You might also like
- Microblaze Based Multi-Processor Implementation of Regrouping Particle Swarm Optimization AlgorithmDocument7 pagesMicroblaze Based Multi-Processor Implementation of Regrouping Particle Swarm Optimization AlgorithmJoelNo ratings yet
- Multi-Swarm Parallel PSODocument7 pagesMulti-Swarm Parallel PSOChaitanya KanchibhotlaNo ratings yet
- A Parallel Particle Swarm OptimizerDocument7 pagesA Parallel Particle Swarm OptimizerMichael ClarkNo ratings yet
- Particle Swarm Optimization in The Fine-Tuning of Fuzzy Software Cost Estimation ModelsDocument12 pagesParticle Swarm Optimization in The Fine-Tuning of Fuzzy Software Cost Estimation ModelsnguyendattdhNo ratings yet
- Multi-Sensor Data Processing For Air Traffic Control System: February 2013Document6 pagesMulti-Sensor Data Processing For Air Traffic Control System: February 2013Felix GarciasNo ratings yet
- Generalized Swarm Intelligence Algorithms With Domain-Specific HeuristicsDocument9 pagesGeneralized Swarm Intelligence Algorithms With Domain-Specific HeuristicsIAES IJAINo ratings yet
- Evolutionary Algorithms in Kinematic Design of Robotic SystemsDocument7 pagesEvolutionary Algorithms in Kinematic Design of Robotic SystemsMohsen PeykaranNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document7 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- Ece Thesis SampleDocument8 pagesEce Thesis Samplealiciabrooksbeaumont100% (2)
- Adriatic Paper FPL-2004Document5 pagesAdriatic Paper FPL-2004prathap13No ratings yet
- GMS 4Document8 pagesGMS 4rendezvous2k23No ratings yet
- GFHFGJDocument8 pagesGFHFGJAlakananda ChoudhuryNo ratings yet
- Research Article: Optimization of Integer Order Integrators For Deriving Improved Models of Their Fractional CounterpartsDocument12 pagesResearch Article: Optimization of Integer Order Integrators For Deriving Improved Models of Their Fractional CounterpartsvamshiNo ratings yet
- Particle Swarm Optimization of Neural Network Architectures and WeightsDocument4 pagesParticle Swarm Optimization of Neural Network Architectures and WeightsgalaxystarNo ratings yet
- A Novel Face Recognition Algorithm For Distinguishing Faces With Various AnglesDocument5 pagesA Novel Face Recognition Algorithm For Distinguishing Faces With Various Anglestjvg1991No ratings yet
- A PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorDocument5 pagesA PSO-Based Optimum Design of PID Controller For A Linear Brushless DC MotorMd Mustafa KamalNo ratings yet
- Hindawi Pso PDFDocument14 pagesHindawi Pso PDFHouda BOUCHAREBNo ratings yet
- An Ecient Multiple Shooting Based Reduced SQP Strategy For Large-Scale Dynamic Process OptimizationDocument10 pagesAn Ecient Multiple Shooting Based Reduced SQP Strategy For Large-Scale Dynamic Process OptimizationaminNo ratings yet
- ICMIEE 2020 Performance AtlasesDocument6 pagesICMIEE 2020 Performance Atlaseselias muñozNo ratings yet
- Power Quality Improvement of Distribution System by Optimal Location and Size of Dgs Using Particle Swarm OptimizationDocument7 pagesPower Quality Improvement of Distribution System by Optimal Location and Size of Dgs Using Particle Swarm OptimizationfusionmasterNo ratings yet
- Research MethodologyDocument13 pagesResearch Methodologyamitcrathod4193No ratings yet
- Research Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile RobotDocument12 pagesResearch Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile Robotmarcio pivelloNo ratings yet
- 46 PDFDocument8 pages46 PDFGeneral ZodNo ratings yet
- A CUDA Implementation of The Standard Particle Swarm OptimizationDocument8 pagesA CUDA Implementation of The Standard Particle Swarm OptimizationNeha SharmaNo ratings yet
- AJK IRK TKProbabilityCollectivesforSolvingTrussStructureProblems 1Document16 pagesAJK IRK TKProbabilityCollectivesforSolvingTrussStructureProblems 1lutfia hajNo ratings yet
- Halide RLDocument12 pagesHalide RLMasci MerouaniNo ratings yet
- Multidisciplinary Design Optimization Method ApplDocument9 pagesMultidisciplinary Design Optimization Method Appljoojoo987654321No ratings yet
- To Put SlideDocument5 pagesTo Put SlidevivekNo ratings yet
- First Springer PaperDocument19 pagesFirst Springer PaperMauricio Moyano CastilloNo ratings yet
- Pss Dig SilentDocument9 pagesPss Dig SilentProject MentorNo ratings yet
- Nelson L. Passos Robert P. Light Virgil Andronache Edwin H.-M. Sha Midwestern State UniversityDocument6 pagesNelson L. Passos Robert P. Light Virgil Andronache Edwin H.-M. Sha Midwestern State UniversityAkhil KsNo ratings yet
- Transactions of The VŠB - Technical University of Ostrava: 10.1515/tvsb-2015-0015Document10 pagesTransactions of The VŠB - Technical University of Ostrava: 10.1515/tvsb-2015-0015KassemDeebNo ratings yet
- 120-Phang Seng BoonDocument13 pages120-Phang Seng BoonDedi SetyawanNo ratings yet
- Particle Swarm Optimization (PSO) Algorithm: Parameters Effect and AnalysisDocument9 pagesParticle Swarm Optimization (PSO) Algorithm: Parameters Effect and AnalysisShosho ElgharablyNo ratings yet
- Association Rule Mining Using Self Adaptive Particle Swarm OptimizationDocument5 pagesAssociation Rule Mining Using Self Adaptive Particle Swarm OptimizationAnonymous TxPyX8cNo ratings yet
- Orlando Newmark Bogday 05Document15 pagesOrlando Newmark Bogday 05Alex AraújoNo ratings yet
- Linear System Order Reduction Model Using Stability Equation Method and Factor Division Algorithm For MIMO SystemsDocument10 pagesLinear System Order Reduction Model Using Stability Equation Method and Factor Division Algorithm For MIMO SystemsIJRASETPublicationsNo ratings yet
- Multidisciplinary Aerospace Design Survey of Recent DevelopmentsDocument10 pagesMultidisciplinary Aerospace Design Survey of Recent DevelopmentsSaravanan RNo ratings yet
- Interactive Deformation and Visualization of Level Set Surfaces Using Graphics HardwareDocument18 pagesInteractive Deformation and Visualization of Level Set Surfaces Using Graphics Hardwaremilito411No ratings yet
- Applied Soft ComputingDocument5 pagesApplied Soft ComputingGowthamUcekNo ratings yet
- Boosting Auxiliary Task Guidance: A Probabilistic ApproachDocument10 pagesBoosting Auxiliary Task Guidance: A Probabilistic ApproachIAES IJAINo ratings yet
- Hpso: A New Version of Particle Swarm Optimization Algorithm Journal of Artificial IntelligenceDocument13 pagesHpso: A New Version of Particle Swarm Optimization Algorithm Journal of Artificial IntelligencesgurwindersNo ratings yet
- A Review of Particle Swarm Optimization Feature Selection Classification and HybridizationsDocument5 pagesA Review of Particle Swarm Optimization Feature Selection Classification and HybridizationsEditor IJRITCCNo ratings yet
- Efficient Clustering of Dataset Based On Particle Swarm OptimizationDocument10 pagesEfficient Clustering of Dataset Based On Particle Swarm OptimizationTJPRC PublicationsNo ratings yet
- Tackling Component Interoperability in Quantum Chemistry SoftwareDocument10 pagesTackling Component Interoperability in Quantum Chemistry SoftwareElectro_LiteNo ratings yet
- Residue To Binary Converter For A Four Moduli SetDocument12 pagesResidue To Binary Converter For A Four Moduli SetIJRASETPublicationsNo ratings yet
- T-SMAD: A Concurrent Design Tool For Space Mission Analysis and DesignDocument6 pagesT-SMAD: A Concurrent Design Tool For Space Mission Analysis and DesignmegustalazorraNo ratings yet
- Erik Schnetter Et Al - Astrophysical Applications of Numerical Relativity - From Teragrid To PetascaleDocument8 pagesErik Schnetter Et Al - Astrophysical Applications of Numerical Relativity - From Teragrid To PetascaleHimaszNo ratings yet
- Optimal Placement of Measuring Devices For DistribDocument14 pagesOptimal Placement of Measuring Devices For Distribepe3630No ratings yet
- Adaptive Particle Swarm Optimization On Individual LevelDocument4 pagesAdaptive Particle Swarm Optimization On Individual LevelABDULRAHIMAN RAJEKHANNo ratings yet
- IJETA-V4I2P13 O. Deepa Dr. J. Suguna PDFDocument6 pagesIJETA-V4I2P13 O. Deepa Dr. J. Suguna PDFAmulya AnuragNo ratings yet
- K-Node Set Reliability Optimization of A Distributed Computing System Using Particle Swarm AlgorithmDocument10 pagesK-Node Set Reliability Optimization of A Distributed Computing System Using Particle Swarm AlgorithmOyeniyi Samuel KehindeNo ratings yet
- Network Adjustment Program Using MATLAB: January 2011Document17 pagesNetwork Adjustment Program Using MATLAB: January 2011andenetNo ratings yet
- Application Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessDocument10 pagesApplication Methods For Genetic Algorithms For The Search of Feed Positions in The Design of A Reactive Distillation ProcessAdam BuchananNo ratings yet
- Applied Sciences: Using Improved Brainstorm Optimization Algorithm For Hardware/Software PartitioningDocument17 pagesApplied Sciences: Using Improved Brainstorm Optimization Algorithm For Hardware/Software PartitioningValentin MotocNo ratings yet
- International Journal of Electronics and Communications (AEÜ)Document9 pagesInternational Journal of Electronics and Communications (AEÜ)mohsenparsauniNo ratings yet
- Autonomous Reinforcement Learning-BioloidDocument7 pagesAutonomous Reinforcement Learning-Bioloiddarkot1234No ratings yet
- Mi 150105Document8 pagesMi 150105古鹏飞No ratings yet
- Setting Up PID DC Motor Speed Control Alteration Parameters Using Particle Swarm Optimization StrategyDocument14 pagesSetting Up PID DC Motor Speed Control Alteration Parameters Using Particle Swarm Optimization StrategyApri KurniawanNo ratings yet
- Fpga Based An Advanced Lut Methodology For Design of A Digital FilterDocument5 pagesFpga Based An Advanced Lut Methodology For Design of A Digital FilterIjesat JournalNo ratings yet
- Optimal Power Calculation For The Cryptography Aes Algorithm Using Clock Gating TechniqueDocument5 pagesOptimal Power Calculation For The Cryptography Aes Algorithm Using Clock Gating TechniqueIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 26Document4 pagesIjesat 2012 02 Si 01 26Ijesat JournalNo ratings yet
- Impact Aggregation of Ethernet Frames For Higher ThroughputDocument6 pagesImpact Aggregation of Ethernet Frames For Higher ThroughputIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 24Document5 pagesIjesat 2012 02 Si 01 24Ijesat JournalNo ratings yet
- Ieb: Integrated Testing Environment On Loop Boundaries: R. Nagendra Babu, B.Chaitanya Krishna, Ch. V.Phani KrishnaDocument5 pagesIeb: Integrated Testing Environment On Loop Boundaries: R. Nagendra Babu, B.Chaitanya Krishna, Ch. V.Phani KrishnaIjesat JournalNo ratings yet
- A Survey On Web Page Segmentation and Its Applications: U.Arundhathi, V.Sneha Latha, D.Grace PriscillaDocument6 pagesA Survey On Web Page Segmentation and Its Applications: U.Arundhathi, V.Sneha Latha, D.Grace PriscillaIjesat JournalNo ratings yet
- An Approach For Privacy Preservation Using XML Distance MeasureDocument5 pagesAn Approach For Privacy Preservation Using XML Distance MeasureIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 16Document7 pagesIjesat 2012 02 Si 01 16Ijesat JournalNo ratings yet
- Zigbee Based Wireless Home Automation System With Voice RecognitionDocument6 pagesZigbee Based Wireless Home Automation System With Voice RecognitionIjesat JournalNo ratings yet
- An Efficient Face Recognition System by Declining Rejection Rate Using PcaDocument6 pagesAn Efficient Face Recognition System by Declining Rejection Rate Using PcaIjesat JournalNo ratings yet
- Software Quality Assurance in Extreme ProgrammingDocument5 pagesSoftware Quality Assurance in Extreme ProgrammingIjesat JournalNo ratings yet
- An Efficient Mechanism For Intrusion Detection and Prevention SystemDocument5 pagesAn Efficient Mechanism For Intrusion Detection and Prevention SystemIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 07Document4 pagesIjesat 2012 02 Si 01 07Ijesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 12Document5 pagesIjesat 2012 02 Si 01 12Ijesat JournalNo ratings yet
- Mining Items From Large Database Using Coherent RulesDocument10 pagesMining Items From Large Database Using Coherent RulesIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 11Document4 pagesIjesat 2012 02 Si 01 11Ijesat JournalNo ratings yet
- Zigbee Sensor Network For Multichannel Advanced Metering InfrastructureDocument4 pagesZigbee Sensor Network For Multichannel Advanced Metering InfrastructureIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 10Document7 pagesIjesat 2012 02 Si 01 10Ijesat JournalNo ratings yet
- A Modified Energy Conserving Switch Architechure For Lan'S: R.S.Sindhutheja, T.V.Vamsikrishna, CH - Ravisankar3, S.JhansiDocument4 pagesA Modified Energy Conserving Switch Architechure For Lan'S: R.S.Sindhutheja, T.V.Vamsikrishna, CH - Ravisankar3, S.JhansiIjesat JournalNo ratings yet
- A Novel Method To Test The Strength of Electrical Equipment Through Impulse Generator and Design of Its Circuit ComponentsDocument5 pagesA Novel Method To Test The Strength of Electrical Equipment Through Impulse Generator and Design of Its Circuit ComponentsIjesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 05Document7 pagesIjesat 2012 02 Si 01 05Ijesat JournalNo ratings yet
- Replacing Passport Using Bio-Chip: Rajesh Babu Natha, Seema Kalangi, Swathi NallapatiDocument6 pagesReplacing Passport Using Bio-Chip: Rajesh Babu Natha, Seema Kalangi, Swathi NallapatiIjesat JournalNo ratings yet
- Ijesat 2012 02 01 14Document7 pagesIjesat 2012 02 01 14Ijesat JournalNo ratings yet
- Ijesat 2012 02 Si 01 02Document4 pagesIjesat 2012 02 Si 01 02Ijesat JournalNo ratings yet
- Retail Technology: A Competitive Tool For Customer Service: S.Ramesh Babu, P.Ramesh Babu, Dr.M.S.NarayanaDocument7 pagesRetail Technology: A Competitive Tool For Customer Service: S.Ramesh Babu, P.Ramesh Babu, Dr.M.S.NarayanaIjesat JournalNo ratings yet
- Automatic Privacy Query Updation For Moving Objects: M. MadhaviDocument7 pagesAutomatic Privacy Query Updation For Moving Objects: M. MadhaviIjesat JournalNo ratings yet
- Ijesat 2012 02 01 13Document6 pagesIjesat 2012 02 01 13Ijesat JournalNo ratings yet
- Effect of Injection Orientation On Fuel Concentration in A Diesel Engine: Through CFD SimulationDocument4 pagesEffect of Injection Orientation On Fuel Concentration in A Diesel Engine: Through CFD SimulationIjesat JournalNo ratings yet
- A Body Sensor Network Data Repository With A Different Mining TechniqueDocument5 pagesA Body Sensor Network Data Repository With A Different Mining TechniqueIjesat JournalNo ratings yet
- Ug1137 Zynq Ultrascale Mpsoc SwdevDocument644 pagesUg1137 Zynq Ultrascale Mpsoc Swdevamit sanghaiNo ratings yet
- SOC Architecture and Design: - System-On-Chip (SOC) - SOC Covers Many TopicsDocument32 pagesSOC Architecture and Design: - System-On-Chip (SOC) - SOC Covers Many TopicschaitanyaNo ratings yet
- Installing CpuDocument19 pagesInstalling CpuABELLO A. BADAYOSNo ratings yet
- A. Internet of Things: 1. Smart Self Driving Car "Waymo"Document35 pagesA. Internet of Things: 1. Smart Self Driving Car "Waymo"Jo Traven AzueloNo ratings yet
- Single Time Phase Contingency AnalysisDocument34 pagesSingle Time Phase Contingency AnalysisЭдвин Хавьер Гуэрра УнтойяNo ratings yet
- Unit 1: Introduction To Embedded SystemsDocument49 pagesUnit 1: Introduction To Embedded SystemsJoel100% (1)
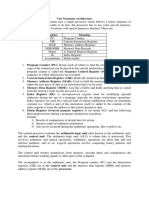
- Von Neumann ArchitectureDocument8 pagesVon Neumann ArchitectureDinesh KumarNo ratings yet
- ITGS ProjectDocument90 pagesITGS ProjectTarek A. OrmNo ratings yet
- GPU IntroductionDocument52 pagesGPU Introductionspark1122No ratings yet
- How To Build and Upgrade Your PC (2012) PDFDocument20 pagesHow To Build and Upgrade Your PC (2012) PDFvengadamNo ratings yet
- UML Modeling and Performance Evaluation of Multithreaded Programs On Dual Core ProcessorDocument10 pagesUML Modeling and Performance Evaluation of Multithreaded Programs On Dual Core ProcessorseravanakumarNo ratings yet
- 5.operating System - ThreadsDocument18 pages5.operating System - ThreadsShashank RahNo ratings yet
- 86串口屏数据手册V2.1.Zh CN.enDocument93 pages86串口屏数据手册V2.1.Zh CN.endlink377No ratings yet
- Splunk 5.0 InstallationDocument102 pagesSplunk 5.0 InstallationArunkumar KumaresanNo ratings yet
- KVRRao Resume Revised NGIT PDFDocument6 pagesKVRRao Resume Revised NGIT PDFDr. KVR RaoNo ratings yet
- VLSI Circuits For Emerging ApplicationsDocument486 pagesVLSI Circuits For Emerging ApplicationsPepe FC50% (2)
- 301 DAC IntroductionDocument105 pages301 DAC IntroductionSuraj Raj TripathyNo ratings yet
- Oracle® VM Virtualbox Installation Instructions For Windows 10 and Linux Virtual Machine Creation Targeting Avnet Development BoardsDocument61 pagesOracle® VM Virtualbox Installation Instructions For Windows 10 and Linux Virtual Machine Creation Targeting Avnet Development BoardsSouvik DasNo ratings yet
- Week 5Document16 pagesWeek 5Rabindra PoudelNo ratings yet
- UNIT 1-21CSC202J - Operating SystemDocument110 pagesUNIT 1-21CSC202J - Operating SystemveeramatNo ratings yet
- Computer Power User - June 2012Document112 pagesComputer Power User - June 2012experioNo ratings yet
- A System Is A Collection of Elements or Components That Are Organized For A Common PurposeDocument55 pagesA System Is A Collection of Elements or Components That Are Organized For A Common PurposeFaisal ShahNo ratings yet
- Kirin 710F Vs Kirin 710Document4 pagesKirin 710F Vs Kirin 710Vladimir VasiljevskiNo ratings yet
- VSICM7 M08 Resource Manage MonitorDocument78 pagesVSICM7 M08 Resource Manage Monitorhacker_05No ratings yet
- Rallison Cable Derating HandbookDocument13 pagesRallison Cable Derating Handbookkb_pramodNo ratings yet
- Hybrid Dataflow Von-Neumann ArchitecturesDocument21 pagesHybrid Dataflow Von-Neumann ArchitecturesCarlos RibeiroNo ratings yet
- Nucleo Pro 3 User GuideDocument92 pagesNucleo Pro 3 User GuideCasey GoodeNo ratings yet
- 322683Document23 pages322683pawan_2019No ratings yet
- CPU List - Processor BenchmarkDocument38 pagesCPU List - Processor BenchmarkspreewellNo ratings yet
- Operating Systems Chapter (1) Review Questions: Memory or Primary MemoryDocument8 pagesOperating Systems Chapter (1) Review Questions: Memory or Primary MemoryNataly AdelNo ratings yet