You might also like
- Simple FSKDocument6 pagesSimple FSKFaten AliNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- AND8241/D A 5.0 V/2.0 A Standby Power Supply For INTEL Compliant ATX ApplicationsDocument16 pagesAND8241/D A 5.0 V/2.0 A Standby Power Supply For INTEL Compliant ATX ApplicationsJonatan LunaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
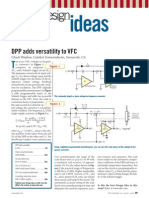
- Voltage To Frequency ConverterDocument7 pagesVoltage To Frequency ConverterRodfer SorianoNo ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- Low Cost LCD Frequency MeterDocument54 pagesLow Cost LCD Frequency MeterSumit AgarwalNo ratings yet
- EDN Design Ideas 2006Document142 pagesEDN Design Ideas 2006chag1956100% (1)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- DiDocument5 pagesDiTao Quang BinhNo ratings yet
- Electronics Explained: Fundamentals for Engineers, Technicians, and MakersFrom EverandElectronics Explained: Fundamentals for Engineers, Technicians, and MakersRating: 5 out of 5 stars5/5 (5)
- 1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GlcbxuDocument9 pages1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: Glcbxutv_romeoNo ratings yet
- Technical Brief 417: Converter ParametersDocument1 pageTechnical Brief 417: Converter ParametersdiegoifgNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- 1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDDocument9 pages1.25Gbps SFP Bi-Directional Transceiver, 20km Reach: GLCBXDtv_romeoNo ratings yet
- High-Speed-Board Design Techniques: Application NoteDocument28 pagesHigh-Speed-Board Design Techniques: Application NoteMicle MarianNo ratings yet
- Highway Speed CheckerDocument24 pagesHighway Speed Checkerritesh chauhanNo ratings yet
- 5051 AppDocument37 pages5051 AppawemetalNo ratings yet
- Chapter Three Design and Analysis of The Various Units of The Circuit 3.1 IntrodutionDocument16 pagesChapter Three Design and Analysis of The Various Units of The Circuit 3.1 Introdutiondamyl4sure9577No ratings yet
- Breadboard Experiments NImyDAQ and MultisimDocument84 pagesBreadboard Experiments NImyDAQ and MultisimmadangkNo ratings yet
- Integrated Circuit Systems, IncDocument11 pagesIntegrated Circuit Systems, Incroger marqNo ratings yet
- Panasonic LCD (2012) TX-l55wt50 (La34)Document67 pagesPanasonic LCD (2012) TX-l55wt50 (La34)Jacob EvansNo ratings yet
- mPC8112TB - Data SheetDocument20 pagesmPC8112TB - Data SheetbigirimwNo ratings yet
- 2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWDocument8 pages2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWtv_romeoNo ratings yet
- Circuits Docs Labs Lab3 First and Second Order ResponsesDocument8 pagesCircuits Docs Labs Lab3 First and Second Order ResponsesCesar Santiago Bolaño SalazarNo ratings yet
- EDN Design Ideas 2001Document182 pagesEDN Design Ideas 2001chag1956100% (5)
- Sfpgel: 1.25Gbps SFP Optical Transceiver, 20km ReachDocument8 pagesSfpgel: 1.25Gbps SFP Optical Transceiver, 20km Reachtv_romeoNo ratings yet
- Digital DDS Generator With AD9850 Chip DDS From SQ5RWQDocument4 pagesDigital DDS Generator With AD9850 Chip DDS From SQ5RWQag1tatorNo ratings yet
- 2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWDocument8 pages2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWtv_romeoNo ratings yet
- Application Note An-1052: Using The Ir217X Linear Current Sensing IcsDocument7 pagesApplication Note An-1052: Using The Ir217X Linear Current Sensing IcsLullaby summerNo ratings yet
- EDN Design Ideas 2002Document198 pagesEDN Design Ideas 2002chag1956100% (1)
- An1028 PDFDocument2 pagesAn1028 PDFkuazu100% (1)
- EECS267B Proj3Document19 pagesEECS267B Proj3hellwellNo ratings yet
- 1.25Gbps SFP Optical Transceiver, 80km Reach: SfpgezDocument8 pages1.25Gbps SFP Optical Transceiver, 80km Reach: Sfpgeztv_romeoNo ratings yet
- ADE7753 EvalBoardDocument20 pagesADE7753 EvalBoardRicardo Hyppolite FleriscatNo ratings yet
- Tda 7294Document17 pagesTda 7294Abubakar SidikNo ratings yet
- EE3408E Project Design A Two-Stage Operational AmplifierDocument4 pagesEE3408E Project Design A Two-Stage Operational AmplifierLaSo ASNo ratings yet
- Viper22a Equivalent PDFDocument16 pagesViper22a Equivalent PDFXande Nane Silveira0% (1)
- 4.9-5.9 GHZ High-Linearity Power Amplifier: Features ApplicationsDocument18 pages4.9-5.9 GHZ High-Linearity Power Amplifier: Features ApplicationsNicola CardinNo ratings yet
- An 477Document28 pagesAn 477radaresNo ratings yet
- CN0217Document6 pagesCN0217alraca1234No ratings yet
- Land Use Services DepartmentDocument20 pagesLand Use Services DepartmentJesusSQANo ratings yet
- Report - RFid Based Security SystemDocument46 pagesReport - RFid Based Security SystemDhaval Rana50% (6)
- Doc of Automatic Load Sharing of TransformersDocument136 pagesDoc of Automatic Load Sharing of TransformersVeda Komakula56% (9)
- DocumentDocument66 pagesDocumentManasa KilaruNo ratings yet
- AD831Document16 pagesAD831Vicent Ortiz GonzalezNo ratings yet
- Ultra-Low: Power Silicon-on-Sapphire Energy-ScavengingDocument4 pagesUltra-Low: Power Silicon-on-Sapphire Energy-ScavengingGurkaranjot SinghNo ratings yet
- MC44817Document8 pagesMC44817felipefreeNo ratings yet
- Specification FOR Approval: 15.6" FHD TFT LCD TitleDocument34 pagesSpecification FOR Approval: 15.6" FHD TFT LCD TitleflatformNo ratings yet
- 25638-Acquire Images With A Sensor and A Micro Controller PDFDocument5 pages25638-Acquire Images With A Sensor and A Micro Controller PDFSzilagyi SebaNo ratings yet
- DS1307 Real Time ClockDocument14 pagesDS1307 Real Time Clockpraveen_kodgirwarNo ratings yet
- Use A Transistor As A Heater PDFDocument5 pagesUse A Transistor As A Heater PDFFlorin Marica100% (1)
- Lab Manual ElectronicsDocument57 pagesLab Manual ElectronicsNaveen Rockzz Bhavans100% (2)
- Chapter 6Document42 pagesChapter 6Henry MaedaNo ratings yet
- Dc3x00 ManualDocument24 pagesDc3x00 ManualJoel Valmiki Sánchez MontesNo ratings yet
- Design and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)Document23 pagesDesign and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)uzair aminNo ratings yet
- Atmega Bench Power SupplyDocument31 pagesAtmega Bench Power SupplySougata Das100% (2)
- Secondary Storage IntroductionDocument82 pagesSecondary Storage IntroductionharisiddhanthiNo ratings yet
- Chapter 03 ARM MPU SubsystemDocument12 pagesChapter 03 ARM MPU SubsystemkzillaNo ratings yet
- Bca SyllabusDocument33 pagesBca SyllabuspratheepaNo ratings yet
- PLC and Industrial Networking PDFDocument12 pagesPLC and Industrial Networking PDFSuzaini SupingatNo ratings yet
- Install and Configure Redhat Virtualization (RHEV)Document4 pagesInstall and Configure Redhat Virtualization (RHEV)Benjamin RualthanzauvaNo ratings yet
- Dell Vostro A840 A860 A1088 Quanta Vm9 Vm8 Rev 1a SCHDocument46 pagesDell Vostro A840 A860 A1088 Quanta Vm9 Vm8 Rev 1a SCHRodolfo ArosemenaNo ratings yet
- FPC88-0167-02 - Readme - LIFEBOOK E556 - Windows 7 64-Bit - ZHTWHK - EN-FullDocument7 pagesFPC88-0167-02 - Readme - LIFEBOOK E556 - Windows 7 64-Bit - ZHTWHK - EN-Fullhunghl9726No ratings yet
- Anti Rolling Gyro Installation ARG250TDocument95 pagesAnti Rolling Gyro Installation ARG250TEmre Şahin TepebaşNo ratings yet
- Lenovo ThinkCentre M58 Hardware Maintenance Manual PDFDocument348 pagesLenovo ThinkCentre M58 Hardware Maintenance Manual PDFBimo BimzNo ratings yet
- BMW CodesDocument1 pageBMW CodesJake Berrier0% (2)
- ProjectsDocument16 pagesProjectsdahlia2sallyNo ratings yet
- DSE7110 DSE7120 MKII Operators ManualDocument100 pagesDSE7110 DSE7120 MKII Operators ManualJames100% (4)
- Egate-2000 MNDocument326 pagesEgate-2000 MNprajeeshckNo ratings yet
- Serial and Parallel CommunicationDocument21 pagesSerial and Parallel CommunicationHari KrishNo ratings yet
- Transcell TCS 3LCD User GuideENGLISH REV13Document20 pagesTranscell TCS 3LCD User GuideENGLISH REV13Gudalupe Flores MoralesNo ratings yet
- Wireless Half Duplex Intercom ProposalDocument12 pagesWireless Half Duplex Intercom ProposalMarimar AuditorNo ratings yet
- Module 1 NotesDocument35 pagesModule 1 NotesSANATH BHAT S MNo ratings yet
- Clevo D900C D901CDocument100 pagesClevo D900C D901CEdson HenriqueNo ratings yet
- Sitehawk™ Analyzer Sk-4500: Operation ManualDocument65 pagesSitehawk™ Analyzer Sk-4500: Operation ManualOscar GuarnizoNo ratings yet
- C Programming Basics Questions and AnswersDocument7 pagesC Programming Basics Questions and AnswerskathirdcnNo ratings yet
- (IBM) FlashSystem V9000 Model AC3 With Flash Enclosure Model AE3 Product GuideDocument64 pages(IBM) FlashSystem V9000 Model AC3 With Flash Enclosure Model AE3 Product Guidehiehie272No ratings yet
- Mazatrol Matrix Nexus Connection and Maintenance ManualDocument155 pagesMazatrol Matrix Nexus Connection and Maintenance ManualAlex Man100% (4)
- Midterm PracticeDocument7 pagesMidterm PracticeZhang YoudanNo ratings yet
- Panasonic Kx-Tda100bx Hybrid Ip-PbxDocument96 pagesPanasonic Kx-Tda100bx Hybrid Ip-PbxluisNo ratings yet
- Manual ID 800Document7 pagesManual ID 800akibae0% (1)
- Visual Pinball and FPLaunch InstructionsDocument4 pagesVisual Pinball and FPLaunch InstructionsircNo ratings yet
- Cubieboard Serial Conection TTLDocument4 pagesCubieboard Serial Conection TTLsaladfingers8989No ratings yet
- ME1001, ME1004, ME1005 - Basic Mech+Graphics+Workshop Pract.Document6 pagesME1001, ME1004, ME1005 - Basic Mech+Graphics+Workshop Pract.Mayank AgarwalNo ratings yet
- Capacitive Round Corner Touch MonitorDocument4 pagesCapacitive Round Corner Touch MonitorBrahim AitchrifNo ratings yet
- Single Side BandDocument12 pagesSingle Side BandApril RodriquezNo ratings yet
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...From EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosFrom EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosRating: 5 out of 5 stars5/5 (1)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsFrom EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsNo ratings yet
- Power System Control and ProtectionFrom EverandPower System Control and ProtectionB. Don RussellRating: 4 out of 5 stars4/5 (11)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceFrom EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceNo ratings yet
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 4.5 out of 5 stars4.5/5 (10)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)From EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Rating: 4 out of 5 stars4/5 (2)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Build Your Own Electronics WorkshopFrom EverandBuild Your Own Electronics WorkshopRating: 3.5 out of 5 stars3.5/5 (3)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldFrom EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldRating: 4 out of 5 stars4/5 (87)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)