You might also like
- Vignettes in PhysicsDocument1 pageVignettes in Physicsvarun_009No ratings yet
- What Is NeurobicsDocument6 pagesWhat Is Neurobicsvarun_009No ratings yet
- Physical Layer Specification: EcificationsDocument32 pagesPhysical Layer Specification: Ecificationsvarun_009No ratings yet
- 10 1 1 189Document8 pages10 1 1 189varun_009No ratings yet
- FrictionDocument20 pagesFrictionvarun_009No ratings yet
- Embedded SyllabusDocument7 pagesEmbedded SyllabusAshok CyrilNo ratings yet
- Morse Code SignalsDocument2 pagesMorse Code SignalsDivya Bhanu Singh RajawatNo ratings yet
- Signal Integrity EngineerDocument2 pagesSignal Integrity Engineervarun_009No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2 Induction Installations PDFDocument41 pages2 Induction Installations PDFAndoni Garcia MatxainNo ratings yet
- Walter H. SchottkyDocument3 pagesWalter H. SchottkyAmol VedpathakNo ratings yet
- Introduction To Electronics: Electronic Devices Lesson 0.0Document16 pagesIntroduction To Electronics: Electronic Devices Lesson 0.0Yves CaraangNo ratings yet
- Shunt ReactorDocument4 pagesShunt ReactorShruti JoshiNo ratings yet
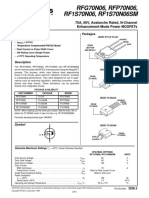
- Rfg70N06, Rfp70N06, Rf1S70N06, Rf1S70N06Sm: 70A, 60V, Avalanche Rated, N-Channel Enhancement-Mode Power MosfetsDocument6 pagesRfg70N06, Rfp70N06, Rf1S70N06, Rf1S70N06Sm: 70A, 60V, Avalanche Rated, N-Channel Enhancement-Mode Power MosfetsRomário CaribéNo ratings yet
- TOP244Y Power IntegrationsDocument52 pagesTOP244Y Power IntegrationsĐá Tảng Đá CuộiNo ratings yet
- Bascom Avr TheoryDocument867 pagesBascom Avr Theory20javier83% (6)
- Synthesis of Nata de Coco Fiber Composite With Conductive Filler As An Eco-Friendly Semiconductor MaterialDocument7 pagesSynthesis of Nata de Coco Fiber Composite With Conductive Filler As An Eco-Friendly Semiconductor MaterialDevit Hari AshariNo ratings yet
- Motor ControllerDocument7 pagesMotor ControllerOnupamNo ratings yet
- CT For Protection: Prof.O.V.Gnana SwathikaDocument24 pagesCT For Protection: Prof.O.V.Gnana SwathikaSarthak VatsNo ratings yet
- Water Level Indicator With Alarms Using PIC MicrocontrollerDocument5 pagesWater Level Indicator With Alarms Using PIC MicrocontrollerAJER JOURNALNo ratings yet
- IRS2106/IRS21064 high and low side driver datasheetDocument25 pagesIRS2106/IRS21064 high and low side driver datasheetmohamedNo ratings yet
- Ap7173 35627Document16 pagesAp7173 35627Jose Barroso GuerraNo ratings yet
- Tps 65192Document25 pagesTps 65192MoscandoNo ratings yet
- Ug470 7series ConfigDocument176 pagesUg470 7series ConfigRakesh KhannaNo ratings yet
- Touch and Go: Easily Add Capacitive Sense To Just About AnythingDocument10 pagesTouch and Go: Easily Add Capacitive Sense To Just About AnythingsilabsproductsNo ratings yet
- SCAPS Introduction PDFDocument29 pagesSCAPS Introduction PDFIng Hugo César Ramos LópezNo ratings yet
- PSIM IGBT Loss Calculation Using Thermal ModuleDocument7 pagesPSIM IGBT Loss Calculation Using Thermal ModulecpdsklsdeNo ratings yet
- Quantum Qd110 SpecsheetDocument2 pagesQuantum Qd110 SpecsheetElectromateNo ratings yet
- Calculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL StarterDocument5 pagesCalculate Size of Contactor, Fuse, C.B, Over Load Relay of DOL Startererson1981No ratings yet
- D 8020 L RectifierDocument4 pagesD 8020 L RectifierhdquanNo ratings yet
- Sensors in WordDocument14 pagesSensors in WorddawitNo ratings yet
- Data SheetDocument44 pagesData SheetKendje MatsumotoNo ratings yet
- Fundamentals of Adiabatic Logic: 2.1 The Charging Process in Adiabatic Logic Compared To Static CMOSDocument19 pagesFundamentals of Adiabatic Logic: 2.1 The Charging Process in Adiabatic Logic Compared To Static CMOSparsa_coaNo ratings yet
- Applied Energy: Hubert Hug, Michael Bader, Peter Mair, Thilo GlatzelDocument10 pagesApplied Energy: Hubert Hug, Michael Bader, Peter Mair, Thilo Glatzel蒲俊雄No ratings yet
- ASAP-2 Almost Simple As Possible Computer SchematicDocument1 pageASAP-2 Almost Simple As Possible Computer Schematicpong74lsNo ratings yet
- TTC 5200Document5 pagesTTC 5200Jose M PeresNo ratings yet
- Datasheet FDS 2572Document12 pagesDatasheet FDS 2572pasaNo ratings yet
- Sensitive Gate SCR Features Low Holding Current of 5 mADocument5 pagesSensitive Gate SCR Features Low Holding Current of 5 mAMounith HNo ratings yet
- Physics Investigatory Project: Light Emitting Diode (Led)Document18 pagesPhysics Investigatory Project: Light Emitting Diode (Led)ksNo ratings yet