You might also like
- A2 : Revision Record Date: LTR Eco No: ApprovedDocument3 pagesA2 : Revision Record Date: LTR Eco No: Approvedapi-3696926No ratings yet
- CV Dang Minh PhuongDocument2 pagesCV Dang Minh Phuongapi-3696926No ratings yet
- LPC200Document1 pageLPC200api-3696926No ratings yet
- PXA270 RefDocument25 pagesPXA270 Refapi-3696926100% (3)
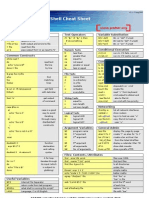
- Bash Script Cheat SheetDocument1 pageBash Script Cheat SheetHardeep Singh100% (1)
- UrlDocument1 pageUrlapi-3696926No ratings yet
- Cygwin GuideDocument6 pagesCygwin Guideapi-3696926100% (1)
- SfuDocument2 pagesSfuapi-3696926No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PT - English 5 - Q3Document8 pagesPT - English 5 - Q3GLENDA LABUGANo ratings yet
- Babylon The GreatDocument25 pagesBabylon The GreatJocelyn AndersenNo ratings yet
- Visual Arts Program Year 8 AussieDocument6 pagesVisual Arts Program Year 8 Aussieapi-408675345100% (1)
- Unlock Hidden Menu in Phoenix BIOS Setup Menu TutorialDocument10 pagesUnlock Hidden Menu in Phoenix BIOS Setup Menu TutorialSuper-Senior Pranksters100% (1)
- 3is Class Note (Lesson 2)Document17 pages3is Class Note (Lesson 2)Jun Elbert JaboliNo ratings yet
- Writing LessonDocument3 pagesWriting Lessonapi-351448195No ratings yet
- Types of Computers and SoftwareDocument2 pagesTypes of Computers and SoftwareMatrixNo ratings yet
- NintendoSwitch InterimVersion USDocument11 pagesNintendoSwitch InterimVersion USbossmzzanNo ratings yet
- Cambridge Assessment International Education: Global Perspectives and Research 9239/02 May/June 2018Document7 pagesCambridge Assessment International Education: Global Perspectives and Research 9239/02 May/June 2018Adelina ANo ratings yet
- Vizenor - Aesthetics of SurvivanceDocument19 pagesVizenor - Aesthetics of SurvivanceE. LewisNo ratings yet
- The First Test of The Second Term Class: 2am Duration:01H Full Name: MarkDocument2 pagesThe First Test of The Second Term Class: 2am Duration:01H Full Name: Markkaimero changNo ratings yet
- Visual Programming PROG2104C PDFDocument14 pagesVisual Programming PROG2104C PDFcovaNo ratings yet
- Jieun Kiaer - Emoji SpeakDocument217 pagesJieun Kiaer - Emoji SpeakAura BălanNo ratings yet
- Comp 122 Comp121 Cosf 122 Discrete StructuresDocument5 pagesComp 122 Comp121 Cosf 122 Discrete Structuresvictor kimutaiNo ratings yet
- 920 SH AVP Detail DescriptionDocument49 pages920 SH AVP Detail DescriptiondaraNo ratings yet
- Australian Scale For Asperger Syndrome PDFDocument5 pagesAustralian Scale For Asperger Syndrome PDFJovanka SolmosanNo ratings yet
- Testing and DebuggingDocument36 pagesTesting and DebuggingMuhammad YasirNo ratings yet
- Curriculum VitaeDocument6 pagesCurriculum VitaeJuris Kim A. ParingNo ratings yet
- Form 2 English lesson on talentsDocument8 pagesForm 2 English lesson on talentsAngela Clarence DingNo ratings yet
- Mohammad Saleemuddin KsaDocument4 pagesMohammad Saleemuddin KsaMohammed WasiuddinNo ratings yet
- 1001 Ferramentas de Inteligência ArtificialDocument151 pages1001 Ferramentas de Inteligência Artificialranierialmeida98No ratings yet
- Backend Task - Internship - Tanx - FiDocument2 pagesBackend Task - Internship - Tanx - Fikhushi dadhaniaNo ratings yet
- WebbyDocument12 pagesWebbyapi-327832679No ratings yet
- How To Install Windows Server 2003 Enterprise Edition As Vmware Virtual Machine For Installing Sap ECC 6.0Document11 pagesHow To Install Windows Server 2003 Enterprise Edition As Vmware Virtual Machine For Installing Sap ECC 6.0Joseph DeckerNo ratings yet
- Function of PhilosophyDocument18 pagesFunction of PhilosophyFranklin100% (1)
- Verbos en InglésDocument18 pagesVerbos en InglésJoel Gonzalez CruzNo ratings yet
- Icd Jan1Document325 pagesIcd Jan1Riyan NugrahaNo ratings yet
- Mybatis TutorialDocument69 pagesMybatis TutorialOvidiu Costinel DanciuNo ratings yet
- My Progress Booklet Student's Name: Teacher's Name: Course: English Can Do Objectives: Date: Unit: UNIT 11Document2 pagesMy Progress Booklet Student's Name: Teacher's Name: Course: English Can Do Objectives: Date: Unit: UNIT 11Lenin Chi-LiNo ratings yet
- Nagaya2006Topicality and Reference-Tracking in TagalogDocument15 pagesNagaya2006Topicality and Reference-Tracking in Tagalogapi-3732946No ratings yet