You might also like
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- 29 AP Negemo 2009 Wireless Mesh Networks 19122008Document9 pages29 AP Negemo 2009 Wireless Mesh Networks 19122008vanmai1974No ratings yet
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionFrom EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNo ratings yet
- Modelling and Simulation of Load Balancing in Computer NetworkDocument7 pagesModelling and Simulation of Load Balancing in Computer NetworkAJER JOURNALNo ratings yet
- Discussions, Conclusion and Further ExtensionDocument3 pagesDiscussions, Conclusion and Further ExtensionMin Nyi That TantNo ratings yet
- Energy Management in Wireless Sensor NetworksFrom EverandEnergy Management in Wireless Sensor NetworksRating: 4 out of 5 stars4/5 (1)
- Synopsis of M. Tech. Dissertation: Performance Comparison of AODV, OLSR and OFLSR in Wireless NetworksDocument12 pagesSynopsis of M. Tech. Dissertation: Performance Comparison of AODV, OLSR and OFLSR in Wireless Networksparmalik83No ratings yet
- An Efficient Approach To Support Qos and Bandwidth Efficiency inDocument9 pagesAn Efficient Approach To Support Qos and Bandwidth Efficiency inaoanh02No ratings yet
- Bandwidth RecyclingDocument4 pagesBandwidth RecyclingMahesh BabuNo ratings yet
- Interference-Aware Channel Assignment For Maximizing Throughput in WMNDocument12 pagesInterference-Aware Channel Assignment For Maximizing Throughput in WMNijansjournalNo ratings yet
- Autonomously Reconfiguring Failures in Wireless Mesh NetworksDocument4 pagesAutonomously Reconfiguring Failures in Wireless Mesh NetworksJournal of Computer ApplicationsNo ratings yet
- 000000da PDFDocument24 pages000000da PDFMukesh KumarNo ratings yet
- A Fuzzy Logic Based Network Dependent Routing Algorithm For Ad Hoc Wireless NetworksDocument10 pagesA Fuzzy Logic Based Network Dependent Routing Algorithm For Ad Hoc Wireless NetworksRavi ThejaNo ratings yet
- NCCT NCCT NCCT NCCT: IEEE Transaction Papers Abstract EnclosedDocument52 pagesNCCT NCCT NCCT NCCT: IEEE Transaction Papers Abstract EnclosedPawan KumarNo ratings yet
- 2 Sima Singh 6 13Document8 pages2 Sima Singh 6 13iisteNo ratings yet
- Performance Analysis of Routing Protocol in Wimax NetworkDocument5 pagesPerformance Analysis of Routing Protocol in Wimax Networkธนวรรณ โภคาอนนต์No ratings yet
- Thesis On Wireless Mesh NetworkDocument7 pagesThesis On Wireless Mesh Networktoniawallacelittlerock100% (3)
- A Comparison of Broadcast-Based and Switch-Based Networks of WorkstationsDocument8 pagesA Comparison of Broadcast-Based and Switch-Based Networks of WorkstationsMonisha OrisisNo ratings yet
- 31 - JCIT - JUNE - Binder1-31Document8 pages31 - JCIT - JUNE - Binder1-31Aditya WijayantoNo ratings yet
- Adaptive Clustering for Mobile Wireless NetworksDocument21 pagesAdaptive Clustering for Mobile Wireless NetworksPratyushNo ratings yet
- A Simple Pragmatic Approach to Mesh Routing Using BATMANDocument10 pagesA Simple Pragmatic Approach to Mesh Routing Using BATMANmozartatplayNo ratings yet
- Research Article: A Fuzzy Preprocessing Module For Optimizing The Access Network Selection in Wireless NetworksDocument10 pagesResearch Article: A Fuzzy Preprocessing Module For Optimizing The Access Network Selection in Wireless NetworksDaniela HossuNo ratings yet
- Research Article: A Fuzzy Preprocessing Module For Optimizing The Access Network Selection in Wireless NetworksDocument10 pagesResearch Article: A Fuzzy Preprocessing Module For Optimizing The Access Network Selection in Wireless NetworksDaniela HossuNo ratings yet
- Wireless mesh network: A communications network made up of radio nodes organized in a mesh topologyDocument6 pagesWireless mesh network: A communications network made up of radio nodes organized in a mesh topologyprabhat_praveenNo ratings yet
- Extending Wireless Range Using AODVDocument8 pagesExtending Wireless Range Using AODVSangita DharaNo ratings yet
- Performance Evaluation of AODV, DSDV & DSR Routing Protocol in Grid EnvironmentDocument8 pagesPerformance Evaluation of AODV, DSDV & DSR Routing Protocol in Grid EnvironmentkanjaiNo ratings yet
- IOSR JournalsDocument8 pagesIOSR JournalsInternational Organization of Scientific Research (IOSR)No ratings yet
- Enhanced Technique For Resource Allocation inDocument5 pagesEnhanced Technique For Resource Allocation ingoldenkumarNo ratings yet
- Optimal Dynamic Path Availability Mesh NetworksDocument63 pagesOptimal Dynamic Path Availability Mesh NetworksAmir AmirthalingamNo ratings yet
- Overlays On Wireless Mesh Networks: Implementation and Cross-Layer SearchingDocument12 pagesOverlays On Wireless Mesh Networks: Implementation and Cross-Layer SearchingEngr DanishNo ratings yet
- A Review of Current Routing Protocols For Ad Hoc Mobile Wireless NetworksDocument10 pagesA Review of Current Routing Protocols For Ad Hoc Mobile Wireless Networkskidxu2002No ratings yet
- Wireless Mesh RoutingDocument6 pagesWireless Mesh RoutingSatish NaiduNo ratings yet
- Abstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aDocument6 pagesAbstract: Due To Significant Advances in Wireless Modulation Technologies, Some MAC Standards Such As 802.11aVidvek InfoTechNo ratings yet
- Aodv VBRDocument72 pagesAodv VBRVijayalayachozhan Ayyapan100% (1)
- Architecture and Algorithms For An IEEE 802.11-Based Multi-Channel Wireless Mesh NetworkDocument12 pagesArchitecture and Algorithms For An IEEE 802.11-Based Multi-Channel Wireless Mesh Networknguyễn_quân_31No ratings yet
- MANET Literature ReviewDocument29 pagesMANET Literature Reviewengineeringwatch100% (2)
- Simulation & Analysis of Wired and Wireless Network PerformanceDocument7 pagesSimulation & Analysis of Wired and Wireless Network Performancehossam80No ratings yet
- Routing multimedia over WSN using ant colony optimizationDocument21 pagesRouting multimedia over WSN using ant colony optimizationteferi kassaNo ratings yet
- Optimisation of Multicast Routing in Wireless Mesh Networks: Brian Keegan, Karol Kowalik and Mark DavisDocument4 pagesOptimisation of Multicast Routing in Wireless Mesh Networks: Brian Keegan, Karol Kowalik and Mark DavisArun PrasathNo ratings yet
- Comparison of Routing Protocols For Ad H PDFDocument6 pagesComparison of Routing Protocols For Ad H PDFJet TruongNo ratings yet
- Queue-Aware Adaptive Resource Allocation For OFDMA Systems Supporting Mixed ServicesDocument7 pagesQueue-Aware Adaptive Resource Allocation For OFDMA Systems Supporting Mixed ServicesSameer SinghNo ratings yet
- RobortDocument36 pagesRobortKarpareddy BharathmohanreddyNo ratings yet
- Protocols For Self-Organization of A Wireless Sensor NetworkDocument24 pagesProtocols For Self-Organization of A Wireless Sensor NetworkMukesh KumarNo ratings yet
- A Multi-Radio Unification Protocol For IEEE 802.11 Wireless NetworksDocument11 pagesA Multi-Radio Unification Protocol For IEEE 802.11 Wireless NetworksAjinkya KaleNo ratings yet
- Efficient Routing Leach (Er-Leach) Enhanced On Leach Protocol in Wireless Sensor NetworksDocument7 pagesEfficient Routing Leach (Er-Leach) Enhanced On Leach Protocol in Wireless Sensor NetworksNahla SayedNo ratings yet
- Bandwidth Recycling in IEEE 802.16 Networks - 100Document9 pagesBandwidth Recycling in IEEE 802.16 Networks - 100raghueshNo ratings yet
- An Efficient Link Management Algorithm For High Mobility Mesh NetworksDocument8 pagesAn Efficient Link Management Algorithm For High Mobility Mesh NetworksHarshNo ratings yet
- 14 Performance Analysis of Wired and Wireless LANDocument5 pages14 Performance Analysis of Wired and Wireless LANSigula Galuh0% (1)
- Jurnal 10Document12 pagesJurnal 10Ahmad fadilNo ratings yet
- Research Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksDocument10 pagesResearch Article: Cross-Layer Support For Energy Efficient Routing in Wireless Sensor NetworksNaveen ChilamkurtiNo ratings yet
- Unit-5-Self Configuration and AutoconfigurationDocument17 pagesUnit-5-Self Configuration and AutoconfigurationSwati0% (1)
- Paper WimaxDocument16 pagesPaper Wimaxlobbita_utomoNo ratings yet
- Simulation-Based Performance Evaluation of Routing Protocols For Mobile Ad Hoc NetworksDocument11 pagesSimulation-Based Performance Evaluation of Routing Protocols For Mobile Ad Hoc NetworksMeenu HansNo ratings yet
- Wireless Mesh Network: Members Suman Raj Adhikari Saroj Raj RegmiDocument42 pagesWireless Mesh Network: Members Suman Raj Adhikari Saroj Raj RegmiJeena Mol AbrahamNo ratings yet
- Link Stability Based Handoff For Qos Provisioning in 4G NetworkDocument9 pagesLink Stability Based Handoff For Qos Provisioning in 4G NetworkInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Investigation and Addressing Unfairness in Wireless Mesh NetworksDocument11 pagesInvestigation and Addressing Unfairness in Wireless Mesh NetworksManaging Editor Journal of ComputingNo ratings yet
- Bandwidth Aggregation Architecture for Real-Time AppsDocument28 pagesBandwidth Aggregation Architecture for Real-Time Appssadam017No ratings yet
- Dynamic Channel Allocation For Effective Self Reconfigurable Wireless Mesh NetworkDocument5 pagesDynamic Channel Allocation For Effective Self Reconfigurable Wireless Mesh NetworkIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Lifetime CommunicationDocument19 pagesLifetime CommunicationsafaahahNo ratings yet
- Recorrection Cola-051935 Ns 065Document29 pagesRecorrection Cola-051935 Ns 065Vagish KirubaharanNo ratings yet
- 5G Technologies: MT Division Telecom Engineering Centre, DelhiDocument22 pages5G Technologies: MT Division Telecom Engineering Centre, DelhiTimmy Cheng0% (1)
- multirab ura signaling issuesDocument1 pagemultirab ura signaling issuessha0% (1)
- OnTime Owners ManualDocument44 pagesOnTime Owners ManualJames PowellNo ratings yet
- Umts Ranap ProtocolDocument7 pagesUmts Ranap Protocolrahulsingh_2998No ratings yet
- Design and Analysis of 2X2 Mimo System For 2.4 GHZ Ism Band ApplicationsDocument5 pagesDesign and Analysis of 2X2 Mimo System For 2.4 GHZ Ism Band ApplicationsRitupriya BobhateNo ratings yet
- Lecture Notes All TETE 3101 OCSDocument258 pagesLecture Notes All TETE 3101 OCSkwoba fredrickNo ratings yet
- PROFIBUS Standard for Fieldbus Communication in AutomationDocument1 pagePROFIBUS Standard for Fieldbus Communication in AutomationhenrytolentinoNo ratings yet
- Udm ProDocument7 pagesUdm ProRafael BorgesNo ratings yet
- Eudemon8000e (E8080E-E8160E) (000237)Document6 pagesEudemon8000e (E8080E-E8160E) (000237)Carlos Enrique Quispe PalominoNo ratings yet
- MP Contacts India ParliamentDocument51 pagesMP Contacts India ParliamentRahul BagariaNo ratings yet
- Certification Study Guide 301b PDFDocument205 pagesCertification Study Guide 301b PDFtototimesNo ratings yet
- Service Manual Fe-1: KV-25X5A KV-25X5B KV-25X5D KV-25X5E KV-25X5K KV-25X5L KV-25X5R KV-25X5UDocument8 pagesService Manual Fe-1: KV-25X5A KV-25X5B KV-25X5D KV-25X5E KV-25X5K KV-25X5L KV-25X5R KV-25X5UJasiekNo ratings yet
- ETSI TR 102 390: Transmission and Multiplexing (TM) Access Networks Requirements For The Support of Voice Over DSLDocument30 pagesETSI TR 102 390: Transmission and Multiplexing (TM) Access Networks Requirements For The Support of Voice Over DSLkurtovicNo ratings yet
- WPO-10 WCDMA Neighbor Cell, Scrambling Code and LAC Planning-47Document47 pagesWPO-10 WCDMA Neighbor Cell, Scrambling Code and LAC Planning-47Daksh Harsh0% (1)
- RTL8111C Data SheetDocument47 pagesRTL8111C Data SheetseahateNo ratings yet
- P02 - Procedure For Handling The RBS External & Internal AlarmsDocument3 pagesP02 - Procedure For Handling The RBS External & Internal AlarmsMangata AcaronarNo ratings yet
- Dedicated Connectivity Across India: National Private Leased Circuit (NPLC)Document4 pagesDedicated Connectivity Across India: National Private Leased Circuit (NPLC)Anonymous ipe1FbRfFZNo ratings yet
- ToP MonitoringDocument52 pagesToP MonitoringEd MulNo ratings yet
- Mtctce - Mikrotik Certified Traffic Control Engineer: Certificación Oficial MikrotikDocument4 pagesMtctce - Mikrotik Certified Traffic Control Engineer: Certificación Oficial MikrotikAdnan SulejmanovicNo ratings yet
- RF Device DataDocument1,388 pagesRF Device Datasergecheshut100% (2)
- 1 Juniper - MX Series 5G Universal Routing PlatformsDocument14 pages1 Juniper - MX Series 5G Universal Routing PlatformsBullzeye StrategyNo ratings yet
- RS 485 25a ManDocument8 pagesRS 485 25a MansitronixexNo ratings yet
- Simulation de PCM, DPCM y DM SimulinkDocument6 pagesSimulation de PCM, DPCM y DM SimulinkМигель Кастижо0% (1)
- SL-53625 Rev02 07-08Document111 pagesSL-53625 Rev02 07-08Abdul Aziz ShawnNo ratings yet
- HM List of CorrespondentsDocument83 pagesHM List of CorrespondentsLaura ParkaNo ratings yet
- Implementation of Wireless LAN Using Cisco Packet TracerDocument5 pagesImplementation of Wireless LAN Using Cisco Packet TracerN KNo ratings yet
- AWY 9400 ManualDocument47 pagesAWY 9400 ManualhichhonglyNo ratings yet
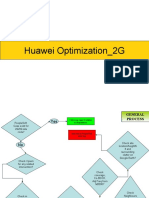
- Process of Optimization - HuaweiDocument22 pagesProcess of Optimization - HuaweiTshego MasegoNo ratings yet
- Telstar Press KitDocument31 pagesTelstar Press KitBob AndrepontNo ratings yet
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- CCST Cisco Certified Support Technician Study Guide: Networking ExamFrom EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamNo ratings yet
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366From EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366No ratings yet
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsFrom EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsNo ratings yet
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The E-Commerce Book: Building the E-EmpireFrom EverandThe E-Commerce Book: Building the E-EmpireRating: 5 out of 5 stars5/5 (1)