You might also like
- Pulse Width Modulated Control of PVEA/M/H/S: T T Cycle DutyDocument5 pagesPulse Width Modulated Control of PVEA/M/H/S: T T Cycle DutyerosNo ratings yet
- Technical Note on Constant Current Source for Fujikura Pressure SensorsDocument14 pagesTechnical Note on Constant Current Source for Fujikura Pressure SensorsIsrrael Caceres MNo ratings yet
- Ame5269 AmeDocument18 pagesAme5269 AmeCharles PNo ratings yet
- Bd9g341aefj LBDocument30 pagesBd9g341aefj LBFantazsta White Trash.No ratings yet
- EE 419 Lab #5 Instrumentation AmplifierDocument3 pagesEE 419 Lab #5 Instrumentation AmplifierNisha Kotyan G RNo ratings yet
- Advanced Power Electronics Corp.: APE1117ADocument9 pagesAdvanced Power Electronics Corp.: APE1117APetr ggaNo ratings yet
- AV 800 amplifier power supply guideDocument12 pagesAV 800 amplifier power supply guideGerardo Contreras SaenzNo ratings yet
- LM391 Audio Power Driver: General Description FeaturesDocument12 pagesLM391 Audio Power Driver: General Description Featuresdhirajmore88No ratings yet
- Introduction To AmplifiersDocument25 pagesIntroduction To Amplifiersrahul prasadNo ratings yet
- Op Amp StabilityDocument32 pagesOp Amp Stabilityapdim79No ratings yet
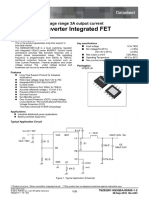
- A5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterDocument16 pagesA5268 3A, 28V, 340Khz Synchronous Rectified Step-Down ConverterAnderson Galarza CalderonNo ratings yet
- 800w Rms Mosfet AmplifierDocument12 pages800w Rms Mosfet AmplifierpraveenNo ratings yet
- Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var TransducerDocument2 pagesWatt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var Transducer Watt / Var TransducerAdam SatrioNo ratings yet
- Opamp TIDocument5 pagesOpamp TIAmogh Gajaré100% (1)
- LM - 390Document8 pagesLM - 390marcelo giussaniNo ratings yet
- Adjustable Reference Voltage CircuitDocument4 pagesAdjustable Reference Voltage CircuitThieplo BertolaNo ratings yet
- LM - 391 PDFDocument14 pagesLM - 391 PDFDaniel Arcia JiménezNo ratings yet
- LM - 388Document10 pagesLM - 388marcelo giussaniNo ratings yet
- Electronic Instrumentation: Experiment 4Document63 pagesElectronic Instrumentation: Experiment 4helenarajNo ratings yet
- Dsa 007482Document14 pagesDsa 007482AmirNo ratings yet
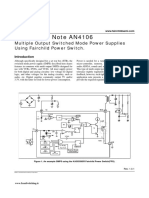
- An 4106 Multiple Output Smps Using Fairchild Power Switch Ic WWW - Iranswitching.irDocument14 pagesAn 4106 Multiple Output Smps Using Fairchild Power Switch Ic WWW - Iranswitching.irJuan Carlos GarcíaNo ratings yet
- Operational Amplifiers: Chapter-1Document45 pagesOperational Amplifiers: Chapter-1meseret sisayNo ratings yet
- (Top View) : OP Amp SO-8Document8 pages(Top View) : OP Amp SO-8eduardskNo ratings yet
- T2117 Zero-Voltage Switch With Adjustable Ramp PDFDocument16 pagesT2117 Zero-Voltage Switch With Adjustable Ramp PDFnenadNo ratings yet
- SR30100LCT, SRF30100LCT, SR30100LD1: Low VF Schottky Barrier RectifierDocument4 pagesSR30100LCT, SRF30100LCT, SR30100LD1: Low VF Schottky Barrier Rectifierblue.gipsy blue.gipsyNo ratings yet
- Vs-Stps1045Bpbf: Vishay SemiconductorsDocument7 pagesVs-Stps1045Bpbf: Vishay SemiconductorsAzimedNo ratings yet
- ECE3204 D2013 Lab 6 Stability: Differentiator Stability: Wien Bridge Oscillator Automatic Gain Control (AGC) ObjectiveDocument10 pagesECE3204 D2013 Lab 6 Stability: Differentiator Stability: Wien Bridge Oscillator Automatic Gain Control (AGC) ObjectiveIsai SanchezNo ratings yet
- FFB 2907 - FairchildDocument13 pagesFFB 2907 - FairchildStevenNo ratings yet
- Data Sheet Amplificador AudioDocument8 pagesData Sheet Amplificador AudiosebasvNo ratings yet
- Power Supply BoardDocument2 pagesPower Supply BoardciohaniNo ratings yet
- AN-1581 Application Note: High Speed Instrumentation Amplifier Using The Difference Amplifier and The JFET Input Op AmpDocument4 pagesAN-1581 Application Note: High Speed Instrumentation Amplifier Using The Difference Amplifier and The JFET Input Op AmpAbolfazl Yousef ZamanianNo ratings yet
- 22W Car Radio Power Amplifier IC with Integrated Class-B OutputDocument11 pages22W Car Radio Power Amplifier IC with Integrated Class-B OutputamdatiNo ratings yet
- LM2005 Amplificator BassDocument8 pagesLM2005 Amplificator BassAlex MartonNo ratings yet
- SJPW-T4-Sanken Diodo de DronDocument6 pagesSJPW-T4-Sanken Diodo de DronIvan ZuñigaNo ratings yet
- KA1L0380RDocument12 pagesKA1L0380Radisurya13.afNo ratings yet
- KA1L0380B/KA1L0380RB/KA1M0380RB/ KA1H0380RB: Fairchild Power Switch (SPS)Document12 pagesKA1L0380B/KA1L0380RB/KA1M0380RB/ KA1H0380RB: Fairchild Power Switch (SPS)Saad LehlouNo ratings yet
- Sboa 268 ADocument5 pagesSboa 268 AtimotheemokumaNo ratings yet
- Ref 012 FCDocument8 pagesRef 012 FCأحمد زغارىNo ratings yet
- Half Controlled Bridge Converter ExperimentDocument4 pagesHalf Controlled Bridge Converter ExperimentAbdullah MohammedNo ratings yet
- XL2596 enDocument16 pagesXL2596 enSelman ÇORANo ratings yet
- an-116Document4 pagesan-116eesaadrhemanNo ratings yet
- 2A 23V Synchronous Buck Converter: General DescriptionDocument15 pages2A 23V Synchronous Buck Converter: General DescriptionmoftahNo ratings yet
- 2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsDocument6 pages2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsElectronicos CaldasNo ratings yet
- 2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsDocument7 pages2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsAndres TrujilloNo ratings yet
- 2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsDocument7 pages2SA1943/FJL4215 PNP Epitaxial Silicon Transistor: ApplicationsJesus RondonNo ratings yet
- Generator Automatic Voltage Regulator Operation ManualDocument4 pagesGenerator Automatic Voltage Regulator Operation ManualmusafirNo ratings yet
- LM5030 Application: DC - DC Converter Utilizing The Push-Pull TopologyDocument10 pagesLM5030 Application: DC - DC Converter Utilizing The Push-Pull TopologyEdoardoNo ratings yet
- LT 1210Document20 pagesLT 1210mechiqcrpdNo ratings yet
- LPF Experiment AICDocument2 pagesLPF Experiment AICAryanSinghNo ratings yet
- SPS Ka1m0880: To-3p-5lDocument8 pagesSPS Ka1m0880: To-3p-5lAndrzej WojtalaNo ratings yet
- Ka1m0880b DatasheetDocument8 pagesKa1m0880b DatasheetluisNo ratings yet
- Cap 2Document8 pagesCap 2pietisc pietiscNo ratings yet
- KA5x03xx-SERIES: KA5H0365R, KA5M0365R, KA5L0365R KA5H0380R, KA5M0380R, KA5L0380R Fairchild Power Switch (FPS)Document14 pagesKA5x03xx-SERIES: KA5H0365R, KA5M0365R, KA5L0365R KA5H0380R, KA5M0380R, KA5L0380R Fairchild Power Switch (FPS)Bidu BiduNo ratings yet
- Sboa 247Document5 pagesSboa 247Surafel DestawNo ratings yet
- OP-AMP comparator and Schmitt trigger circuitsDocument3 pagesOP-AMP comparator and Schmitt trigger circuits24-VICKY PAWARNo ratings yet
- Power Logic Level Mosfets N-Channel Logic Level Power Field-Effect Transistors (L Fet)Document2 pagesPower Logic Level Mosfets N-Channel Logic Level Power Field-Effect Transistors (L Fet)Thaynar BarbosaNo ratings yet
- Lm358 ApplicationDocument4 pagesLm358 Applicationthienthuy232No ratings yet
- Service Codes Display Monitor (S.N. 910056-951253)Document3 pagesService Codes Display Monitor (S.N. 910056-951253)yamilmr60% (5)
- Study On Leakage Current Characteristics and Computer Simulation of Semiconducting Glazed Insulator Under Clean and Salt Fog ConditionDocument4 pagesStudy On Leakage Current Characteristics and Computer Simulation of Semiconducting Glazed Insulator Under Clean and Salt Fog ConditionKamello Assis100% (1)
- Calibration 161217162207Document36 pagesCalibration 161217162207Oula HatahetNo ratings yet
- 4315 ManualDocument3 pages4315 Manualma.betraNo ratings yet
- DXX-1710-2690/1710-2690-65/65-18i/18i-M/M: Electrical PropertiesDocument2 pagesDXX-1710-2690/1710-2690-65/65-18i/18i-M/M: Electrical PropertiesBeto CostaNo ratings yet
- Cylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsDocument2 pagesCylindrical Proximity Magnetic Sensors for Detection of Ferrous TargetsTenuka pereraNo ratings yet
- Manual Instalare INIM SmartLine PDFDocument72 pagesManual Instalare INIM SmartLine PDFcristytrs787878No ratings yet
- Resume R DeshpandeDocument7 pagesResume R DeshpanderaghvendraprasadNo ratings yet
- Terminal Markings For Contactors and RelaysDocument12 pagesTerminal Markings For Contactors and RelaysPelmus Liviu100% (1)
- Apostila CLP Omrom BRDocument671 pagesApostila CLP Omrom BRreinaldopf2011No ratings yet
- Semiconductor Device CalculationsDocument37 pagesSemiconductor Device Calculationsbhasin_hemantNo ratings yet
- 500 GTP 1180Document2 pages500 GTP 1180mahidhar talapaneniNo ratings yet
- St. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2Document24 pagesSt. Andrew's Junior College JC2 2015 Preliminary Exam Physics Paper 2VarshLokNo ratings yet
- PA-2 Circuit Diagram and Parts ListDocument8 pagesPA-2 Circuit Diagram and Parts Listfazenda sao gabrielNo ratings yet
- Semiconductor DevicesDocument524 pagesSemiconductor Devicesapuinwork100% (1)
- Group 3 Section (H) (Lab Report 2)Document8 pagesGroup 3 Section (H) (Lab Report 2)Shoaib KhanNo ratings yet
- BLDC MotorDocument2 pagesBLDC MotorSowbi KapilrajNo ratings yet
- EMI Emission From Gate Drive Circuit of Boost Converter: Guang Ling, Henglin ChenDocument5 pagesEMI Emission From Gate Drive Circuit of Boost Converter: Guang Ling, Henglin Chenkeerthi_1989No ratings yet
- Cryo EMDocument36 pagesCryo EMAndy BlackNo ratings yet
- 901 1000e-1 PDFDocument52 pages901 1000e-1 PDFVladoNo ratings yet
- POE16S-1AFG Extends PoE Range to 200mDocument3 pagesPOE16S-1AFG Extends PoE Range to 200mSubas ShresthaNo ratings yet
- Compiled E105 E111Document36 pagesCompiled E105 E111MingNo ratings yet
- Tutorial 4Document2 pagesTutorial 4Saransh MittalNo ratings yet
- Sevcon Powerpak Trouble Shooting Guid 1Document52 pagesSevcon Powerpak Trouble Shooting Guid 1Hector Osorio0% (1)
- Nasa Crimp StandardsDocument114 pagesNasa Crimp StandardsscribdrichyNo ratings yet
- Ts Boost ConverterDocument6 pagesTs Boost Converterala houamNo ratings yet
- Ice Power 250 A DataDocument16 pagesIce Power 250 A Datahenrycervantes4No ratings yet
- 1SDC210201M0201Document3 pages1SDC210201M0201David ZacariasNo ratings yet
- Product Information: Toshiba X-Ray Tube D-0712 / D-0712S / D-0712SB Stationary Anode X-Ray TubeDocument8 pagesProduct Information: Toshiba X-Ray Tube D-0712 / D-0712S / D-0712SB Stationary Anode X-Ray TubeKamilNo ratings yet
- Pololu 3pi Robot User's Guide © 2001-2011 Pololu CorporationDocument68 pagesPololu 3pi Robot User's Guide © 2001-2011 Pololu CorporationMarcos LimaNo ratings yet