You might also like
- PFC ConverterDocument17 pagesPFC ConverterSandeep Guha NiyogiNo ratings yet
- PFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-EnDocument31 pagesPFC Boost Converter Design Guide - Infineon - Infineon-ApplicationNote - PFCCCMBoostConverterDesignGuide-An-V02 - 00-Enkik020No ratings yet
- A Study On MOSFET Gate Driver CircuitDocument7 pagesA Study On MOSFET Gate Driver CircuitPham Viet QuanNo ratings yet
- Buck PFCDocument37 pagesBuck PFCranjitheee1292No ratings yet
- Calculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL StarterDocument5 pagesCalculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL Startererson1981No ratings yet
- A N O PV:: Pplication OTE Ptimal Cable Sizing in Systems Case StudyDocument19 pagesA N O PV:: Pplication OTE Ptimal Cable Sizing in Systems Case Studyacsbaltazar4474No ratings yet
- Transformer Turn CalculationDocument27 pagesTransformer Turn Calculationanand shekhawatNo ratings yet
- Problems in Magnetic Circuit AnalysisDocument15 pagesProblems in Magnetic Circuit AnalysiscvscsNo ratings yet
- Design 1.5kVA PWM InverterDocument13 pagesDesign 1.5kVA PWM Invertershah pallav pankaj kumarNo ratings yet
- Reactive Power CompensationDocument18 pagesReactive Power CompensationKamugasha KagonyeraNo ratings yet
- Power Electronics Project TitlesDocument4 pagesPower Electronics Project Titlesvmurali.infoNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Calculate Capacitor Size for Power Factor CorrectionDocument7 pagesCalculate Capacitor Size for Power Factor Correctionardin0506No ratings yet
- Transformer DesignDocument43 pagesTransformer DesignbobNo ratings yet
- Types of Digital Display DevicesDocument4 pagesTypes of Digital Display DeviceschouguleNo ratings yet
- SG3525 PWM Controller Circuit Diagram Explains Push-Pull ConverterDocument7 pagesSG3525 PWM Controller Circuit Diagram Explains Push-Pull ConverterjaigodaraNo ratings yet
- NRI Discovery LabDocument19 pagesNRI Discovery Labden headNo ratings yet
- Course Plan-Power ElectronicsDocument5 pagesCourse Plan-Power ElectronicsNarasimman DonNo ratings yet
- Alabama Engineering University, Invertors, Prof - Dr.eng. Jonathan Taylor - MoonDocument13 pagesAlabama Engineering University, Invertors, Prof - Dr.eng. Jonathan Taylor - MoonOvidiu StoianNo ratings yet
- CCM Boost PFC Converter ReviewDocument18 pagesCCM Boost PFC Converter ReviewМилан ЛукићNo ratings yet
- Inductor Design Methodology for Power ElectronicsDocument6 pagesInductor Design Methodology for Power ElectronicspedrovilknNo ratings yet
- Designing Planar Magnetics DixonDocument26 pagesDesigning Planar Magnetics Dixonarulsrini77No ratings yet
- BBGDocument8 pagesBBGGrandeurNo ratings yet
- MicroInverter 01444ADocument54 pagesMicroInverter 01444ArqwertyNo ratings yet
- Line Commutated Converters ExplainedDocument10 pagesLine Commutated Converters ExplainedJay Romar PabianiaNo ratings yet
- 022 - Lecture 22 360 Chapter 7 Single Phase Induction MotorDocument29 pages022 - Lecture 22 360 Chapter 7 Single Phase Induction Motorapi-369945467% (3)
- Power Factor CorrectionDocument48 pagesPower Factor Correctionskaarz86% (7)
- How To Calculate AC Choke For Mains Supply and DC Choke For DC BusDocument2 pagesHow To Calculate AC Choke For Mains Supply and DC Choke For DC BusNanda KumarNo ratings yet
- ICL8038 Linear Sweep Function Generator CCTDocument2 pagesICL8038 Linear Sweep Function Generator CCTian_new100% (1)
- Special Purpose MotorsDocument16 pagesSpecial Purpose MotorsHari ReddyNo ratings yet
- Static Var CompensatorDocument29 pagesStatic Var CompensatorCarlos Fabian GallardoNo ratings yet
- Power Supplies TutorialDocument9 pagesPower Supplies TutorialBarry Bj ShaideNo ratings yet
- Electric Piano: Adam Estes and Yukimi MorimotoDocument21 pagesElectric Piano: Adam Estes and Yukimi MorimotoBenjaminNo ratings yet
- Electromagnetic Compatibility of Industrial Networks and FieldbusesDocument38 pagesElectromagnetic Compatibility of Industrial Networks and FieldbusesCarlos ChocobarNo ratings yet
- Standard & Open Power Transformers 15VA - 1000VADocument26 pagesStandard & Open Power Transformers 15VA - 1000VAAnonymous Wyb8Y1No ratings yet
- Hearing Aid (Project Report)Document5 pagesHearing Aid (Project Report)Speech's ClubNo ratings yet
- Induction MotorsDocument81 pagesInduction MotorsIdhamtanahbaruNo ratings yet
- 11 AC Voltage ControlDocument27 pages11 AC Voltage ControlmohamedNo ratings yet
- Boost DesignDocument4 pagesBoost DesignmuthukumartharaniNo ratings yet
- Power Factor Correction Using Boost ConverterDocument7 pagesPower Factor Correction Using Boost ConverterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 100kWp Grid Connected Solar ProposalDocument16 pages100kWp Grid Connected Solar ProposalRajaNo ratings yet
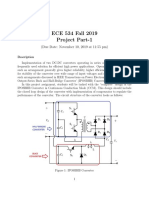
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- Build A One Transistor FM RadioDocument6 pagesBuild A One Transistor FM RadioKaran TanwarNo ratings yet
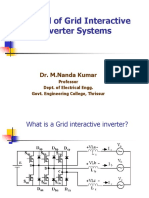
- Grid Connected Inverter Control PDFDocument133 pagesGrid Connected Inverter Control PDFAnonymous tmJSZwulNo ratings yet
- Design Concept for a Transformerless Solar InverterDocument3 pagesDesign Concept for a Transformerless Solar InverterdragonjahirshaNo ratings yet
- Product registration for Ecodial Advance Calculation 4.25 INTDocument1 pageProduct registration for Ecodial Advance Calculation 4.25 INTDery TriNo ratings yet
- Electrical WiringDocument21 pagesElectrical WiringsharathVEMNo ratings yet
- Assignment-1: Subject: Renewable Energy and Distributed Generation B.Tech - VII Sem. ElectricalDocument2 pagesAssignment-1: Subject: Renewable Energy and Distributed Generation B.Tech - VII Sem. Electricalbad is good tatyaNo ratings yet
- Solar-Powered Battery Charging With Highly Efficient Buck ConverterDocument20 pagesSolar-Powered Battery Charging With Highly Efficient Buck ConverterSusanNo ratings yet
- BASIC BLOCK DIAGRAM OF PV SYSTEM DESIGNDocument24 pagesBASIC BLOCK DIAGRAM OF PV SYSTEM DESIGNLendry NormanNo ratings yet
- Manual Axpert KING PYLONDocument59 pagesManual Axpert KING PYLONEllis BergmanNo ratings yet
- Transformer Winding Magnet Wire ChartDocument2 pagesTransformer Winding Magnet Wire ChartPlaton Apergis100% (1)
- Power Electronics Converters and their Control for Renewable Energy ApplicationsFrom EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikNo ratings yet
- Power Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesFrom EverandPower Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesNo ratings yet
- Unified Power Flow Controller Technology and ApplicationFrom EverandUnified Power Flow Controller Technology and ApplicationRating: 4 out of 5 stars4/5 (5)
- An 42047 PDFDocument13 pagesAn 42047 PDFM HasanNo ratings yet
- Powder Coating - Quote - Red FinishingDocument2 pagesPowder Coating - Quote - Red FinishingHariHaranNo ratings yet
- Jurnal AgungDocument17 pagesJurnal AgungAdrianto AdrianNo ratings yet
- Advert - Recruitment July 2023-PDF - 2Document28 pagesAdvert - Recruitment July 2023-PDF - 2charlesNo ratings yet
- Cathelco Evac ICPP ManualDocument85 pagesCathelco Evac ICPP ManualВладимир ПетрукNo ratings yet
- v42n3 4 Cyber Attacks and The Roles The Military Can PlayDocument11 pagesv42n3 4 Cyber Attacks and The Roles The Military Can PlaygreycompanionNo ratings yet
- DREWRY v. CUMBERLAND COUNTY JAIL Et Al - Document No. 5Document3 pagesDREWRY v. CUMBERLAND COUNTY JAIL Et Al - Document No. 5Justia.comNo ratings yet
- ASME Mag - 0815Document68 pagesASME Mag - 0815Rahman HakimNo ratings yet
- Para Sa Download NG FileDocument1 pagePara Sa Download NG FileJazzmin Rae BarbaNo ratings yet
- 10bioavailability AbsorptionDocument67 pages10bioavailability AbsorptionNikki ChauhanNo ratings yet
- How Cebu Pacific Lost Millions Each Year Due to a Bad Domain NameDocument9 pagesHow Cebu Pacific Lost Millions Each Year Due to a Bad Domain NamednarabNo ratings yet
- Streamlining Transfer Pricing Analysis: Welcome To The Business of CertaintyDocument8 pagesStreamlining Transfer Pricing Analysis: Welcome To The Business of Certaintyekomedan ekoNo ratings yet
- Patents: Md. Noman SiddikeeDocument27 pagesPatents: Md. Noman SiddikeezulfikarNo ratings yet
- 73127-Irelands-Stow-Park-Bungay-FINAL 2Document16 pages73127-Irelands-Stow-Park-Bungay-FINAL 2Jonathan HuntNo ratings yet
- Pre Unit7 ExtraPracticeDocument2 pagesPre Unit7 ExtraPracticeการ์ตูน พากย์ไทยNo ratings yet
- Chapter 4: Basic Probability ConceptsDocument10 pagesChapter 4: Basic Probability ConceptsB VaidehiNo ratings yet
- MS-17F2 - MS-17F21 Rev1.0Document59 pagesMS-17F2 - MS-17F21 Rev1.0Pavel RostovtsevNo ratings yet
- ASTM D7015 - 07, Obtaining Intact Block (Cubical and Cylindrical) Samples of SoilsDocument6 pagesASTM D7015 - 07, Obtaining Intact Block (Cubical and Cylindrical) Samples of SoilsBárbara RodríguezNo ratings yet
- BDWWinter 2024 Web ADocument32 pagesBDWWinter 2024 Web AAl GalassoNo ratings yet
- Antonio Angel Hernandez - WWI Guided Notes - Freedom of Speech PDFDocument16 pagesAntonio Angel Hernandez - WWI Guided Notes - Freedom of Speech PDFAntonio Angel HernandezNo ratings yet
- Sabitsana vs. MuerteguiDocument7 pagesSabitsana vs. MuerteguiElephantNo ratings yet
- 10 Constrcution Company-Bm2-Assingment-NocheDocument16 pages10 Constrcution Company-Bm2-Assingment-NocheJerick NocheNo ratings yet
- DO MigrateCisco2Juniper.V2Document105 pagesDO MigrateCisco2Juniper.V2Anderson OlivierNo ratings yet
- Biopsia Endoscopica Guiada Por UsDocument12 pagesBiopsia Endoscopica Guiada Por UsDavidNo ratings yet
- Kerala Education (Amendment) Rules, 2022Document7 pagesKerala Education (Amendment) Rules, 2022doniamuttamNo ratings yet
- DevOps Interview Questions - 1 PDFDocument224 pagesDevOps Interview Questions - 1 PDFNagapuri BalakrishnaNo ratings yet
- IT1802 Word AutoCorrect, Comments, Track Changes & CollaborationDocument1 pageIT1802 Word AutoCorrect, Comments, Track Changes & CollaborationRonibeMalinginNo ratings yet
- Silo Manufacturing CorporationDocument22 pagesSilo Manufacturing CorporationCee Phanthira100% (1)
- Philips MD1.2E AA ChasDocument84 pagesPhilips MD1.2E AA ChasimricsNo ratings yet
- A layman's guide to PowerShell remotingDocument42 pagesA layman's guide to PowerShell remotingJonathan KemperNo ratings yet