You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- ELEG 310L Prelab 3Document3 pagesELEG 310L Prelab 3ghaliaNo ratings yet
- Ault Finding Flow Chart For Motorcycle Charging Systems: StartDocument1 pageAult Finding Flow Chart For Motorcycle Charging Systems: StartcyberzarNo ratings yet
- Power Factor Improvement and Energy Conservation Through Intelligent Power Factor ControllerDocument5 pagesPower Factor Improvement and Energy Conservation Through Intelligent Power Factor ControllerMd Abdul Haq100% (1)
- Power Electronics (1) - ELE221: DR./ Abdelhady GhanemDocument13 pagesPower Electronics (1) - ELE221: DR./ Abdelhady GhanemAhmad Ash SharkawiNo ratings yet
- Lead TimeDocument5 pagesLead TimePramod ShawNo ratings yet
- Measurement of Three Phase Power - Electrical4UDocument4 pagesMeasurement of Three Phase Power - Electrical4UDr.Sakthivel SNo ratings yet
- ABB Modular Transformer DatasheetDocument12 pagesABB Modular Transformer DatasheetJunaidi SantosoNo ratings yet
- Nigam 11 KV Shunt CapacitorDocument13 pagesNigam 11 KV Shunt CapacitorSandeep SharmaNo ratings yet
- AMD 4 S-4135E Sep8.2016 PDFDocument4 pagesAMD 4 S-4135E Sep8.2016 PDFEsmaelyNo ratings yet
- Moeller on-OfF SwitchDocument5 pagesMoeller on-OfF SwitchR JNo ratings yet
- Protection Settings for #01 Startup/Standby TransformerDocument46 pagesProtection Settings for #01 Startup/Standby TransformerAmaresh NayakNo ratings yet
- Branch Circuit Calculations Feeders Services and Overcurrent DevicesDocument61 pagesBranch Circuit Calculations Feeders Services and Overcurrent DevicesVic Rizenn Isidore BobilesNo ratings yet
- VIDAR enDocument4 pagesVIDAR enadslainerNo ratings yet
- High Voltage Static Var Compensator and Other Power Electronics Products GuideDocument15 pagesHigh Voltage Static Var Compensator and Other Power Electronics Products Guidejoydeep_d3232No ratings yet
- Static Ups Testing.1Document5 pagesStatic Ups Testing.1322399mk7086No ratings yet
- HVDC PDFDocument16 pagesHVDC PDFraviNo ratings yet
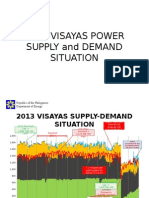
- 2013 Visayas Power Supply and Demand Situation: Republic of The Philippines Department of EnergyDocument10 pages2013 Visayas Power Supply and Demand Situation: Republic of The Philippines Department of EnergyJannet MalezaNo ratings yet
- Installation of Sub StationDocument44 pagesInstallation of Sub Stationanuj.cosmovoltNo ratings yet
- Brochure For BiomassDocument1 pageBrochure For BiomassSuganya LokeshNo ratings yet
- Electrical Load List: Mohammed N.M. Al-Baddah & PartnerDocument12 pagesElectrical Load List: Mohammed N.M. Al-Baddah & PartnerJesNo ratings yet
- User Manual-Eps 6000 Single-150-750Document80 pagesUser Manual-Eps 6000 Single-150-750Zam ZamNo ratings yet
- Starter and Alternator Component PartsDocument1,608 pagesStarter and Alternator Component PartsJessie Bechayda100% (1)
- Ships Electrical System - Rene Borstlap, Hans Ten Katen - V1Document224 pagesShips Electrical System - Rene Borstlap, Hans Ten Katen - V1Iulian90% (20)
- Seccionador SDF145WOESDocument1 pageSeccionador SDF145WOESMelvin Enoc Chavarría ZelayaNo ratings yet
- CV of Mir Sadat Ali-NhanceDocument3 pagesCV of Mir Sadat Ali-NhanceMukarramuddinNo ratings yet
- EE engineering exam bookletDocument16 pagesEE engineering exam bookletSrimannarayana NandamNo ratings yet
- GisDocument30 pagesGisAbdevil67% (3)
- Pilot Plant Operation Steam GenerationDocument23 pagesPilot Plant Operation Steam GenerationAzhan FikriNo ratings yet
- Chapter 10. Single-Phase and Three-Phase Alternating Current 161Document1 pageChapter 10. Single-Phase and Three-Phase Alternating Current 161warlen11No ratings yet