You might also like
- A 6-b 1-GS/s 30-mW ADC in 90-nm CMOS Technology: Yuan-Ching Lien and Jri Lee National Taiwan University, Taipei, TaiwanDocument4 pagesA 6-b 1-GS/s 30-mW ADC in 90-nm CMOS Technology: Yuan-Ching Lien and Jri Lee National Taiwan University, Taipei, TaiwanSunil PandeyNo ratings yet
- A 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS TechnologyDocument4 pagesA 1.8V 12-Bit 230-MS/s Pipeline ADC in 0.18 M CMOS Technologyfaithfully_fatihNo ratings yet
- An-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcsDocument8 pagesAn-742 Application Note: Frequency Domain Response of Switched-Capacitor AdcskabuslagakNo ratings yet
- 12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsDocument6 pages12-Bit Low-Power Fully Differential Switched Capacitor Noncalibrating Successive Approximation ADC With 1 MSsThanos van RamNo ratings yet
- A 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error CompensationDocument3 pagesA 10b 100MS S 1.13mW SAR ADC With Binary-Scaled Error Compensation陳昀顥No ratings yet
- Design and Implementation of A 10 Bit SAR ADCDocument4 pagesDesign and Implementation of A 10 Bit SAR ADCVipul ChauhanNo ratings yet
- A High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersDocument4 pagesA High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersJessyNo ratings yet
- A Low Power, and Low Signal 5-Bit 25msamples/s Pipelined ADC For Monolithic Active PixelsDocument5 pagesA Low Power, and Low Signal 5-Bit 25msamples/s Pipelined ADC For Monolithic Active Pixelstajmjcet_123No ratings yet
- Design of An ADC Using High Precision Comparator With Time Domain Offset CancellationDocument4 pagesDesign of An ADC Using High Precision Comparator With Time Domain Offset CancellationijtetjournalNo ratings yet
- 07 - Chapter 4Document45 pages07 - Chapter 4SriramNo ratings yet
- A 1-GS/s CMOS 6-Bit Flash ADC With An Offset Calibrating MethodDocument4 pagesA 1-GS/s CMOS 6-Bit Flash ADC With An Offset Calibrating MethodSunil PandeyNo ratings yet
- A 12-Bit 40 MS/s Pipelined ADC With Over 80 DB SFDR: Wei Qi, Yin Xiumei, Han Dandan, and Yang HuazhongDocument5 pagesA 12-Bit 40 MS/s Pipelined ADC With Over 80 DB SFDR: Wei Qi, Yin Xiumei, Han Dandan, and Yang HuazhongfirpealNo ratings yet
- P109 113 PDFDocument5 pagesP109 113 PDFSuraj Kumar PrustyNo ratings yet
- A 10-Gbps CMOS Merged Adaptive Equalizer CDR Circuit For Serial-Link ReceiversDocument2 pagesA 10-Gbps CMOS Merged Adaptive Equalizer CDR Circuit For Serial-Link ReceiversYang YouNo ratings yet
- A Low-Power, Ultra Low-Offset, 16.5-Bit DS ADC For Coulomb Counting and Fuel Gauge ApplicationDocument4 pagesA Low-Power, Ultra Low-Offset, 16.5-Bit DS ADC For Coulomb Counting and Fuel Gauge ApplicationnsitdelhiNo ratings yet
- 2010SOVC A 1V 11fJ-Conversion-Step 10bit 10MS-s A Synchronous SAR ADC in 0.18um CMOSDocument2 pages2010SOVC A 1V 11fJ-Conversion-Step 10bit 10MS-s A Synchronous SAR ADC in 0.18um CMOSDivya SivaNo ratings yet
- IEEE - A 1.8V 1MSps Rail-To-Rail 10-Bit SAR ADC in 0.18um CMOS PDFDocument3 pagesIEEE - A 1.8V 1MSps Rail-To-Rail 10-Bit SAR ADC in 0.18um CMOS PDFQuoc Thang TranNo ratings yet
- Low Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron TechnologyDocument5 pagesLow Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron Technologyeditor_ijtel100% (1)
- A 15-b - Msample/s Digitally Self-Calibrated Pipeline ADC: Hae-Seung Lee, andDocument9 pagesA 15-b - Msample/s Digitally Self-Calibrated Pipeline ADC: Hae-Seung Lee, andSilpa VelagaletiNo ratings yet
- Low-Power CMOS Image Sensor Based On Column-Parallel Single-Slope/SAR Quantization SchemeDocument6 pagesLow-Power CMOS Image Sensor Based On Column-Parallel Single-Slope/SAR Quantization SchemeRaghul RamasamyNo ratings yet
- Lesson Adc PWMDocument36 pagesLesson Adc PWMDavidRubeomNo ratings yet
- A Mosfet-Only Dac For A General Array Configured Device: E. Montane, G. Hornero, G. Chapinal, J. SamitierDocument5 pagesA Mosfet-Only Dac For A General Array Configured Device: E. Montane, G. Hornero, G. Chapinal, J. SamitierMiguel BrunoNo ratings yet
- Opamp Vlsi Project Adc 10 BitDocument4 pagesOpamp Vlsi Project Adc 10 BitPrajwal PrabhuNo ratings yet
- R - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionDocument10 pagesR - KZ I: A 12-Bit ADC Successive-Approximation-Type With Digital Error CorrectionMiguel BrunoNo ratings yet
- Chapter 6Document42 pagesChapter 6Henry MaedaNo ratings yet
- Oregon State OR 9733 I, USA: Jipeng Gil-Cho Ahn, Dong-Young Chang, and Un-Ku MoonDocument4 pagesOregon State OR 9733 I, USA: Jipeng Gil-Cho Ahn, Dong-Young Chang, and Un-Ku MoonAlex WongNo ratings yet
- A 1.2V 10 Bits 100-MS/s Analog-to-Digital Converter With A 8-Stage Pipeline and A 2 Bits Flash ADCDocument4 pagesA 1.2V 10 Bits 100-MS/s Analog-to-Digital Converter With A 8-Stage Pipeline and A 2 Bits Flash ADCKasi BandlaNo ratings yet
- A 10-Bit 500-MSs 55-mW CMOS ADCDocument12 pagesA 10-Bit 500-MSs 55-mW CMOS ADCSoodeh MiraslaniNo ratings yet
- Implementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18Document15 pagesImplementation of A Low-Kickback-Noise Latched Comparator For High-Speed Analog-To-Digital Designs in 0.18TJPRC Publications100% (1)
- Ultra-Low: Power Silicon-on-Sapphire Energy-ScavengingDocument4 pagesUltra-Low: Power Silicon-on-Sapphire Energy-ScavengingGurkaranjot SinghNo ratings yet
- TI Data Converter GuideDocument16 pagesTI Data Converter GuideDavid PostonNo ratings yet
- A Low Power 6-Bit Flash ADC With Reference Voltage and Common-Mode CalibrationDocument6 pagesA Low Power 6-Bit Flash ADC With Reference Voltage and Common-Mode CalibrationSherif M. DabourNo ratings yet
- A 6.1 GS/S 52.8 MW 43 DB DR 80 MHZ Bandwidth 2.4 GHZ RF Bandpass Adc in 40 NM CmosDocument4 pagesA 6.1 GS/S 52.8 MW 43 DB DR 80 MHZ Bandwidth 2.4 GHZ RF Bandpass Adc in 40 NM Cmossohailasghar_tNo ratings yet
- A Low Power A - D Converter 05613669Document4 pagesA Low Power A - D Converter 05613669Romualdo Begale PrudêncioNo ratings yet
- Digital To Analog Converter: Raghu Tumati May 11, 2006Document30 pagesDigital To Analog Converter: Raghu Tumati May 11, 2006সাদ ইবনে মাজNo ratings yet
- Design and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolDocument5 pagesDesign and Simulation of 1-Bit Sigma-Delta ADC Using Ngspice ToolIjarcsee JournalNo ratings yet
- A 12bit 250MSPS Pipeline ADC With 4 Gbps Serial Output InterfaceDocument11 pagesA 12bit 250MSPS Pipeline ADC With 4 Gbps Serial Output InterfaceKasi BandlaNo ratings yet
- Design and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)Document23 pagesDesign and DSP Implementation of 3.3-kW Resonant LLC On-Board Charger (AN005)uzair aminNo ratings yet
- Design of A Pipelined 8b 10MSPS Analog To Digital Converter From System To OTADocument22 pagesDesign of A Pipelined 8b 10MSPS Analog To Digital Converter From System To OTAZarion JacobsNo ratings yet
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocument4 pagesA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamNo ratings yet
- SAR ADC TutorialDocument13 pagesSAR ADC Tutorialvigneshk100% (3)
- Paper Single Slope ADCDocument4 pagesPaper Single Slope ADCArdittoTrianggada100% (1)
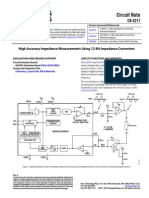
- High Accuracy Impedance Measurements Using 12-Bit Impedance ConvertersDocument6 pagesHigh Accuracy Impedance Measurements Using 12-Bit Impedance Converterschristobal_huntaNo ratings yet
- AS3842Document10 pagesAS3842kik020No ratings yet
- AN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerDocument23 pagesAN005-Design and DSP Implementation of 3.3-kW Resonant LLC On-Board ChargerRudhi KurniawanNo ratings yet
- Sar AdcDocument40 pagesSar AdcNivedini KuttiNo ratings yet
- Design of 12-Bit Adc: End-Term Project, 6.775Document21 pagesDesign of 12-Bit Adc: End-Term Project, 6.775dhineshpNo ratings yet
- VME Smart Analog Monitor (VsamDocument10 pagesVME Smart Analog Monitor (VsamErasmo Franco SNo ratings yet
- Unipolar To Bipolar Analog Voltage ConversionDocument20 pagesUnipolar To Bipolar Analog Voltage ConversionGautam MonipatroNo ratings yet
- Optimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityDocument7 pagesOptimizing The Number of Bits/Stage in 10-Bit, 50Ms/Sec Pipelined A/D Converter Considering Area, Speed, Power and LinearityronaldomponteNo ratings yet
- Chapter 1 IntroductionDocument39 pagesChapter 1 IntroductionNivedini KuttiNo ratings yet
- Applied Sciences: Fully Di Current-Feedback Instrumentation Amplifier With R-2R Dac O Bridge SensorsDocument9 pagesApplied Sciences: Fully Di Current-Feedback Instrumentation Amplifier With R-2R Dac O Bridge Sensorspraba821No ratings yet
- A 2GS/s 9-Bit 8-12x Time-Interleaved Pipeline-SAR ADC For A PMCW Radar in 28nm CMOSDocument4 pagesA 2GS/s 9-Bit 8-12x Time-Interleaved Pipeline-SAR ADC For A PMCW Radar in 28nm CMOSburakgonenNo ratings yet
- Understanding Pipelined ADCs PDFDocument5 pagesUnderstanding Pipelined ADCs PDF154987No ratings yet
- A Phase-Locked Loop With Embedded Analog-to-Digital Converter For Digital ControlDocument7 pagesA Phase-Locked Loop With Embedded Analog-to-Digital Converter For Digital ControlAbhi BhatNo ratings yet
- THLDL: Wright2Document2 pagesTHLDL: Wright2Dennis AtyugrasiwiNo ratings yet
- Analog To Digital Converter in Wireless Local Area NetworkDocument29 pagesAnalog To Digital Converter in Wireless Local Area Networkkumarbsnsp0% (1)
- Dual Slope ADC DesignDocument10 pagesDual Slope ADC DesignMoHaMMeD HaLaByNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Tpic 6595Document16 pagesTpic 6595RKNo ratings yet
- 4-Channel, 4.8 KHZ, Ultralow Noise, 24-Bit Sigma-Delta Adc With PgaDocument56 pages4-Channel, 4.8 KHZ, Ultralow Noise, 24-Bit Sigma-Delta Adc With PgaIoan TivgaNo ratings yet
- Logic Families and Their Characteristics CharacteristicsDocument26 pagesLogic Families and Their Characteristics CharacteristicsanunilaNo ratings yet
- PCA9511A: 1. General DescriptionDocument24 pagesPCA9511A: 1. General DescriptionGuilherme Ribeiro BarbosaNo ratings yet
- Analyze and design MOSFET amplifier configurationsDocument8 pagesAnalyze and design MOSFET amplifier configurationsPraveen KumarNo ratings yet
- PiddocsDocument50 pagesPiddocsscribsunilNo ratings yet
- Experiment NO 1:: AIM: To Study Sampling and Reconstruction of Analog SignalDocument12 pagesExperiment NO 1:: AIM: To Study Sampling and Reconstruction of Analog Signalumesh_maiet0% (1)
- Features: LT1010 Fast 150ma Power BufferDocument16 pagesFeatures: LT1010 Fast 150ma Power BufferArie DinataNo ratings yet
- Aic23 DatasheetDocument44 pagesAic23 DatasheetBalacescu ClaudiuNo ratings yet
- OP8681Document17 pagesOP8681Prashant TiwariNo ratings yet
- SN 74 HC 240Document18 pagesSN 74 HC 240prdp_666No ratings yet
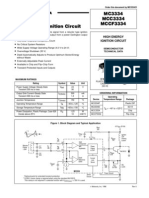
- Datasheet MC3334Document6 pagesDatasheet MC3334odipasNo ratings yet
- Plug-In Hybrid Electric Vehicle Charger System: Senior Project Final ReportDocument38 pagesPlug-In Hybrid Electric Vehicle Charger System: Senior Project Final ReportKidus DawitNo ratings yet
- Voltage Regulator TLE 4294: Target Data SheetDocument10 pagesVoltage Regulator TLE 4294: Target Data SheetOsvaldo MauceriNo ratings yet
- Ta8710s-Sif Converter For TV and Vtr-ToshibaDocument7 pagesTa8710s-Sif Converter For TV and Vtr-Toshibanightreader99No ratings yet
- A Peak Hold Energy Readout Circuit For Use With Pyroelectric Laser Energy MonitorsDocument3 pagesA Peak Hold Energy Readout Circuit For Use With Pyroelectric Laser Energy Monitorspasargad135106No ratings yet
- ANALOG DEVICES' PARTS INDEXDocument46 pagesANALOG DEVICES' PARTS INDEXGrimmjow JaegerjaquezNo ratings yet
- G-Lab GSC2 ManualDocument20 pagesG-Lab GSC2 ManualdemonclaenerNo ratings yet
- Service Manual: Subwoofer Amplifier Model: RW-12Document14 pagesService Manual: Subwoofer Amplifier Model: RW-12vintagekikiNo ratings yet
- ECG-11B Service ManualDocument18 pagesECG-11B Service Manualingalbertotre100% (1)
- Chap1 - The Operational AmplifierDocument40 pagesChap1 - The Operational AmplifierzalikaseksNo ratings yet
- Diodes Inc by Element14 Batch 1Document5 pagesDiodes Inc by Element14 Batch 15hqyidNo ratings yet
- Amplifier PDFDocument46 pagesAmplifier PDFvladareanucatalindanNo ratings yet
- Moog Controllers MotionControllers Catalog enDocument68 pagesMoog Controllers MotionControllers Catalog enKamillAL-akhras100% (1)
- Active Capacitor Multiplier PDFDocument7 pagesActive Capacitor Multiplier PDFTridentBhattNo ratings yet
- Amplitude Modulation Transmission: Group 1Document41 pagesAmplitude Modulation Transmission: Group 1Vilma R. CalatravaNo ratings yet
- 30-50 GHz Cherry Hooper BJT amplifier designDocument2 pages30-50 GHz Cherry Hooper BJT amplifier designBrian WilliamsonNo ratings yet
- Sitras Pro enDocument8 pagesSitras Pro enરામ પ્રતાપNo ratings yet
- Answer KeyDocument9 pagesAnswer Keygebretsadkan abrha100% (1)