You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- U217BDocument11 pagesU217BAnonymous JR1LSmN0sNo ratings yet
- Universal DC/DC Converter: (Top View)Document11 pagesUniversal DC/DC Converter: (Top View)Engine Tuning UpNo ratings yet
- Bu808 DatasheetDocument8 pagesBu808 Datasheetvoris115No ratings yet
- Transformer Driver For Isolated Power Supplies: Features ApplicationsDocument29 pagesTransformer Driver For Isolated Power Supplies: Features Applicationsngongpro27No ratings yet
- 6-Pin Dip Optocouplers For Power Supply Applications (No Base Connection)Document11 pages6-Pin Dip Optocouplers For Power Supply Applications (No Base Connection)Alan Bastos LemeNo ratings yet
- T2117 - Zero-Voltage Switch With Adjustable RampDocument16 pagesT2117 - Zero-Voltage Switch With Adjustable Rampapaixao666No ratings yet
- 16CTQ... 16CTQ... S 16CTQ... - 1: Schottky Rectifier 16 AmpDocument9 pages16CTQ... 16CTQ... S 16CTQ... - 1: Schottky Rectifier 16 AmpBruno NascimentoNo ratings yet
- Ap 34063Document10 pagesAp 34063Hoang LeNo ratings yet
- Datasheet T2117Document16 pagesDatasheet T2117Radovan RasaNo ratings yet
- PC814 Series: AC Input PhotocouplerDocument6 pagesPC814 Series: AC Input PhotocouplerAngel David Barranco VergaraNo ratings yet
- K 1010Document6 pagesK 1010Florangely CastañedaNo ratings yet
- Optoacoplador Cosmo k1010Document6 pagesOptoacoplador Cosmo k1010prozincoNo ratings yet
- Pbyr2545ct CTB Cte-05Document14 pagesPbyr2545ct CTB Cte-05jlqhalconNo ratings yet
- Tda 4601Document8 pagesTda 4601Mirko AleksicNo ratings yet
- Gt8 Exciter SettingsDocument54 pagesGt8 Exciter SettingsJhon Wesly BangunNo ratings yet
- Variatore Di TensioneDocument12 pagesVariatore Di Tensioneconti51No ratings yet
- UC3843 DatasheetDocument13 pagesUC3843 DatasheetBigbrain99No ratings yet
- UC3845Document13 pagesUC3845roozbehxoxNo ratings yet
- Bu 808 DfiDocument7 pagesBu 808 DfiIoan Octavian StanciuNo ratings yet
- Datasheet DC MotorDocument9 pagesDatasheet DC MotorKosala KapukotuwaNo ratings yet
- DMV1500SDDocument8 pagesDMV1500SDJohnNo ratings yet
- Isolated Flyback Switching Regulator W - 9V OutputDocument16 pagesIsolated Flyback Switching Regulator W - 9V OutputCasey DialNo ratings yet
- TV East/West Correction Circuit For Square Tubes: Features Summary Figure 1. PackageDocument10 pagesTV East/West Correction Circuit For Square Tubes: Features Summary Figure 1. PackageCristian AguirreNo ratings yet
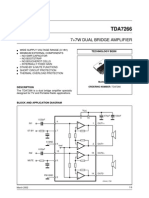
- Tda 7266Document9 pagesTda 7266hawarnetNo ratings yet
- Tda 7266Document9 pagesTda 7266Miloud ChouguiNo ratings yet
- Tda 2170Document8 pagesTda 2170ricdem11_42047No ratings yet
- Part ListDocument3 pagesPart ListJo LingatongNo ratings yet
- lm555 DatasheetDocument11 pageslm555 DatasheetKhu GhingNo ratings yet
- Electronics Soalan Measurement MySkills Akhir 2011Document14 pagesElectronics Soalan Measurement MySkills Akhir 2011Afdzam AzuraNo ratings yet
- 12V DC To 40V DC Converter Circuit DiagramDocument10 pages12V DC To 40V DC Converter Circuit DiagramAhdiat Darmawan LubisNo ratings yet
- L200CV PDFDocument12 pagesL200CV PDFCarlo MeloniNo ratings yet
- Induction Motor DrivesDocument30 pagesInduction Motor DrivesAmit KumarNo ratings yet
- STTH212: High Voltage Ultrafast DiodeDocument9 pagesSTTH212: High Voltage Ultrafast DiodeonafetsNo ratings yet
- Tda 7266Document9 pagesTda 7266huitlamenNo ratings yet
- LM358Document7 pagesLM358DeCastro07No ratings yet
- l200 AppDocument13 pagesl200 AppZoran TesinovicNo ratings yet
- LM 200Document13 pagesLM 200dulocoNo ratings yet
- Date: 17/7/2008: RLC Response of Step InputDocument32 pagesDate: 17/7/2008: RLC Response of Step InputARVINDNo ratings yet
- XR-215 PLLDocument32 pagesXR-215 PLLJ Jesús Villanueva GarcíaNo ratings yet
- 1.5A Step Down Switching Regulator: 1 FeaturesDocument13 pages1.5A Step Down Switching Regulator: 1 FeaturesFernando SosaNo ratings yet
- BDW 94 CFPDocument4 pagesBDW 94 CFPNegru P. PlantatieNo ratings yet
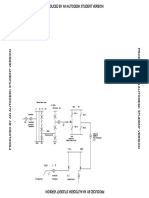
- ECCE4466: Power Electronics Student Lab Manual: Department of Electrical and Computer EngineeringDocument20 pagesECCE4466: Power Electronics Student Lab Manual: Department of Electrical and Computer Engineeringsenpai_mendozaNo ratings yet
- IRG4BC30K-S: Features Features Features Features FeaturesDocument8 pagesIRG4BC30K-S: Features Features Features Features FeaturesRafael MonzonNo ratings yet
- Voltage-Controlled Oscillator: ... The Analog Plus CompanyDocument24 pagesVoltage-Controlled Oscillator: ... The Analog Plus CompanyMoltrevNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Marine Electrical Practice: Marine Engineering SeriesFrom EverandMarine Electrical Practice: Marine Engineering SeriesRating: 4 out of 5 stars4/5 (8)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- 402-91-EL-LIS-00003 Rev A1Document3 pages402-91-EL-LIS-00003 Rev A1Krishnan KrishNo ratings yet
- 11kv BB1Document1 page11kv BB1Hammadiqbal12No ratings yet
- RTCCDocument9 pagesRTCCer_ashutosh87No ratings yet
- Solar BoqDocument40 pagesSolar BoqDaniel OkereNo ratings yet
- WH 14Dsl WR 14Dsl: ModelsDocument54 pagesWH 14Dsl WR 14Dsl: ModelsCata StefanNo ratings yet
- Electrical Safety ClearanceDocument23 pagesElectrical Safety Clearanceosvald97No ratings yet
- Panasonic Microwave InverterDocument17 pagesPanasonic Microwave Inverterboroda2410No ratings yet
- Electrical System: Ef & Ec SectionDocument50 pagesElectrical System: Ef & Ec SectionRidwan syahNo ratings yet
- SG30 - 33 - 40 - 50CX - 30 - 50CX-NI User ManualDocument127 pagesSG30 - 33 - 40 - 50CX - 30 - 50CX-NI User ManualKamila NunesNo ratings yet
- Grid1 - Final-Report - GR1S - CompleteDocument3 pagesGrid1 - Final-Report - GR1S - CompleteAbdel-Rahman Saifedin ArandasNo ratings yet
- Load Calculation Football Stadium, GodawariDocument28 pagesLoad Calculation Football Stadium, GodawariRoshan KejariwalNo ratings yet
- 5n4IpUPS Guideline HandbookDocument28 pages5n4IpUPS Guideline HandbooksaifulNo ratings yet
- AREVA Relay Test Format ModifDocument97 pagesAREVA Relay Test Format ModifAUHEBEZNo ratings yet
- Transformer Success ModificationDocument1 pageTransformer Success Modificationv6656No ratings yet
- Characteristics: Compact Size Ideal For Any Type of UseDocument3 pagesCharacteristics: Compact Size Ideal For Any Type of UseVanegas YennyNo ratings yet
- Smart Ester ManualDocument7 pagesSmart Ester ManualrefnoredcardNo ratings yet
- Micro Switch (2nd Edition) ManualDocument2 pagesMicro Switch (2nd Edition) ManualFDTNo ratings yet
- 200 500 Su PDFDocument150 pages200 500 Su PDFElvis Eliud HernándezNo ratings yet
- A0019218 - DS - SwitchDocument1 pageA0019218 - DS - SwitchCường LêNo ratings yet
- AC AC TransformerDocument4 pagesAC AC TransformerKevin GianeNo ratings yet
- Transformers: What Is An Electric Transformer?Document14 pagesTransformers: What Is An Electric Transformer?Mohamed IbrahemNo ratings yet
- Power Transmission and DistributionDocument50 pagesPower Transmission and DistributionGhayath OmerNo ratings yet
- Manual Energy MeterDocument1 pageManual Energy Meterda88No ratings yet
- Timers/time Switches: ElectricalDocument52 pagesTimers/time Switches: ElectricaledgonNo ratings yet
- Utilasation of Electrical Energy: Lecture NotesDocument57 pagesUtilasation of Electrical Energy: Lecture NotesNarendra VermaNo ratings yet
- 884-Aux Generator SpareDocument2 pages884-Aux Generator SpareAhmed HamdyNo ratings yet
- Ups - 3000vaDocument1 pageUps - 3000vaAnas A.GhannamNo ratings yet
- Rotating Rectifier - TestDocument10 pagesRotating Rectifier - TestDjebali Mourad100% (1)
- Frako KBR Compensare ComponenteDocument62 pagesFrako KBR Compensare ComponenteMilton HernandezNo ratings yet
- No Voltage Type of Cable Remarks: Low Voltage Power Cable Plant A. Power CableDocument5 pagesNo Voltage Type of Cable Remarks: Low Voltage Power Cable Plant A. Power CableHendrias ari sujarwoNo ratings yet