JOURNAL OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ WWW.JOURNALOFCOMPUTING.
ORG
67
A Novel Job Rotation Schedule Model Regarding Posture Variety Solving by a Cellular Genetic Algorithm
Hossein Rajabalipour Cheshmehgaz, Habibollah Haron
Abstract Job rotation is a known method that is often used to reduce monotonous workloads on workers with repetitive workstation-based jobs. Changes in a workers body posture can contribute to reduce the monotony; particularly, while there exists none or only minimal external force exertion. The purpose of this research is to develop a method to incorporate posture variety, individually, for each particular body area, into the rotation. This method can increase the possibility of having overall posture variety during work-hours or shift-by-shift for workers. To this end, fuzzy dissimilarity magnitudes between two jobs based on linguistic variables are defined and then used to propose new criteria. According to the criteria, an integerprogramming model for the rotation is developed. Owing to the large search space in which to find a very good solution (approximated optimum solution), a conventional genetic algorithm and a customized cellular genetic algorithm are employed and compared. In addition to being intuitively logical, the algorithms are examined in a simplified test case with six different assembly jobs (performing assigned tasks repetitively), and the results indicate that the cellular genetic algorithm can efficiently find better job rotation schedules to satisfy the criteria. Index Terms Job rotation schedule; Posture variety; Integer programming; Cellular genetic algorithms
1 INTRODUCTION
ob rotation has been introduced as an administrative control mechanism because human resources are a very important factor in most manufacturing industries [1]. Job rotation has always been a key human ergonomic intervention to reduce stresses on workers [2]. In the rotation, the workers are employed in different jobs (or tasks) as long as they have been suitably trained (e.g., cross training); hence, the company has flexibility in different situations. Alongside the general advantages of job rotation, its perceived disadvantages include the lack of cooperation from workers, the expense of cross-training, and the difficulties of evaluating the rotation [3]. Practical job rotation research has been directed towards physical ergonomic and safety factors [1]. Some of the cases include reducing the risk of lower back pain [4], reducing cumulative trauma disorders [3], and minimizing occupational noise exposure [5]. A recent work [6] has suggested a multi-criteria rotation strategy considering physical and mental criteria simultaneously. In spite of many ergonomic interventions, still some workers have to work in an awkward posture because of the repetitively restricted working environment (e.g., assembly lines), and they therefore endure stress to their musculoskeletal system [7]. Furthermore, because of modern technology used in industry and the light but monoto-
nous nature of some work (e.g., light assembly tasks), most conditions in working life, have changed significantly since the pre-industrial period. Insufficient activity in physical tasks is known to have been detrimental short- and longterm effects on health and physical capacity [8-10]. Although, job rotation has been proven to be useful in practice, but there are no definitive guidelines on how the health benefits of a rotation can be evaluated [6]. The effectiveness of the job rotations depends on how well a good rotation strategy is justified and then designed [2]. According to some works [2, 11-12], the severity, risk or magnitude of hazards in jobs (or tasks) or the areas of the workers body that are involved in the jobs should be considered in the strategy to design the rotation in the most beneficial way. However, the most important challenge in the rotation design is still quantification of the level of the severity, risk or hazard resulted from the studying job or task [2]. There are many interacting variables in job rotation, which can affect how effective measuring the level of risk or hazard is [2]. According to the literature, many physical exposure assessments have been developed to measure the level of risk, according to the level of repetition, duration, movement, posture and force/load required in different jobs/tasks [13]. As a part of the job rotation strategy, Carnahan et al. [11] and Tharmmaphornphilas and Norman [14] used Job Stress Index (JSI) assessment [15] to quantify the risk level to the back in their own job rotation strategy. H. Rajabalipour Cheshmehgaz is with the faculty of computer science and Desai et al. [16] have developed a new rotation schedule information systems, Universiti Teknologi Malaysia, 81310, Skudai, Johor, by adapting the results from REBA [17] for both the right Malaysia. H. Haron is with the faculty of computer science and information systems, and left sides of the body. Although REBA usually is used
Universiti Teknologi Malaysia, 81310, Skudai, Johor, Malaysia. 2011 Journal of Computing Press, NY, USA, ISSN 2151-9617 http://sites.google.com/site/journalofcomputing/
JOURNAL OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ WWW.JOURNALOFCOMPUTING.ORG
68
for overall risk assessment, they customized the assessment to a color-coded matrix to help a company's safety and health program generate the job rotation schedule. The program guaranteed schedules with maximum intervals between high-risk tasks in the particular body areas. Diego-Mas et al. [6] have employed 45 measures and criteria to construct job rotation schedules. The criteria used to assign the workers to the jobs were designed to obtain maximum diversification of the jobs carried out during the working hours. The measures of the movements were evaluated by a simple observational method assigning a score to the movement items. In addition to the abovementioned criteria, physical exposure variation has been introduced by Winkel [18-19] . According to the work of Mathiassen and Winkel, a physically varied job could consist of a number of complementary work operations loading different structures and functions of the organism [20]. Having a high level of the variety in load/force, movements, postures, duration and frequency can reduce the risk of jobs [21]. Later, Mathiassen [22] also explained the concepts of diversity and its benefits. Finally, he has emphasized that two complementary aspects, how much and how fast the exposure changes across time, must be considered to evaluate the diversity and variation of a job. A distinctive feature of this work is that the posture variety or diversity is considered in generating the job rotation schedules. First, the magnitude of dissimilarity between two jobs (or tasks) in terms of elevation (angle) and frequency of use of particular body areas (e.g., the right upper arm) are defined. According to these magnitudes, the following objectives are considered in generating the rotation schedule: (i) maximizing the total of the dissimilarity magnitudes among all jobs assigned to the workers during the work hours; and (ii) maximizing the dissimilarity magnitude between two jobs in two consecutive shifts. Although the objectives can also consider with some restrictions such as workers capacities, learning and skills, here, no limitation is considered in this study. In addition, job rotation is a combinational problem [23], and integer programming is a common computing technique to formulate the problem [11, 14]. In this paper, we propose an integer-programming model based on the criteria and the related objectives considered in this paper. On the other hand, the given combinatorial expression for the job rotation scheduling problem has inclined many researchers to use meta-heuristic methods such as genetic algorithms [1]. Because many different rotation schedules have almost the same benefits in the objectives, there is a danger of keeping the genetic algorithm in a specific zone exploring the local optimal solutions, whereas the better rotations are in different the search space. To deal with the effects of locality, a new family of evolutionary algorithms, called cellular genetic algorithms [24], are employed. The rest of paper is structured as follows. The problem
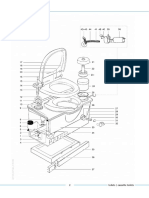
Fig.1. Signals of right upper arm elevations for six different jobs (or 6 assembly tasks)
is described through a simple case in Section 2, and its formulation is followed in Sectione 3. The cellular genetic algorithm used to solve the proposed job rotation model is presented in Section 4, and the results of a comparison with a conventional genetic algorithm are shown in Section 5. The conclusion and further works are addressed in Section 6.
2 PROBLEM DESCRIPTION
Consider a simplified example with six light assembly tasks (i.e., not heavy tasks like manual lifting). Suppose that these repetitive tasks represent six different jobs, and six workers in three shifts (for example, three hours in each shift) are available to be part of the job rotation schedule. We assume that there is no precedence or limitation on the assignment of tasks, which means that any worker can perform the assigned job at any time. The recorded changes in elevation (angle) of the right upper arm (for a typical worker) across time are illustrated in Fig. 1. The angles relative to the line of gravity and movements of the right upper arm can be captured by an inclinometer device (e.g., based on Triaxial accelerometers) [10] at a fixed sampling rate. All samplings are acquired in 400 units of time. The elevation levels range from 0 to 1800. Suppose that we have to assign the jobs among the workers and their shifts in one of two candidate schedules illustrated in Table 1. For simplification, only the rotation schedules for two workers are shown. Roughly, based on Fig. 1, it might be the case that Task 2 and Task 6 are more frequent than others (based on their signal frequencies), and Task 3 and Task 5 are more sustainable at a high level of elevation as compared to the rest (the most elevation levels between 100 and 180). Thus, Worker 1 and Worker 2 have been assigned to more sustainable jobs and more frequent jobs, respectively, through Schedule 1. On the other hand, in Schedule 2, both workers have more variety in their right upper arm use.
JOURNA OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-96 AL 6 617 HTTPS://SITES.GOOGLE.CO OM/SITE/JOURNALOF FCOMPUTING/ WWW.J JOURNALOFCOMPUT TING.ORG
69
TABLE 1
JOB ROTATION SCHED B DULES 1 AND 2
Fig.2. CEVA p plots for all six t tasks (repetitively performed as jobs) presented in F ig. 1
Th hrough the exa ample, even wi equal weig ith ghts assigned to the two parame e eters, elevation and frequenc there are n cy, two d difficulties: (i) calculating th magnitude of the pahe es rameters; and (ii) how the worke must be ass h ers signed based he . on th magnitudes. In the remainder of this section we focus on the compur n, n ting o the posture variety and th frequency of its changes of he o as lon as some erg ng gonomic backg grounds are explained. Di ifferent jobs and workplace have differe levels of es ent the p posture variety and its changes; it is impo y ortant to understa that this variety can be quantified. A wide variety and v w of me ethods ranging from rather simple to more advanced g meth hods are availa able [22]. Sim mple methods include observin the numbe of times per hour that the extremities ng er r e move between cer e rtain angle sec ctors and a ra ather simple idea, counting the motions during a specific period. Sophisti icated approac ches require eq quipment for data acquisid tion. On of the more convenient methods that could specify ne e m c how much and how fast an expo w osure changes across time s been developed by Mathiassen and Winke [20]. Expod el has b sure Variation Ana alysis (EVA) assesses the proportion of a k pted sequence (sequence es work time spent in uninterrup durat tions) within specified expo s osure level cat tegories (exposur intervals) [2 re 22]. He ence, an EVA illustrates how often th exposure A he chang according to the expo ges g osure magnitu ude. In later work Mathiassen has also add ks, n dressed several modifications of EVA. He has proposed a continuous version of d EVA (called CEVA after this) ba A ased on the in nstantaneous rate o change in ex of xposure. In ge eneral, EVA ha been used as for an nalyzing musc activity du cle uring work [20 but some 0], studies have employed EVA for posture reco r ordings [25]. CEVA provides the marginal dis A e stributions of the elevation t levels and the move s ement frequen ncies simultane eously [22]. sessment, CEV could be used to evalVA, u Mathiassens ass arity between jobs. Fig. 2 uate the magnitudes of dissimila rates the use of CEVA for th six assembly tasks meno he y illustr
est. sure levels ar right upper arm re r tioned earlie The expos elevation lev vels. Clearly, the plots rela ated to Task 2 and Task 6 show that these tw tasks are m w wo more frequent tasks than the othe because th have differ ers hey rent rates of ch hange (frequencies) at different e ) elevation levels. In addition, Task 1 and Task 3 are performe at low level of frequency (eleed ls y vation chang rate) in the right upper a ge arm; hence, it c could be concluded that they hav almost the s d ve same frequenc cies.
3 PROBLE MODELING EM G
3.1 Lingust sets and d tic dissimilarity definition y
The overall analysis of th elevation and the frequ he uency are closely r related to hum perspectiv Thus, the u of man ve. use five linguist variable se is appropr tic ets riate [26]. The line guistic valu of these v ues variables are d determined as fols lows:
The mean ning of the li inguistic varia ables is quan ntified over a speci range. As shown in Fig 3, the area o the ific g. of CEVAs plot is divided in overlappin sub-areas u t nto ng under the linguistic sets. Althoug equally overlapping inte c gh ervals have been co onsidered here, other unequ intervals can be ual used depend body area of interest to th job he ding on the b planner. On the plot, M frequency and Max e n Max elevation level are respectiv vely the ma aximum frequ uency (change rate for all tasks (or jobs) and the maximum elee) m vation level considered f a particula body area (e.g., l for ar 180 degrees for the upper arm from th center of gr r he ravity of the body) . Vec lation The DisV matrix is defined, and two accumul vectors, DisV E and DisV F, are defi Vec ined from the mae Vec trix. The ele ements of the matrix (show in Fig. 4) show wn the percenta of the poin (dots in the plot) in the c age nts e corresponding su ub-area.
JOURNAL OF COMPUTING, VO L OLUME 3, ISSUE 6, 2011, ISSN 2151-9617 2 7 HTTPS://S SITES.GOOGLE.COM M/SITE/JOURNALOFC COMPUTING/ WWW.JOU URNALOFCOMPUTIN NG.ORG
70
Fig.4. DisVec ma matrix and two accu umulated vectors Fig.3. An overlapping classification of exposure levels and change n a rates (as frequencies) s
DisV matrices for all the task (or jobs) in Vec f ks nvolved are individ dually calcula ated, and then the accumu n ulated vectors, D DisVecE and Di isVecE, are calculated by sum mming the data in the rows and columns of the matrix, re n d espectively, for Tas j. The vectors are defined as follows. sk d
(1) (2)
Vector (1), fo instance, th value of e5 for Task j or he In V shows the percentag of the samp points from CEVA (in ge ple m a parti icular job) suc that the ele ch evation levels of the ass signed worker rem d main within (o fluctuate within) the or w very h high range. In (2), the value of f 3 shows th percenthe age of the time that the worker ch hanged the exp posure levels in t medium fr the requency (or ch hange rate). Wit these vecto a fuzzy de th ors, efinition of di issimilarity magnit tudes in elev vation level and frequency are proa y posed here. In (3) and (4), the dissimilarity magnitudes a d m betwee Tasks and are define (no matter what body en d ed w area is considered no ow).
Fig.5. The diss similarity values between the six tasks (presente x ed in Figure 1)
our e ix titive jobs), In o illustrative case, with si tasks (repet all the values of the dissimilarity magnitudes in elevation n and fre equency are il llustrated in Fig. 5. In the ba associatar ed wit the dissimil th larity magnitu between Task 1 and ude T the oth hers (top-left), Task 1 has more dissimilarity with Task 3 in elevation whereas it has more di n, issimilarity with T Task 2 and 6 in frequency. In the bar show for Task n n wn 2 (top-middle), Task 2 has more dissimilarity with Task 3 k d w in elev vation as long as Tasks 1, 3, 4 and 5 have almost the same d dissimilarity with Task 2. The interpreta w T ation of the other b bars is analogo ous.
first workstati (consideri that each t ion ing task must be d done in a determin ned workstatio to the nex and so on. The on) xt movement m must be contin nued until the last worker has e been assigned in the last w d workstation a and moved to the first workstat tion [2]. Hend erson [27] has proposed on of s ne plicable policie This policy offers a way to es. y y the most app prevent (or at least to reduce the probab t bility of) assign ning a worker to two stressful tasks (or job in success l bs) sion shifts). (consecutive s In our stud as it regard posture var dy, ds riety, the seque encing criteria inc clude the follo owing. For each w worker and eac body area (e.g., upper ar ch rms, neck, trunk, e etc.): Maximizin the dissim ng milarity magnit tude in eleva ation level betw ween two jobs a assigned to co ontinuous shift ts. Maximizin the dissimi ng ilarity magnit tude in freque ency between tw jobs assign to continu wo ned uous shifts. Maximizin the total o the dissimil ng of larity magnitu udes in elevatio level amon all jobs as on ng ssigned in all the shifts. ng of larity magnitu udes Maximizin the total o the dissimil in frequen among all j ncy jobs assigned in all the shift ts. us umber of criteria will incre ease It is obviou that the nu rapidly as the numbers of body areas, w e workers and sh hifts increase. ergonomics ex xperiments, e each Moreover, based on e body area has convex comb s bination prior rity weighting for g elevation leve and frequen el ncy. In this rese earch, the max ximum latenes (ML) and m ss maximum variety (MV), two ov y verall objectiv are defined to ves, cover all the criteria menti ioned above. T ML objec The ctive
3.2 Cr riteria and ob bjectives for job rotation
The m most important step in the job rotation stra b ategy is the job seq quencing and arranging th jobs for wo he orkers [12]. There are some poss sible ways to determine the sequence. e ple rkers random through mly A simp way is to rotate the wor the job Clearly, th method see bs. his ems too simp plistic to be very u useful. Another method mov the worker from the r ves rs
JOURNA OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-96 AL 6 617 HTTPS://SITES.GOOGLE.CO OM/SITE/JOURNALOF FCOMPUTING/ WWW.J JOURNALOFCOMPUT TING.ORG
71
preve ents situations in which the workers are assigned to s e simila job in two consecutive shifts. Simultan ar neously, the MV o objective incre eases the chance of assign ning tasks to one w worker when these tasks ar more dissim re milar to each other In the next subsection, we present more details r. t m about the objective t es.
TABLE 2 UNITS FOR MAGENTIC PROP PERTIES
3.3 In nteger progr ramming mod del
The m model is concerned with tw main objec wo ctives, called the M and MV objectives. Bo objectives require the ML oth work kers to be assi igned to the jo in shifts to maximize obs t the d dissimilarities defined in the previous sub d e bsection. It is impo ossible to estim mate the best rotation wit only one t th objective function because the dissimilarity is defined y d O based on elevation level and frequency. On the other hand the problem can grow in complexity as more body d, m s areas are consider s red in the rotation. Therefo ore, the dissimila arity must be specialized for each part e ticular body area (e.g., neck, bac left upper arm, etc.), as the problem ck, t o must be formulated according to the entailed complexity. model the prob blem, we propose the follow wing integerTo m progr ramming mod del. Th objectives are defined in an incrementa approach, he a al and w show all the steps in the objective formulation. we t t f Let u begin with terms us h , repre esenting the dissim milarity magn nitudes betwe two tasks assigned to een two s successive shifts of worker in in elevation l level and freq quency, respec ctively, on bod area , as dy prese ented in (5) an (6). Likewise, nd show the t total dissimil larity magnitu udes, on bod area , dy amon the all jobs assigned to worker , in el ng w levation level and freque ency, respe ectively. Tw wo terms, , are also defin ned in (11) an (12). The nd r ary a other complementa formulas are as follows. objective is The second o
(13) (14)
Subject to:
(7) (8) (9)
Then the first objec n ctive is
and,
JOURNAL OF COMPUTING, VO L OLUME 3, ISSUE 6, 2011, ISSN 2151-9617 2 7 HTTPS://S SITES.GOOGLE.COM M/SITE/JOURNALOFC COMPUTING/ WWW.JOU URNALOFCOMPUTIN NG.ORG
72
4 CELLULAR GENETIC AL R LGORITHMS
The size of t the solution search space depends on the number of shi ifts, the numb of workers and jobs, and the ber d number of bo ody areas con nsidered. In ge eneral, finding an g acceptable so olution is a co omplex proble em. Genetic a algore fficient at solv ving this problem. rithms [28] ar especially ef
4.1 GENETIC Algorithms C s
Genetic algori ithms (GAs) a always begin b randomly g by generation of a s et of solution (individuals to the probl ns s) lem, itial populatio All soluti on. ions are assig gned called the ini profit values (fitness value calculated according to obes) on The jectives from the job rotatio schedule. T function that ese he ction. Afterwa ards, calculates the values is th fitness func ns n) d two operation (crossover and mutation are applied to two individu uals selected b a selection operation e by n each time. The rep petitive appli ication of sel lection, crosso over and mutation generates a n n new population of individu uals that inherit th best charac he cteristics of th previous po he opulation. The re egeneration co ontinues until a certain num mber ns erformed, even if the best solun of generation has been pe t or ritetion does not appear in last population, o a specific cr rion is satisfi ied by the po opulation (e.g., having convergence at a sp pecific level). Diego-Mas et al. [6] have imt plemented th operations o selection, cr he of rossover and m mupriately, and in this study, w simply fol n we llow tation approp their method. However, we have change the structur of . e ed re n ess the population and the fitne function.
Fig.6. A 2-dimensiona cellular structu with 3 nodes (cells) with al ure variou radiuses us
Equ uation (7) ind dicates the con nvex combination of the dissim milarities (in elevation level and frequency between y) two jo assigned to Shifts and obs o d of Wor rker that uation (8) calc culates the involve body area . Further, Equ x n e convex combination of the values from the previous equatio for all body areas, and (9) shows the sum of the on ( total d dissimilarity values between all the adja v acent shifts for Wo orker . The first objective ML is ultimat M tely formulated in (10). n Equ uation (13) illu ustrates the co onvex combina ation of the total d dissimilarities (in elevation level and freq l quency) between all the jobs as ssigned to Wo orker consid dering only body a area . Equatio (14) calcula the convex combinaon ates x tion of the values fr f rom (13) in a general view of the all w body areas. Its val lue represents the total di s issimilarity tude that is available for worker . Fi inally, (15) magnit defines the MV objec s ctive. Further, Constrai (16) guaran int ntees that each job in one h s orker. At the same way, s shift is assigned to only one wo Constr raint (17) disp plays the num mber of tasks assigned to a each w worker in one shift that shou not be exceeded. It is uld equal t one, which means each worker has a jo in every to w ob shift. C Constraint (18 indicates the convex co 8) t ombination weight The weight show how much risk, con ts. ts m nsidered in terms of elevation levels or fr requency (frequency of e) re change are considered critical. The weights ar specified in term of the spe ms ecified body areas, such as the neck, a s upper arm, back, etc that are inv c., volved. The we eights may change depending on the capacities of workers (especially e o for dis sabled workers or those with work-related musculos h d al xperiences). Here, all the ca apacities of skeleta disorder ex the w workers (e.g., age, sex, anthropometry and abilities/di isabilities) are supposed to be equal. Con b nstraint (19) also ex xplains the con nvex combination weights. The values of the weights indica the levels of importance of considate e ering t different body areas invo the olved in the ro otation. In g general, the fin step of a jo rotation is to generate nal ob t some s schedules base on some cr ed riteria, e.g., to maximize o the po osture variety/ /diversity am mong all jobs assigned to a each w worker in all the body area considered simultanet as ously. Because it inv volves many workers and many body w m areas ( (e.g., the neck left or right upper arm, tr k, runk, etc.), the mo odel entails a multi-objective optimization problem. m e n
4.2 Cellular s structure of population
Cellular gene algorithm (CGA) is a cl etic lass of GA with a d n trial solutions dedecentralized population in which the t rlapping neig ghborhoods. C CGAs change the velop in over structure of the populatio to a set of adjacent c on cells dimensional s space, and obv viously affect the t (nodes) in n-d selection oper ration. The st tructure sharp pens the exploration/exploitat tion to find be etter solutions rapidly [24]. In s . Fig. 6, a 2-dim mensional cellu ular structure with three no odes (cells) and the neighbors a shown. Th neighborho eir are he oods are shown w with different radii. For exa ample, has 24 s neighbors bec cause of its r radius (=2), w whereas and d have only eigh neighbors ( ht (radius=1). The regene eration proces can be cyclic ss cally executed ind side the cells individually without any effect on t s y y their neighbors. Fir in the selection operatio from inside the rst, on e cells, the algo orithm tries to find two suita able parents fr rom the cells neig ghbors and de eliver them to the next op o peration, recombin nation (or cro ossover in GAs After recom s). mbination, the re esult moves to the mutatio operation, and o on then finally th result (offsp he pring) will rep place the previ ious individual in the cell if the fitness value of the new re esult shows that th new individ he dual is better t than the previ ious one. of blem using GA or CGAs that As The part o every prob varies the mo is the fitness function. In general, no b ost n best solution exist that maxim ts mizes all the ob bjectives simu ultaneously. Seve eral methods, such as utility functions [ [29], can reduce th multi-object he tive problem t a scalar opti to imization proble as follows The fitness function is c em s. constructed acco ording to the objectives co onsidered in this
JOURNA OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-96 AL 6 617 HTTPS://SITES.GOOGLE.CO OM/SITE/JOURNALOF FCOMPUTING/ WWW.J JOURNALOFCOMPUT TING.ORG
73
TABLE 3 MAGN NITUDES OF THE DISSIMILARITIE BETWEEN TH SIX JOBS E ES HE (TASKS) IN ELEV VATION LEVEL OF RIGHT UPPER ARM O R
TABLE 4 ES MAGNITUDES OF THE DISSIMILARITIE BETWEEN THE SIX JOBS (TASKS) IN FREQUENC (CHANGE RA ) OF RIGHT UPPER ARM S CY ATE U
study as combined in (20). y, d
4.3 S Synchronous and Asynch s hronous CGA A
Gene erally, two pol licies exist in the cycles of th regenerat he tion p process in CG GAs [24]. The policies show how the rep gener ration cycle is applied to th cells as ind s he dividuals. If the c cycle is applie to all the cells simultan ed neously, the CGA is called to be synchronous, Syn-CGA, otherwise, is A o said t be asynchronous, Asyn-C to CGA. . Althou ugh, in SynCGA all individu As, uals in the cells for next generation are forma ally created at the same time, the indi a t ividuals are upda ated in a seque entially way in Asyn-CGAs [30]. There i s are f four main up pdate policies of individua in Asynals CGA as follows: line sweep (L A l LS), fixed ran ndom sweep (FRS) new rando sweep (N ), om NRS) and unif form choice (UC) [24]. LS policy sequentially updates the cells, row by y y c row, while others update them with uniform probability. w LS po olicy is less st tochastic than other asynch n hronous update policies. For this research, Syn-CGA and Asyn-CGA t S d olicy are empl loyed and in the next sect with LS update po tion, the results attained from both and GA are coma A, d. pared
entirely diss similar in elev vation level, a is shown in the as n table. riteria are give the same importance, so that en o All the cr all the corre esponding weights set to th value of 1s The he s. size of the p populations, t the crossover and the mut tation probabilities for three al s lgorithms, GA Asyn-CGA and A, A Syn-CGA, ar fixed at 100 0.9 and 0.1, r re 0, respectively. C Clearly, the pop ulations in b both CGAs ha ave 2-dimens sional The ion ed structures. T regenerati is permitte to proceed up to a generation number of 1 n 100. Each of th algorithms evalhe uated job rotation schedules, without imposing n ons. any limitatio Some of the results o obtained by th generation are he ns able 5, which consists of th hree sub-tables cors shown in Ta responding to GA, Asyn n-CGA and Sy yn-CGA. The best e btained from e each algorithm by 100 rege m enerasolutions ob tions are sho own in the re espective sub-tables. The as ssignments of wo orkers to jobs (tasks) mostly satisfy the o y objectives impose on the prob ed blem and increase the maximum dissimilarity between tw consecutiv shifts for each y wo ve worker. The workers do not perform the same job (in e bs elevation lev or frequen magnitude in two adjacent vel ncy es) shifts, as lon as the max ng ximum dissim milarities amon all ng jobs assigne to each wo ed orker are avail lable in the sc chedules. The lar rgest value of MLObjective (eq. 39.4353) and f e ) MVObjectiv e (eq. 103.27 714) appeared in the schedules d y A. suggested by the Syn-CGA To evalua the algorit ate thms further, all algorithm are ms executed up to 100 individ p dual execution and each execuns, tion consiste of 100 gene ed erations. Then the best solu n, utions (based on th fitness value of the popu he e) ulations were s saved during the a executions. The average a standard deviall and ation (SD) v values of the a fitness valu were calcu all ues ulated generation b generation, and they are presented in Fig. by , e n 7. nd utions quickly for a SynCGA is better to fin better solu given set of objectives. A f Although the improvemen at e nts finding bet tter solutions in the nex generation in s xt ns SynCGA an AsynCGA are the nearly the same (F nd y Fig. 7, above), the S value of Sy SD ynCGA (Fig. 7 bottom) sup 7, pports this observat tion.
6 CONCLUS SIONS AND FU URTHER RES SEARCH
As the impl lementation, p policies of job rotation hav not b ve been explici itly addressed in the literature; special care d l should be t taken in inter rpreting these results. In m e many repetitive jo obs (e.g., ass sembly-line jo obs), the assi igned workers mu usually ma ust aintain or chan their body arenge y as (e.g., upp arms, nec trunk, etc.) and related posper ck, d tures (e.g. ra aised, bended, etc.) in the sa , ame positions with s the same fr requencies. Ba ased on the h human ergono omics ody frequency), po osture literature, bo postures, change rate (f variety and diversity dur ring a job can influence th den he velopment o risks and w of work-related m musculoskeleta disal orders (espe ecially for few heavy jobs Therefore, body wer s). posture and its diversity are effective in the job rot d tation policy along with other v g variables such as force, dura ation, environmen ntal and ment factors. In this research we tal n h,
5 RE ESULTS
In this section, the problem intr e roduced in Se ection 2 was studi ied. Six worke with six sh ers hifts in one workday, and only one body area, the right up pper arm, are considered. evaluation of the dissimilar rity magnitud in elevades The e tion l level and freq quency produ uced the results shown in Table 3 and 4. For simplicity, al values were rounded to es r ll e short decimal num t mbers. It is in nteresting to remark that only Jobs 1 and 3 have similar frequencies, but they are b
JOURNAL OF COMPUTING, VO L OLUME 3, ISSUE 6, 2011, ISSN 2151-9617 2 7 HTTPS://S SITES.GOOGLE.COM M/SITE/JOURNALOFC COMPUTING/ WWW.JOU URNALOFCOMPUTIN NG.ORG
74
TAB 5 BLE THREE BEST JOB ROTATION SCHEDULES OB BTAINED BY 100 0
GENE ERATION
Fig.7. A Average and SD of best solution by 100 executio shown D ons in each iteration h
added 5-scale linguistic variable sets into a co onventional postur assessment and defined based on th posture re d, he variety and diversi y ity, the dissim milarity magn nitudes between jobs in their demands on the body are consideas ered. T Through the magnitudes and the general implemenm tation strategy of th job rotation we specified two main he n, d ives, the ML and MV objecti ives, in conjun nction with objecti the int teger program mming approa ach. These obj jectives reflect a policy that generates schedules with th maximal g he dissim milarity magni itudes betwe een jobs in continuous c shifts f workers and also the maximal total of the disfor a m similar rities among th jobs assigned to each wo he orker. The new model was presented and tested through an e w d t examp involving six assembly jo with diffe ple s obs erent elevations a and frequencie in the right upper arm. Although it es A was a simple test case, the prob c blem had a la arge search space; hence, genet algorithms were emplo tic s oyed. This initial test and its re esults demonstrated the nee of better ed solutio resulting from converge ons f ence to global optimum solutio ons. New fam milies of gene etic algorithm cellular ms, genetic algorithms, were used. The results sh c T howed that one ce ellular genetic algorithm, Syn-CGA, had the best c S perform mance in term of the mo appropriate average ms ost and sta andard deviat tion, in finding solutions. g As a first approa to this new aspect of jo rotation ach w ob proble ems, our work will continu with three interesting k ue ch xtending the model for man m nual assemresearc lines. (i) Ex bly lin balancing; (i the applicat ne ii) tion of some other physo ical ex xposures (e.g., force/load) to the propose job rotaed model; and (iii improving some experim i) s mental heution m
ristic rules to adapt the rege eneration cycl in CGAs. le
REFERENCE ES
[1] E.J. Lodree, et al., Taxonom for integratin scheduling th my ng heory human factors: R Review and rese earch opportunit ties, and h Intern ational Journal o Industrial Ergo of onomics, vol. 39 no. 9, 09, 1, 200 pp. 39-51. [2] D. Rodrick, e al., Job rota et ation, The occu upational ergono omics handb book, Second ed ., Taylor&Francis Groups, 2006. s [3] D.D. Triggs and P.M. King Job rotation an administr g, n: rative gy ontrol, Professi ional Safety, vol. 45, strateg for hazard co 2000, pp. 32-34. ffects of job rot tation on the ris of sk [4] M.B. Frazer, et al., The ef ting low back paiin, Ergonomics, vol. 46, no. 9, 2 2003, report pp. 90 04-919; DOI Doi 10.1080/001401303000090161. [5] W. Tharmm maphornphilas, occup pational noise et al., ying Apply mathemat thical Industrial modelling to create jo rotation schedules for minimizing ob exposure., A American Hygie ne Association J Journal, vol. 64, 2 2003, pp. 401-40 05. Mas, et al., A m multi-criteria gene algorithm for the etic [6] J.A. Diego-M genera ration of job rotat tion schedules, International Jou urnal of Indu ustrial Ergonomiics, vol. 39, no. 1 2009, pp. 23-3 1, 33. [7] M.K. Chung, et al., Physiolo ogical workload evaluation of screw g mobile assembly jobs, Internat y tional driving tasks in autom Journa of Industrial E al Ergonomics, vol 28, no. 3-4, 2 l. 2001, pp. 18 81-188.
JOURNA OF COMPUTING, VOLUME 3, ISSUE 6, 2011, ISSN 2151-96 AL 6 617 HTTPS://SITES.GOOGLE.CO OM/SITE/JOURNALOF FCOMPUTING/ WWW.J JOURNALOFCOMPUT TING.ORG
75
[8] L. S Straker and S.E. Mathiassen, Increased physica work loads in al ork - a neces ssity for better health and r modern wo performance e?, Ergonomics vol. 52, no. 10, 2009, pp. s, 1215-1225; DOI Doi 10.1080 0/001401309030 039101 Pii 915 5278894. [9] I. B Balogh, et al., Increasing the degree of aut e tomation in a production vol. [10] 36, system: no. 4, Consequences 2006, pp. for the physical DOI I urnal of Industria Ergonomics, al workload, International Jou 353-365 5; DOI
[23]
C.H. .
Papadimitriou u
and
K.
Ste eiglitz,
Combina ational Dover
Optiimization: [24] [25]
Algo orithms
and
Complexity,
Publlications Inc., 19 82. E. A Alba and B. Dor rronsoro, Cellula Genetic Algor ar rithms, Sprin nger Science+Bu usiness Media, L LLC, 2008. N.J. Delleman, et all., Working Post tures and Movem ments, n ing, CRC Press LLC, s Toolls for Evaluation and Engineeri 2004 4. [26] H.S. Jung and H Jung, Estab . H. blishment od o overall kload assessme ent technique fo various tasks and or work work kplaces, [27] [28] [29] [30] Inte ernational Jou urnal of Ind dustrial Ergo onomics, vol. 28, 2001, pp. 341-3 , 353. C.J. Henderson, E Ergonomics job rotation in p b poultry proc cessing, Taylor & Francis, 1992. J.H. Holland, Adapta ation in Natural and Artificial Sys stems, versity of Michiga Press, 1975. an Univ S.S. Rao, Engineeriing Optimization, Theory and Pra , ractice, n John Wiley & Sons, Inc., 2009. E. A Alba, et al., tionary Decentralized Cellular Evolut Algo orithms, Handb book of Bioinsp pired Algorithms and s Appllication, S. Olavi u and A. Y. Zomaya, eds., Chapm & man Hall/ /CRC, 2006, pp. 103-120. Cheshmehgaz has B.Sc. Hossein Rajabalipour C in Math hematics & Com mpueter Applic cations from the Uiniversity of K Kerman, Iran, and then d has gra aduated with M M.Sc. in Com mputersoftware engineering fro Amirkabir U om University of T Technology (Tehr Polytechnic) Iran, ran ), in 2003. His interests are multi-objective optie e mization problems wit industrial ap n th pplications. Th herefore, he has joined the soft co ompulligent business groups as a sen nior researcher in the ting and intel faculty of com mputer science a and information systems of Uni iversiti Teknologi Mal laysia since Jun 2008. Meanwh ne hile, he has pub blished some related p papers in evolut tionary computi ing methods and their d new applicatio in assembly line balancing, logistic network supons k, ply chain and h human factors in nvolved in manu ufacturing proble ems. Hbibollah Ha aron is currently the head of the department of i industrial computin and modeling in the faculty of computer scienc and ng f ce information sy ystems, Univers siti Teknologi M Malaysia (UTM His M). interest is soft computing appl lications in robot and manufact tic turing, and also CAD/ /CAM.
9. 10.1016/j.ergon.2004.09.009 I. Arvidsson et al., Chang n, ges in physical workload with implementat tion of mouse-ba ased information technology in n air traffic control, Interna ational Journal of Industrial -622; DOI DOI Ergonomics, vol. 36, no. 7, 2006, pp. 6132. 10.1016/j.ergon.2006.03.002 [11] B.J. Carnahan, et al., Designing safe job rotation ation and heur ristic search, schedules using optimiza 2 60. Ergonomics, vol. 43, no. 4, 2000, pp. 543-56 [12] aphornphilas and B.A. Norman, A quantitative d W. Tharmma method for determining proper job rotat tion intervals, Annals of Operations Research, vol. 128, no. 1-4, 2004, O n pp. 251-266. [13] G.C. David, Ergonomic me ethods for asses ssing exposure ed etal to risk factors for work-relate musculoskele disorders, al ord, vol. 55, no. 3, 2005, pp. Occupationa Medicine-Oxfo 190-199; DO DOI 10.1093/o OI occmed/kqi082. [14] W. Tharm mmaphornphilas and B.A. Norman, A methodology to create rob y bust job rotatio schedules, on Annals of Operations Resea O arch, vol. 155, no 1, 2007, pp. o. 339-360. [15] e rverity index for the evaluation D.H. Liles, et al., A job ser and control of lifting injury, Human Factor, vol. 26, 1984, pp. 683-693. [16] D. Desai, et al., Using RU ULA to Generate Job Rotation e Schedules: Perspective of Assembly Line Supervisors, E D onference and Proc. ASSE Professional Development Co Exposition, American Society of Safety Engin A y neers, 2006. [17] L. Mcatamney and E.N. Corlett, Rula - a Survey Method S for the nvestigation In of Work-Related Upper Limb Disorders, Applied Ergonom A mics, vol. 24, no 2, 1993, pp. o. 91-99. [18] [19] Swelling of the lower leg in sed dentary work-a J. Winkel, S pilot study, Human Ergology vol. 10, 1981, pp. 139-149. y, aard, Mwasurem ment and evalua ation of load in R.H. Westga occupationa work situation, European Jour al rnal of Applied Physiology, vol. 52, 1988, pp 291-304. p. [20] assen and J. Winkel, Quantifyin Variation in ng S.E. Mathia Physical [21] Load Using Exposure-Vs-T Time Data, -1468. Ergonomics, vol. 34, no. 12, 1991, pp. 1455ssen, et al., Variability in mechanical exposure S.E. Mathias within and between indiv viduals perform ming a highly t cs, constrained industrial work task, Ergonomic vol. 46, no. 8, [22] 2003, pp. 800-824; DOI Doi 14013031000090 0125. 10.1080/001 S.E. Mathias ssen, Diversity and variation in biomechanical exposure: What is it, and why would we li W w ike to know?, Applied Erg gonomics, vol. 37, no. 4, 2006, pp. 419-427; 3 DOI DOI 10.1016/j.apergo.2006.04.006.
You might also like
- Practical Guide To Work Study [Revised Edition]From EverandPractical Guide To Work Study [Revised Edition]Rating: 4 out of 5 stars4/5 (1)
- Ocra 1Document24 pagesOcra 1Maryko Awang HerdianNo ratings yet
- Metal Fatigue Analysis Handbook: Practical Problem-solving Techniques for Computer-aided EngineeringFrom EverandMetal Fatigue Analysis Handbook: Practical Problem-solving Techniques for Computer-aided EngineeringRating: 3.5 out of 5 stars3.5/5 (5)
- Ijaiem 2014 12 07 16Document6 pagesIjaiem 2014 12 07 16International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Jurnal ErgonomicDocument6 pagesJurnal ErgonomicDallan AizenNo ratings yet
- Muhammad Ramadhani, Rukman, Darul Prayogo, Diajeng Ayu D. PDocument11 pagesMuhammad Ramadhani, Rukman, Darul Prayogo, Diajeng Ayu D. PCLASES ITS BAÑOSNo ratings yet
- The Incorporation of Virtual Ergonomics To ImproveDocument9 pagesThe Incorporation of Virtual Ergonomics To ImproveMuthu BaskaranNo ratings yet
- Applications of Ergonomics and Work Study in An Organization (A Case Study)Document9 pagesApplications of Ergonomics and Work Study in An Organization (A Case Study)International Journal of Innovative Science and Research Technology100% (3)
- An Integrated Staff-Sizing AppDocument31 pagesAn Integrated Staff-Sizing AppRamiro Herrera JaraNo ratings yet
- Technical Report FKMDocument15 pagesTechnical Report FKM000No ratings yet
- Biomechanical Modelling of Manual Material Handling Tasks: A Comprehensive ReviewDocument8 pagesBiomechanical Modelling of Manual Material Handling Tasks: A Comprehensive ReviewTirta AjiNo ratings yet
- Research Article: Modelling A Nurse Shift Schedule With Multiple Preference Ranks For Shifts and Days-OffDocument11 pagesResearch Article: Modelling A Nurse Shift Schedule With Multiple Preference Ranks For Shifts and Days-OffMuhammad Baba GoniNo ratings yet
- Job Design For Crane Operators Based On Fatigue AsDocument12 pagesJob Design For Crane Operators Based On Fatigue As20-156 Rifka Aloyina Br TariganNo ratings yet
- A2310030111Document12 pagesA2310030111Lynne Ivy IllagaNo ratings yet
- Aplicação de Algoritmo Genético Ao Escalonamento de Tarefas Sob Restrições Ergonômicas Na Indústria de Manufatura.Document28 pagesAplicação de Algoritmo Genético Ao Escalonamento de Tarefas Sob Restrições Ergonômicas Na Indústria de Manufatura.AdrianeNo ratings yet
- Gangopadhyay-Dev2014 Article DesignAndEvaluationOfErgonomyDocument6 pagesGangopadhyay-Dev2014 Article DesignAndEvaluationOfErgonomyabhimanyu adhikaryNo ratings yet
- Ergonomics Study For Injection Moulding Section Using RULA and REBA TechniquesDocument9 pagesErgonomics Study For Injection Moulding Section Using RULA and REBA TechniquesJorge Luis Raygada AzpilcuetaNo ratings yet
- Physiological and Psychophysical Comparison Between A One and Two-Handed Identical Lifting TaskDocument4 pagesPhysiological and Psychophysical Comparison Between A One and Two-Handed Identical Lifting TaskInternational Journal of Science and Engineering InvestigationsNo ratings yet
- Work StudyDocument26 pagesWork StudyAMIYA KUMAR SAMALNo ratings yet
- Local Search Strategies For Rotating Workforce Scheduling: Nysret MusliuDocument6 pagesLocal Search Strategies For Rotating Workforce Scheduling: Nysret MusliuajaymechengineerNo ratings yet
- Health Risk Analysis 2023 1-63-74Document13 pagesHealth Risk Analysis 2023 1-63-74Djilani Hassan GadittoNo ratings yet
- Applying LIFTING Methods to Manual WorkDocument8 pagesApplying LIFTING Methods to Manual WorkCHOIRNo ratings yet
- CH 14 Work StudyDocument65 pagesCH 14 Work StudySurogste MibusontadNo ratings yet
- 185 1011 7 PBDocument9 pages185 1011 7 PBFairuzNo ratings yet
- Ba 506 Operations Management Narrative Report Job Design and Work Measurement (Part 2)Document4 pagesBa 506 Operations Management Narrative Report Job Design and Work Measurement (Part 2)Ruth Ann DimalaluanNo ratings yet
- Main 1Document8 pagesMain 1munera4350No ratings yet
- Postural Analysis of Building Construction Workers Using ErgonomicsDocument9 pagesPostural Analysis of Building Construction Workers Using Ergonomicsgowri ajithNo ratings yet
- Correcting Working Postures in Industry: A Practical Method For AnalysisDocument3 pagesCorrecting Working Postures in Industry: A Practical Method For AnalysissubirNo ratings yet
- Ergonomics Article Review by REBADocument11 pagesErgonomics Article Review by REBAtom agazhieNo ratings yet
- Current Techniques For Assessing Physical Exposure To Work Related Musculoskeletal Risks With Emphasis On Posture Based MethodsDocument23 pagesCurrent Techniques For Assessing Physical Exposure To Work Related Musculoskeletal Risks With Emphasis On Posture Based MethodsashokdinoNo ratings yet
- The NIOSH Lifting Equation For Manual LiDocument10 pagesThe NIOSH Lifting Equation For Manual LiJoana AraújoNo ratings yet
- Quality Work Life DesignDocument5 pagesQuality Work Life DesignNabeel AhmadNo ratings yet
- Journal of Occupational Safety and Health: Dec 2004 Vol. 1 No. 2Document51 pagesJournal of Occupational Safety and Health: Dec 2004 Vol. 1 No. 2Mohdali MursidanNo ratings yet
- Correa, Walter, Torriani-Pasin, Barros, & Tani (2014) PDFDocument13 pagesCorrea, Walter, Torriani-Pasin, Barros, & Tani (2014) PDFAmry HartantoNo ratings yet
- Simulation of Manual Materials Handling: Biomechanial Assessment Under Different Lifting ConditionsDocument10 pagesSimulation of Manual Materials Handling: Biomechanial Assessment Under Different Lifting ConditionsAditya Pujasakti YuswiNo ratings yet
- Lifting Equation For Manual LiftingDocument10 pagesLifting Equation For Manual LiftingShafiqul IslamNo ratings yet
- Dynamic Rescheduling That Simultaneously Considers Efficiency and StabilityDocument15 pagesDynamic Rescheduling That Simultaneously Considers Efficiency and StabilityKaouther BenaliNo ratings yet
- Heuristic Algorithm For Workforce Scheduling Problems: Carlos MontoyaDocument14 pagesHeuristic Algorithm For Workforce Scheduling Problems: Carlos MontoyaajaymechengineerNo ratings yet
- Rescheduling Manufacturing Systems: A Framework of Strategies, Policies, and MethodsDocument24 pagesRescheduling Manufacturing Systems: A Framework of Strategies, Policies, and MethodsRani DandiwalNo ratings yet
- Workplace Design - Supriya ShubhamDocument28 pagesWorkplace Design - Supriya Shubhamsarprajkatre143No ratings yet
- Ergonomic Risk Factors For Workers in Garments Manufacturing - A Case Study From PakistanDocument5 pagesErgonomic Risk Factors For Workers in Garments Manufacturing - A Case Study From PakistanLâm Ngọc HùngNo ratings yet
- synopsis kwdsboqDocument9 pagessynopsis kwdsboqdivya.bishnoi8No ratings yet
- Intro Grey Sys TheoryDocument12 pagesIntro Grey Sys TheoryShofa Aulia AldhamaNo ratings yet
- Running Head: Workplace ErgonomicsDocument5 pagesRunning Head: Workplace ErgonomicsOchweda JnrNo ratings yet
- Musculoskeletal Disorder Risk Assessment in Small Scale Forging Industry by Using RULA MethodDocument6 pagesMusculoskeletal Disorder Risk Assessment in Small Scale Forging Industry by Using RULA Methodmohitnet1327No ratings yet
- ErgonomicsDocument18 pagesErgonomicsbalakaleesNo ratings yet
- An Owner-Centric Metric For The Evaluation of Online Job SchedulesDocument13 pagesAn Owner-Centric Metric For The Evaluation of Online Job SchedulesssfofoNo ratings yet
- Work Allowance in Garment Industry: Reasearch Methodology End Term JuryDocument8 pagesWork Allowance in Garment Industry: Reasearch Methodology End Term JurySANJANA SINGHNo ratings yet
- Ergonomics: Body Posture: Summary On Research PapersDocument11 pagesErgonomics: Body Posture: Summary On Research PapersPreksha PandeyNo ratings yet
- Labor Utilization and Man to Machine Ratio StudyDocument10 pagesLabor Utilization and Man to Machine Ratio StudyRowell Tayag DizonNo ratings yet
- Efficient Global Optimization of Expensive Black-Box FunctionsDocument38 pagesEfficient Global Optimization of Expensive Black-Box FunctionsBengt HörbergNo ratings yet
- Work StudyDocument5 pagesWork StudyLovepreet SinghNo ratings yet
- Proposal of Parameters To Implement A Workstation Rotation System To Protect Against MsdsDocument10 pagesProposal of Parameters To Implement A Workstation Rotation System To Protect Against MsdsEnriqueNo ratings yet
- 01 Robert Conti Lean Production Job Stress 0240260904Document26 pages01 Robert Conti Lean Production Job Stress 0240260904Lisa Anggun SaraswatiNo ratings yet
- Workforce Scheduling and Routing Problems LiteratuDocument32 pagesWorkforce Scheduling and Routing Problems LiteratujeisonNo ratings yet
- Quick Exposure Check (QEC) Reference GuideDocument22 pagesQuick Exposure Check (QEC) Reference GuideVitaPangestikaNo ratings yet
- Risk Analysis of Gari FryingDocument13 pagesRisk Analysis of Gari FryingSamuelShinaAyodeleNo ratings yet
- Heuristic Algorithm For Workforce Scheduling Problems PDFDocument14 pagesHeuristic Algorithm For Workforce Scheduling Problems PDFBiantoroKunartoNo ratings yet
- Applying A Natural Intelligence Pattern in Cognitive RobotsDocument6 pagesApplying A Natural Intelligence Pattern in Cognitive RobotsJournal of Computing100% (1)
- Detection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksDocument8 pagesDetection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksJournal of ComputingNo ratings yet
- Mobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesDocument5 pagesMobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesJournal of ComputingNo ratings yet
- Hybrid Network Coding Peer-to-Peer Content DistributionDocument10 pagesHybrid Network Coding Peer-to-Peer Content DistributionJournal of ComputingNo ratings yet
- Energy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsDocument6 pagesEnergy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsJournal of ComputingNo ratings yet
- Divide and Conquer For Convex HullDocument8 pagesDivide and Conquer For Convex HullJournal of Computing100% (1)
- Complex Event Processing - A SurveyDocument7 pagesComplex Event Processing - A SurveyJournal of ComputingNo ratings yet
- Business Process: The Model and The RealityDocument4 pagesBusiness Process: The Model and The RealityJournal of ComputingNo ratings yet
- A Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingDocument4 pagesA Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingJournal of ComputingNo ratings yet
- Image Retrival of Domain Name System Space Adjustment TechniqueDocument5 pagesImage Retrival of Domain Name System Space Adjustment TechniqueJournal of ComputingNo ratings yet
- Using Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationDocument8 pagesUsing Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationJournal of ComputingNo ratings yet
- Real-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationDocument6 pagesReal-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationJournal of ComputingNo ratings yet
- Analytical Study of AHP and Fuzzy AHP TechniquesDocument4 pagesAnalytical Study of AHP and Fuzzy AHP TechniquesJournal of ComputingNo ratings yet
- Product Lifecycle Management Advantages and ApproachDocument4 pagesProduct Lifecycle Management Advantages and ApproachJournal of ComputingNo ratings yet
- Decision Support Model For Selection of Location Urban Green Public Open SpaceDocument6 pagesDecision Support Model For Selection of Location Urban Green Public Open SpaceJournal of Computing100% (1)
- Exploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyDocument7 pagesExploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyJournal of ComputingNo ratings yet
- Combining Shape Moments Features For Improving The Retrieval PerformanceDocument8 pagesCombining Shape Moments Features For Improving The Retrieval PerformanceJournal of ComputingNo ratings yet
- QoS Aware Web Services Recommendations FrameworkDocument7 pagesQoS Aware Web Services Recommendations FrameworkJournal of ComputingNo ratings yet
- K-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningDocument7 pagesK-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningJournal of ComputingNo ratings yet
- Application of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingDocument11 pagesApplication of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingJournal of ComputingNo ratings yet
- Predicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextDocument10 pagesPredicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextJournal of ComputingNo ratings yet
- Hiding Image in Image by Five Modulus Method For Image SteganographyDocument5 pagesHiding Image in Image by Five Modulus Method For Image SteganographyJournal of Computing100% (1)
- Secure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageDocument6 pagesSecure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageJournal of ComputingNo ratings yet
- Impact of Facebook Usage On The Academic Grades: A Case StudyDocument5 pagesImpact of Facebook Usage On The Academic Grades: A Case StudyJournal of Computing100% (1)
- Impact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelDocument6 pagesImpact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelJournal of ComputingNo ratings yet
- Towards A Well-Secured Electronic Health Record in The Health CloudDocument5 pagesTowards A Well-Secured Electronic Health Record in The Health CloudJournal of Computing0% (1)
- Detection of Retinal Blood Vessel Using Kirsch AlgorithmDocument4 pagesDetection of Retinal Blood Vessel Using Kirsch AlgorithmJournal of ComputingNo ratings yet
- Prioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachDocument9 pagesPrioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachJournal of ComputingNo ratings yet
- Arabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowDocument5 pagesArabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowJournal of ComputingNo ratings yet
- When Do Refactoring Tools Fall ShortDocument8 pagesWhen Do Refactoring Tools Fall ShortJournal of ComputingNo ratings yet
- The Causes and Prevention of Crowd DisastersDocument10 pagesThe Causes and Prevention of Crowd DisastersVarun SwaminathanNo ratings yet
- SW-TS40T Sub-Miniature Toggle SwitchesDocument4 pagesSW-TS40T Sub-Miniature Toggle SwitchesVALTERNo ratings yet
- Module 1: Introduction Introduction To Tribology: Fig. 1.1: Carbon Graphite SealDocument18 pagesModule 1: Introduction Introduction To Tribology: Fig. 1.1: Carbon Graphite Sealbansalmohit01No ratings yet
- Flash ADCDocument3 pagesFlash ADCKiran SomayajiNo ratings yet
- MIMO Channel CapacityDocument9 pagesMIMO Channel CapacityGendyNo ratings yet
- Lesson 7: Cylinders: Basic Hydraulic SystemsDocument12 pagesLesson 7: Cylinders: Basic Hydraulic Systemsoscar el carevergaNo ratings yet
- Wire Rope Maintenance enDocument12 pagesWire Rope Maintenance ensriabolfazlNo ratings yet
- Townsend DischargeDocument6 pagesTownsend DischargeGordon DuffNo ratings yet
- DR System ConciseDocument37 pagesDR System ConciseJiten KarmakarNo ratings yet
- Usn LM2500 Asme Paper GT2010-22811 61410 JalDocument7 pagesUsn LM2500 Asme Paper GT2010-22811 61410 Jalferrerick0% (1)
- Pipeline Tow MethodDocument25 pagesPipeline Tow MethodctrlaltdestroyNo ratings yet
- Cassette toilet spare parts guide for models C2, C3 and C4Document21 pagesCassette toilet spare parts guide for models C2, C3 and C4georgedragosNo ratings yet
- Bilge Alarm Monitor OMD 11Document22 pagesBilge Alarm Monitor OMD 11Lucian Iftemie100% (3)
- Cyber Security Research Proposal - SandboxingDocument23 pagesCyber Security Research Proposal - SandboxingAnonymous Sa6jc83D100% (4)
- LDX2101 Spec SheetDocument2 pagesLDX2101 Spec SheetGaurav NarulaNo ratings yet
- 2014-6-2 PCED South Hill Coalition Proposed Elements MatrixDocument2 pages2014-6-2 PCED South Hill Coalition Proposed Elements MatrixSpokane City CouncilNo ratings yet
- 95 - 737-General-InformationDocument3 pages95 - 737-General-InformationffontanaNo ratings yet
- AASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageDocument11 pagesAASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageErnesto Oscar VidelaNo ratings yet
- Devoir 2 Arsalan 2SM BIOFDocument3 pagesDevoir 2 Arsalan 2SM BIOFphytanjaNo ratings yet
- Niveau S Longrine Type Pou05-S Section 20x25: A-A B-B C-C D-DDocument1 pageNiveau S Longrine Type Pou05-S Section 20x25: A-A B-B C-C D-DAWOUNANGNo ratings yet
- Sap MM LSMWDocument18 pagesSap MM LSMWMani balan100% (1)
- 06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceDocument3 pages06-Fc428mar Water-in-Fuel Indicator Sensor Circuit - Voltage Above Normal or Shorted To High SourceSuryadiNo ratings yet
- Pen Holder SHSDocument16 pagesPen Holder SHSabhijeetbose1No ratings yet
- Essential safety tips for using a pressure cookerDocument18 pagesEssential safety tips for using a pressure cookerCarlotaNo ratings yet
- Odv-065r18ejj-G DS 2-0-3Document1 pageOdv-065r18ejj-G DS 2-0-3Евгений Переверзев0% (1)
- Government Engineering College Surveying Lab ManualDocument26 pagesGovernment Engineering College Surveying Lab ManualNittin BhagatNo ratings yet
- Saint Gobain - CertainTeed Roofing ShinglesDocument14 pagesSaint Gobain - CertainTeed Roofing ShinglesJagriti KashyapNo ratings yet
- Sallyport MBI Bifold BrochureDocument6 pagesSallyport MBI Bifold BrochureameraldaherNo ratings yet
- Roebuck 1942Document12 pagesRoebuck 1942Imam Saja DechNo ratings yet
- Analysis, Specification and Estimate On Road WorksDocument71 pagesAnalysis, Specification and Estimate On Road WorksAnonymous BACdUNvPZ280% (5)
- How to Do Nothing: Resisting the Attention EconomyFrom EverandHow to Do Nothing: Resisting the Attention EconomyRating: 4 out of 5 stars4/5 (421)
- Content Rules: How to Create Killer Blogs, Podcasts, Videos, Ebooks, Webinars (and More) That Engage Customers and Ignite Your BusinessFrom EverandContent Rules: How to Create Killer Blogs, Podcasts, Videos, Ebooks, Webinars (and More) That Engage Customers and Ignite Your BusinessRating: 4.5 out of 5 stars4.5/5 (42)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- More Porn - Faster!: 50 Tips & Tools for Faster and More Efficient Porn BrowsingFrom EverandMore Porn - Faster!: 50 Tips & Tools for Faster and More Efficient Porn BrowsingRating: 3.5 out of 5 stars3.5/5 (23)
- SEO 2021: Learn search engine optimization with smart internet marketing strategiesFrom EverandSEO 2021: Learn search engine optimization with smart internet marketing strategiesRating: 5 out of 5 stars5/5 (6)
- So You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenFrom EverandSo You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenRating: 4.5 out of 5 stars4.5/5 (35)
- SEO: The Ultimate Guide to Optimize Your Website. Learn Effective Techniques to Reach the First Page and Finally Improve Your Organic Traffic.From EverandSEO: The Ultimate Guide to Optimize Your Website. Learn Effective Techniques to Reach the First Page and Finally Improve Your Organic Traffic.Rating: 5 out of 5 stars5/5 (5)
- How to Be Fine: What We Learned by Living by the Rules of 50 Self-Help BooksFrom EverandHow to Be Fine: What We Learned by Living by the Rules of 50 Self-Help BooksRating: 4.5 out of 5 stars4.5/5 (48)
- Python for Beginners: The 1 Day Crash Course For Python Programming In The Real WorldFrom EverandPython for Beginners: The 1 Day Crash Course For Python Programming In The Real WorldNo ratings yet
- Web Copy That Sells: The Revolutionary Formula for Creating Killer Copy That Grabs Their Attention and Compels Them to BuyFrom EverandWeb Copy That Sells: The Revolutionary Formula for Creating Killer Copy That Grabs Their Attention and Compels Them to BuyRating: 4 out of 5 stars4/5 (13)
- Ultimate Guide to LinkedIn for Business: Access more than 500 million people in 10 minutesFrom EverandUltimate Guide to LinkedIn for Business: Access more than 500 million people in 10 minutesRating: 5 out of 5 stars5/5 (5)
- The Digital Marketing Handbook: A Step-By-Step Guide to Creating Websites That SellFrom EverandThe Digital Marketing Handbook: A Step-By-Step Guide to Creating Websites That SellRating: 5 out of 5 stars5/5 (6)
- The $1,000,000 Web Designer Guide: A Practical Guide for Wealth and Freedom as an Online FreelancerFrom EverandThe $1,000,000 Web Designer Guide: A Practical Guide for Wealth and Freedom as an Online FreelancerRating: 4.5 out of 5 stars4.5/5 (22)
- The Wires of War: Technology and the Global Struggle for PowerFrom EverandThe Wires of War: Technology and the Global Struggle for PowerRating: 4 out of 5 stars4/5 (34)
- Facing Cyber Threats Head On: Protecting Yourself and Your BusinessFrom EverandFacing Cyber Threats Head On: Protecting Yourself and Your BusinessRating: 4.5 out of 5 stars4.5/5 (27)
- Blog, Inc.: Blogging for Passion, Profit, and to Create CommunityFrom EverandBlog, Inc.: Blogging for Passion, Profit, and to Create CommunityRating: 3.5 out of 5 stars3.5/5 (22)
- Ultimate Guide to YouTube for BusinessFrom EverandUltimate Guide to YouTube for BusinessRating: 5 out of 5 stars5/5 (1)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersFrom EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersRating: 5 out of 5 stars5/5 (7)
- A Great Online Dating Profile: 30 Tips to Get Noticed and Get More ResponsesFrom EverandA Great Online Dating Profile: 30 Tips to Get Noticed and Get More ResponsesRating: 3.5 out of 5 stars3.5/5 (2)
- Monitored: Business and Surveillance in a Time of Big DataFrom EverandMonitored: Business and Surveillance in a Time of Big DataRating: 4 out of 5 stars4/5 (1)
- The Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineFrom EverandThe Ultimate LinkedIn Sales Guide: How to Use Digital and Social Selling to Turn LinkedIn into a Lead, Sales and Revenue Generating MachineNo ratings yet
- Tiny Python Projects: Learn coding and testing with puzzles and gamesFrom EverandTiny Python Projects: Learn coding and testing with puzzles and gamesRating: 5 out of 5 stars5/5 (2)
![Practical Guide To Work Study [Revised Edition]](https://imgv2-1-f.scribdassets.com/img/word_document/245836753/149x198/e8597dfaef/1709916910?v=1)