated CircuitsmahaisenNo ratings yet
- PhoenixContact-Current Voltage Transcd MCR-SDocument13 pagesPhoenixContact-Current Voltage Transcd MCR-SSusanto PausinugrohoNo ratings yet
- PDTC144E Series: 1. Product ProfileDocument17 pagesPDTC144E Series: 1. Product ProfileAnkit ShuklaNo ratings yet
- 64-Bit TTL Bipolar RAM, Inverting (3-State) : Integrated CircuitsDocument10 pages64-Bit TTL Bipolar RAM, Inverting (3-State) : Integrated CircuitsEdher Hugo Morales EscobedoNo ratings yet
- Description/ordering Information: 1out 1IN 1IN+ GND V 2out 2IN 2IN+Document18 pagesDescription/ordering Information: 1out 1IN 1IN+ GND V 2out 2IN 2IN+ARSYIAN RIZKI PRATAMANo ratings yet
- EBM LigaçõesDocument6 pagesEBM LigaçõesruisengoNo ratings yet
- General Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosDocument10 pagesGeneral Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosSomendra SinghNo ratings yet
- Schematic - OLED Module - 2022-06-13Document1 pageSchematic - OLED Module - 2022-06-13SURENDRAN R100% (1)
- Arduino Keypad SCHDocument1 pageArduino Keypad SCHthong lyNo ratings yet
- TLC 7524Document30 pagesTLC 7524Arya KrisnaNo ratings yet
- Ne5521 Sa5521 2Document11 pagesNe5521 Sa5521 2José AdelinoNo ratings yet
- General Description Product Summary: 30V Dual Asymmetric N-Channel MOSFETDocument10 pagesGeneral Description Product Summary: 30V Dual Asymmetric N-Channel MOSFETErnesto PuenteNo ratings yet
- 74 HC 20Document20 pages74 HC 20Ezequiel AriasNo ratings yet
- Dropsa.c1060ie Feeder Block Series Ag6 67Document2 pagesDropsa.c1060ie Feeder Block Series Ag6 67Abhishek Das100% (1)
- Ati Load Transfer Panel-Lehf3241-02Document2 pagesAti Load Transfer Panel-Lehf3241-02CARLOSNo ratings yet
- Masterguard C Series 10 60kva PDFDocument24 pagesMasterguard C Series 10 60kva PDFErick Hdez100% (1)
- Ap7173 35627Document16 pagesAp7173 35627Jose Barroso GuerraNo ratings yet
- 227 - COMM - Manual - Eng - Mitsubishi MELSEC SeriesDocument29 pages227 - COMM - Manual - Eng - Mitsubishi MELSEC SeriesPhuocauto CncNo ratings yet
- Calculation Slewing BearingsDocument12 pagesCalculation Slewing Bearingsbennyferguson100% (1)
- Tutorials For STM32F103RB: Nicolas BarbotDocument13 pagesTutorials For STM32F103RB: Nicolas BarbotcarNo ratings yet
- Analog 4-Wire Video Intercom: Quick Start GuideDocument16 pagesAnalog 4-Wire Video Intercom: Quick Start GuideJUAN GUERRANo ratings yet
- Ej800clfph - W800 Cafe 2019-20 PDFDocument89 pagesEj800clfph - W800 Cafe 2019-20 PDFAlbert DepanoNo ratings yet
- Dieselec Doosan DD-625 KVADocument4 pagesDieselec Doosan DD-625 KVAJay Tolentino100% (1)
- Machine Drawing MID-I PAPERS - 2 SETS - AY 2020-2021 - II-IDocument2 pagesMachine Drawing MID-I PAPERS - 2 SETS - AY 2020-2021 - II-Ivenkee84No ratings yet
- Whirpool UputstvoDocument38 pagesWhirpool Uputstvokemal50No ratings yet
- E6855 - Add Rev01Document8 pagesE6855 - Add Rev01chris110No ratings yet
- Double Acting Hacksaw Using Scotch Yoke Mechanism: Project Report 2016Document38 pagesDouble Acting Hacksaw Using Scotch Yoke Mechanism: Project Report 2016JEFFRY ANTO PRAKASH VNo ratings yet
- Installation Maintenance of Water Heater - ST - Updated PDFDocument17 pagesInstallation Maintenance of Water Heater - ST - Updated PDFHong Leong KuNo ratings yet
- Installation Manual-Volume 1 PDFDocument449 pagesInstallation Manual-Volume 1 PDFSajadShaykhanNo ratings yet
- Perkins 20 Kva (404a-22g1)Document2 pagesPerkins 20 Kva (404a-22g1)RavaelNo ratings yet
- Euro Ref SitesDocument21 pagesEuro Ref Sitesjaykrit20009389No ratings yet
- Sense Point XCD Technical ManualDocument80 pagesSense Point XCD Technical ManualKarina Jimenez VegaNo ratings yet
- NB Grundfosliterature-145819 PDFDocument222 pagesNB Grundfosliterature-145819 PDFToàn Lê HuyNo ratings yet
- Accessories: Workshop ManualDocument14 pagesAccessories: Workshop ManualDblogic GatesNo ratings yet
- Ford 5R55N: Click On Part Numbers For Product Details or VisitDocument1 pageFord 5R55N: Click On Part Numbers For Product Details or VisitJefithoCortezNo ratings yet
- Replacing MechatronicsDocument7 pagesReplacing MechatronicsNenad VlašičekNo ratings yet
- Suzuki Jimny Flyer FinalDocument2 pagesSuzuki Jimny Flyer FinalZeeshan0% (1)
- Draft Version: D104/D106 Parts CatalogDocument125 pagesDraft Version: D104/D106 Parts CatalogHigor CunhaNo ratings yet
- Rotulado FotovoltaicasDocument1 pageRotulado FotovoltaicasMauricio GalloNo ratings yet
- Vito Part1Document97 pagesVito Part1Rezme Mbarek100% (1)
- Pre-Operative Check Up of Farm Tools and EquipmentDocument13 pagesPre-Operative Check Up of Farm Tools and EquipmentJhonjie Fe MonteNo ratings yet
- M24256-BW M24256-BR M24256-BF M24256-DR M24256-DF: 256-Kbit Serial I C Bus EEPROMDocument47 pagesM24256-BW M24256-BR M24256-BF M24256-DR M24256-DF: 256-Kbit Serial I C Bus EEPROMNguyễn Thế MạnhNo ratings yet
- NEE - 602 Switchgear and Protection: Unit I: Introduction To Protection SystemDocument24 pagesNEE - 602 Switchgear and Protection: Unit I: Introduction To Protection SystemmandhirNo ratings yet