You might also like
- 04an DakotaDocument431 pages04an DakotaMarcelo Tapia Maureira100% (1)
- Engine Build SheetDocument2 pagesEngine Build SheetMarcelo Tapia MaureiraNo ratings yet
- AccessTUNER Calibration & Tuning Guide Worksheet For Subarus v2.07Document8 pagesAccessTUNER Calibration & Tuning Guide Worksheet For Subarus v2.07Marcelo Tapia MaureiraNo ratings yet
- Planilla General Remate 10-11-1Document9 pagesPlanilla General Remate 10-11-1Marcelo Tapia MaureiraNo ratings yet
- Basic 2 Stroke TuningDocument6 pagesBasic 2 Stroke TuningMarcelo Tapia MaureiraNo ratings yet
- Controller Models PL800, PL1600i PL1600, PL1620, PL1624, PL4800 Owner's ManualDocument28 pagesController Models PL800, PL1600i PL1600, PL1620, PL1624, PL4800 Owner's ManualMarcelo Tapia Maureira100% (1)
- TurbochargersDocument193 pagesTurbochargersGato Richy95% (22)
- HolyCrapItsFast TuningGuide PDFDocument50 pagesHolyCrapItsFast TuningGuide PDFMarcelo Tapia Maureira100% (3)
- MAF Scalling Using RomRaider v2.0 PDFDocument18 pagesMAF Scalling Using RomRaider v2.0 PDFMarcelo Tapia MaureiraNo ratings yet
- HolyCrapItsFast TuningGuide PDFDocument50 pagesHolyCrapItsFast TuningGuide PDFMarcelo Tapia Maureira100% (3)
- 04an DakotaDocument431 pages04an DakotaMarcelo Tapia Maureira100% (1)
- Kx500af 07 BuildDocument22 pagesKx500af 07 BuildMarcelo Tapia Maureira0% (1)
- 14 - 06 - Design and Dynamic Behavior of Large Ring Motors For Grinding MillsDocument15 pages14 - 06 - Design and Dynamic Behavior of Large Ring Motors For Grinding MillsMarcelo Tapia MaureiraNo ratings yet
- 2012 Mapla ABBs New Gearless Mill Drive Generation Maintenance Friendly Features Raise Availability PDFDocument10 pages2012 Mapla ABBs New Gearless Mill Drive Generation Maintenance Friendly Features Raise Availability PDFMarcelo Tapia MaureiraNo ratings yet
- Delphi Scan Tool ManualDocument81 pagesDelphi Scan Tool ManualEdgardo Spinelli100% (4)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- COE131 - E01 - Final ExamsDocument6 pagesCOE131 - E01 - Final ExamsBenj MendozaNo ratings yet
- Chemical Process Dynamics and Control SyllabusDocument2 pagesChemical Process Dynamics and Control SyllabusStephen XieNo ratings yet
- GIS A - Data Quality and Accuracy - Lecture4 - Edited05102023Document29 pagesGIS A - Data Quality and Accuracy - Lecture4 - Edited05102023Jecinta wNo ratings yet
- Systems TheoryDocument20 pagesSystems Theoryİbrahim Kurt100% (3)
- Dr. Ambedkar Institute of Technology: Bachelor of Engineering in Industrial Engineering and ManagementDocument4 pagesDr. Ambedkar Institute of Technology: Bachelor of Engineering in Industrial Engineering and ManagementShrinidhi Hegde100% (1)
- Akash KatholeDocument2 pagesAkash Katholeakashkathole74No ratings yet
- Data Modeling and Database Design 2nd Edition Umanath Solutions Manual DownloadDocument16 pagesData Modeling and Database Design 2nd Edition Umanath Solutions Manual DownloadYvone Soto100% (22)
- Meenakshi, Kamal Rawat - Dynamic Programming For Coding Interviews - A Bottom-Up Approach To Problem Solving (2017, Notion Press)Document136 pagesMeenakshi, Kamal Rawat - Dynamic Programming For Coding Interviews - A Bottom-Up Approach To Problem Solving (2017, Notion Press)ApoorvNo ratings yet
- EE428 Industrial Process Control: Dr. Ammar HasanDocument27 pagesEE428 Industrial Process Control: Dr. Ammar HasanUmer ImranNo ratings yet
- Project Management PresentationDocument17 pagesProject Management Presentationbhupesh999No ratings yet
- Knowledge Sharing BKTF PII - NFI - 280921Document33 pagesKnowledge Sharing BKTF PII - NFI - 280921Irfan GunawanNo ratings yet
- SDLC and SE ConceptsDocument99 pagesSDLC and SE ConceptsAnkit ShuklaNo ratings yet
- Lab 19 - Network AnalysisDocument36 pagesLab 19 - Network AnalysisUno de MadridNo ratings yet
- Task Analysis and Human-Computer Interaction: Approaches, Techniques, and Levels of AnalysisDocument9 pagesTask Analysis and Human-Computer Interaction: Approaches, Techniques, and Levels of AnalysisJoseph MuokaNo ratings yet
- LEAN HandoutDocument31 pagesLEAN Handouttri agustariaNo ratings yet
- Hospital Management System For Nyeri County Referral HospitalDocument5 pagesHospital Management System For Nyeri County Referral HospitalPele MpeleNo ratings yet
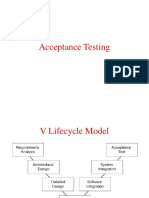
- Acceptance TestingDocument51 pagesAcceptance TestingAuliaRamadhanaNo ratings yet
- Online MCQ Test Object Oriented Analysis and Design MCQ Set 1Document17 pagesOnline MCQ Test Object Oriented Analysis and Design MCQ Set 1saksham agarwalNo ratings yet
- SE GTU Study Material Presentations Unit-7 26092020084508AMDocument19 pagesSE GTU Study Material Presentations Unit-7 26092020084508AMK.B.SNo ratings yet
- Experiment - 01: Denvit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 01: Denvit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Text SummarizerDocument9 pagesText SummarizertypewriterretroNo ratings yet
- Istqb Sampleq&ADocument205 pagesIstqb Sampleq&AAditya BarveNo ratings yet
- MCQ's MCS Evening 3th-ADocument16 pagesMCQ's MCS Evening 3th-AReyhannm mNo ratings yet
- Final System Analysis Exam ModelDocument4 pagesFinal System Analysis Exam Modelsparky00y00No ratings yet
- Agile Project Management - SPR 2223Document28 pagesAgile Project Management - SPR 2223Naila JavaidNo ratings yet
- ABB Power System Voltage StabilityDocument19 pagesABB Power System Voltage StabilityRonald ChavezNo ratings yet
- Chapter 3 Software Process Model-2Document42 pagesChapter 3 Software Process Model-2prasath67No ratings yet
- Static Testing Vs Dynamics TestingDocument4 pagesStatic Testing Vs Dynamics TestingJhanvi PathakNo ratings yet
- The 14 Principles of The Toyota WayDocument4 pagesThe 14 Principles of The Toyota Waybsushma23No ratings yet