You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Piston RingDocument43 pagesPiston RingSudath Kularathna67% (3)
- Expanded Silicone Rubber Sponge - Grades SIL10, SIL16, SIL24 & SIL33Document3 pagesExpanded Silicone Rubber Sponge - Grades SIL10, SIL16, SIL24 & SIL33ari wiliamNo ratings yet
- Acasestudyon Process Condensate Stripperin Ammonia PlantDocument8 pagesAcasestudyon Process Condensate Stripperin Ammonia Plantdeepak ojhaNo ratings yet
- Aci 318-14 RC-BM-001Document7 pagesAci 318-14 RC-BM-001Bunkun15No ratings yet
- X20 CR Mo 13 KGDocument2 pagesX20 CR Mo 13 KGBonthala BadriNo ratings yet
- Gyproc Plasters: Product CatalogueDocument24 pagesGyproc Plasters: Product CatalogueFariz AbdullaNo ratings yet
- GKSDocument8 pagesGKSDota NgNo ratings yet
- Mechanics of Materials Beer 7th Edition Solutions ManualDocument5 pagesMechanics of Materials Beer 7th Edition Solutions Manualjosephpetersonjaczgqxdsw100% (45)
- 06 - Fire Resistant CablesDocument13 pages06 - Fire Resistant CablesmlutfimaNo ratings yet
- Heat Transfer Equations and Critical Insulation RadiusDocument18 pagesHeat Transfer Equations and Critical Insulation RadiusPon ShanmugakumarNo ratings yet
- Geotehnics of SoftsoilDocument44 pagesGeotehnics of SoftsoilVinna RinayaniNo ratings yet
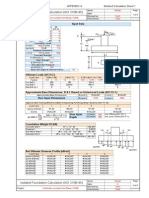
- Isolated Foundation Calculation (ACI 318M-95) : Input DataDocument5 pagesIsolated Foundation Calculation (ACI 318M-95) : Input DataJuan CarlosNo ratings yet
- Haematoxylin (Ehrlich) : Intended UseDocument3 pagesHaematoxylin (Ehrlich) : Intended Useyohanes e. gunawanNo ratings yet
- Chapter 14 Electric Current and Its Effects Class 7 Extra Questions ScienceDocument6 pagesChapter 14 Electric Current and Its Effects Class 7 Extra Questions ScienceShaurya Maniktala50% (2)
- GTU BE Semester V Mass Transfer Operations I Exam Summer 2016Document2 pagesGTU BE Semester V Mass Transfer Operations I Exam Summer 2016Shivam PanchalNo ratings yet
- Adsorption of Surfactants On Sand SurfacDocument13 pagesAdsorption of Surfactants On Sand SurfacBihag Shukla100% (1)
- Lec 3Document14 pagesLec 3anuda09No ratings yet
- The University of The South Pacific: Chemistry DivisionDocument10 pagesThe University of The South Pacific: Chemistry DivisionTetzNo ratings yet
- MEB Nptel Week 5 Assignment AnswersDocument4 pagesMEB Nptel Week 5 Assignment AnswersMeethiPotterNo ratings yet
- J Est 2018 11 027Document14 pagesJ Est 2018 11 027Hiraya HaeldrichNo ratings yet
- HoltacDocument8 pagesHoltacdargil66No ratings yet
- Materials for shoes, optical lenses and water bottlesDocument3 pagesMaterials for shoes, optical lenses and water bottlesJpricarioNo ratings yet
- Contractor GuidelinesDocument3 pagesContractor GuidelinesRichardson VelascoNo ratings yet
- BECHEM Special Lubricants For Open Gear Drives 2015 01Document11 pagesBECHEM Special Lubricants For Open Gear Drives 2015 01satfas100% (1)
- WS1000-EN Table of ContentsDocument3 pagesWS1000-EN Table of ContentsNeesonNo ratings yet
- Master Emaco P210Document2 pagesMaster Emaco P210Gavriel NgNo ratings yet
- Characterization of Minerals, Metals and MaterialsDocument723 pagesCharacterization of Minerals, Metals and Materialslfvorster99No ratings yet
- Ds Oil and Grease TypesDocument2 pagesDs Oil and Grease TypesIsaias BarbaNo ratings yet
- Specification For Alloy-Steel and Stainless Steel Bolting Materials For High-Temperature ServiceDocument18 pagesSpecification For Alloy-Steel and Stainless Steel Bolting Materials For High-Temperature ServicesergioprybyszNo ratings yet
- In-Situ Rock StressesDocument16 pagesIn-Situ Rock StressesAslam KhanNo ratings yet