You might also like
- B TechDocument1 pageB TechShafi MohammadNo ratings yet
- DijkstraDocument5 pagesDijkstraapi-3839714No ratings yet
- CCS Program - FAQsDocument4 pagesCCS Program - FAQsShafi MohammadNo ratings yet
- Current Affairs Pre 2011 EnergyDocument6 pagesCurrent Affairs Pre 2011 EnergyShafi MohammadNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Type GTF Type GLF Type PTF Type SCF: Gate, Globe & Check Valves Class 150 - 600, 800 As Per ASME B16.34, API 602Document12 pagesType GTF Type GLF Type PTF Type SCF: Gate, Globe & Check Valves Class 150 - 600, 800 As Per ASME B16.34, API 602Qaswa Imran KhanNo ratings yet
- Cup 04 HSP Uk Web PDFDocument2 pagesCup 04 HSP Uk Web PDFcasda73No ratings yet
- Types of Elevators - Home Elevators - Residential Elevators - 1626693900854Document9 pagesTypes of Elevators - Home Elevators - Residential Elevators - 1626693900854Aluko Damilare MosesNo ratings yet
- NED Booklet 2015 ENDocument120 pagesNED Booklet 2015 ENElena JursinaNo ratings yet
- Road Crossing Method of StatementDocument4 pagesRoad Crossing Method of StatementKo Zay100% (1)
- Advanced Shape Memory Alloy Material Models For ANSYSDocument12 pagesAdvanced Shape Memory Alloy Material Models For ANSYSSlava SlesarenkoNo ratings yet
- Experiment No. 4 - Load Test On Impulse Water TurbineDocument4 pagesExperiment No. 4 - Load Test On Impulse Water TurbinerrameshsmitNo ratings yet
- (PDF) Metal Casting Processes QUALITATIVE PROBLEMS Trien Nguyen - Academia - EduDocument1 page(PDF) Metal Casting Processes QUALITATIVE PROBLEMS Trien Nguyen - Academia - EduAlii AlliNo ratings yet
- Earthquake DescriptorsDocument13 pagesEarthquake DescriptorsDiane Demariano Torcuator60% (5)
- Greenstar 25Si/30Si: User Instructions & Customer Care GuideDocument20 pagesGreenstar 25Si/30Si: User Instructions & Customer Care GuideJBNo ratings yet
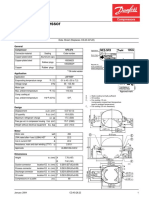
- NF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsDocument2 pagesNF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsMiguel CamposNo ratings yet
- AGMA 925-A03 - Effect of Lubrication On Gear Surface DistressDocument58 pagesAGMA 925-A03 - Effect of Lubrication On Gear Surface Distresssimone.castagnetti100% (2)
- As (One Touch)Document105 pagesAs (One Touch)carlos223344No ratings yet
- Models - Mph.pid ControlDocument14 pagesModels - Mph.pid ControlArunkumar SeshadriNo ratings yet
- Science: Quarter 3 - Module 1: FrictionDocument29 pagesScience: Quarter 3 - Module 1: FrictionTrisTan Dolojan100% (1)
- PACCAR MX Engine Reference Sheet PDFDocument2 pagesPACCAR MX Engine Reference Sheet PDFMalique ChamauneNo ratings yet
- Driving Without Wheels, Flying Without WingsDocument18 pagesDriving Without Wheels, Flying Without Wingsaditya_kumar_me100% (1)
- Full Length Test 1 Paper Civil Ki GoliDocument45 pagesFull Length Test 1 Paper Civil Ki GoliPankaj BadiwalNo ratings yet
- Mathematical Analysis of The Structure and Performance of An Automated Bread Slicing Machine PDFDocument7 pagesMathematical Analysis of The Structure and Performance of An Automated Bread Slicing Machine PDFIonut DumistrascuNo ratings yet
- Plate Mill ProcessDocument2 pagesPlate Mill ProcessVinay RajputNo ratings yet
- Powerplant Quizlet 492Document63 pagesPowerplant Quizlet 492Jecah Angelu S. SaquianNo ratings yet
- Icheme 141-01 Nothing Is Safety CriticalDocument10 pagesIcheme 141-01 Nothing Is Safety CriticalLiu YangtzeNo ratings yet
- Experienciasd en La Inspeccion de Calentadores de Aceite Termico Segun API RP573Document10 pagesExperienciasd en La Inspeccion de Calentadores de Aceite Termico Segun API RP573edgarmerchanNo ratings yet
- Conservation of Energy Worksheet #1 - 1Document3 pagesConservation of Energy Worksheet #1 - 1Alyssa ColeNo ratings yet
- A Literature Review On The Performance Analysis of 4 Stroke Diesel Engines With Ceramic Coating Material-36993 PDFDocument7 pagesA Literature Review On The Performance Analysis of 4 Stroke Diesel Engines With Ceramic Coating Material-36993 PDFShiva ShankarNo ratings yet
- Air Braking System in Indian RailwayDocument22 pagesAir Braking System in Indian RailwayClassic Printers100% (1)
- 87 s10Document12 pages87 s10carlosestayNo ratings yet
- Chung2006 PDFDocument9 pagesChung2006 PDFNguyen Tran HieuNo ratings yet
- Strength & failure modes of concreteDocument12 pagesStrength & failure modes of concretemaneeshaNo ratings yet
- DSS Site Visit ReportDocument13 pagesDSS Site Visit Report39 - Deep MandokarNo ratings yet