You might also like
- MAX1617ADocument18 pagesMAX1617AEdson HenriqueNo ratings yet
- Maxim Temp Sensor1Document18 pagesMaxim Temp Sensor1Samir BenidirNo ratings yet
- Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDocument20 pagesExtremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesMilan Đokić100% (1)
- DS3231Document25 pagesDS3231Muhammad Ajie PrastyoNo ratings yet
- Max 1618Document18 pagesMax 1618Edson HenriqueNo ratings yet
- LM 82 BDocument24 pagesLM 82 BKemahyanto Exaudi SiahaanNo ratings yet
- Fan Control AUTOMATIC Fan Control AbstractDocument19 pagesFan Control AUTOMATIC Fan Control AbstractkalpeshbrNo ratings yet
- Dual-Band LNA/Mixer ICs Deliver Ultra-High LinearityDocument28 pagesDual-Band LNA/Mixer ICs Deliver Ultra-High LinearityqwertyuiNo ratings yet
- Miniature, Low-Voltage, Precision Step-Down Controller: General Description - FeaturesDocument20 pagesMiniature, Low-Voltage, Precision Step-Down Controller: General Description - Featurescatsoithahuong84No ratings yet
- Tiny Serial Digital Thermal Sensor: Features General DescriptionDocument16 pagesTiny Serial Digital Thermal Sensor: Features General DescriptionKrychaNo ratings yet
- Max127 Max128bDocument16 pagesMax127 Max128bwhynot05No ratings yet
- Max 3237Document16 pagesMax 32372065001779207No ratings yet
- Max712 Max713 PDFDocument17 pagesMax712 Max713 PDFAnthony GonzalesNo ratings yet
- Ad 7524Document8 pagesAd 7524Giovanny ContrerasNo ratings yet
- Adjustable, High-Linearity, Sige Dual-Band Lna/Mixer Ics: General Description FeaturesDocument36 pagesAdjustable, High-Linearity, Sige Dual-Band Lna/Mixer Ics: General Description FeaturesNguyễn DươngNo ratings yet
- MCP3901Document62 pagesMCP3901oxobfeNo ratings yet
- MAX32xx, Serial To TTLDocument17 pagesMAX32xx, Serial To TTLDecker JamesNo ratings yet
- LM75Document12 pagesLM75tebeica2100% (2)
- Adc 0804 PDFDocument18 pagesAdc 0804 PDFCinthya VillenaNo ratings yet
- Low-Power, 12-Bit Voltage-Output Dacs With Serial InterfaceDocument16 pagesLow-Power, 12-Bit Voltage-Output Dacs With Serial InterfaceMarcelo FerreiraNo ratings yet
- Max3222 Max3241Document17 pagesMax3222 Max3241Sandip GoyaniNo ratings yet
- CLC5526 Digital Variable Gain Amplifier (DVGA) : General DescriptionDocument10 pagesCLC5526 Digital Variable Gain Amplifier (DVGA) : General DescriptionVănThịnhNo ratings yet
- Max712 Max713Document17 pagesMax712 Max713พี่จิน ยศเนืองนิตย์No ratings yet
- 1.25, Dual SPST, CMOS Analog Switches: General Description FeaturesDocument12 pages1.25, Dual SPST, CMOS Analog Switches: General Description FeaturesStefan GlaserNo ratings yet
- Description Features: Ltc2942 Battery Gas Gauge With Temperature, Voltage MeasurementDocument18 pagesDescription Features: Ltc2942 Battery Gas Gauge With Temperature, Voltage Measurementhex0x1No ratings yet
- Features Description: 12-Bit, Multiplying D/A ConverterDocument9 pagesFeatures Description: 12-Bit, Multiplying D/A Convertershobhitmittal7No ratings yet
- ADC0808M: Total Unadjusted Error - . - 0.75 LSB Max Resolution of 8 Bits 100-s Conversion TimeDocument8 pagesADC0808M: Total Unadjusted Error - . - 0.75 LSB Max Resolution of 8 Bits 100-s Conversion TimeSushant MishraNo ratings yet
- Max3160 Max3162Document23 pagesMax3160 Max3162jb2015831No ratings yet
- LTC4151 I2C Current and Voltage MonitorDocument18 pagesLTC4151 I2C Current and Voltage MonitorNegru P. PlantatieNo ratings yet
- 24LC02BDocument26 pages24LC02Bjab_arx1No ratings yet
- I C, 32-Bit, Binary Counter Clock With 64-Bit ID: General Description FeaturesDocument12 pagesI C, 32-Bit, Binary Counter Clock With 64-Bit ID: General Description FeaturesNur AzizahNo ratings yet
- Ad 421Document14 pagesAd 421Vishal Devrao JadhavNo ratings yet
- LCD Inverter Sumida NotebookDocument16 pagesLCD Inverter Sumida NotebookIlie DragutaNo ratings yet
- Low-Voltage 3.5, SPDT, CMOS Analog Switches: General Description FeaturesDocument9 pagesLow-Voltage 3.5, SPDT, CMOS Analog Switches: General Description FeaturesYoussef EssaouariNo ratings yet
- CMOS Static RAM 256K (32K X 8-Bit) IDT71256S IDT71256L: Features DescriptionDocument10 pagesCMOS Static RAM 256K (32K X 8-Bit) IDT71256S IDT71256L: Features DescriptionantoninoxxxNo ratings yet
- Max 8729Document26 pagesMax 8729lagreta55No ratings yet
- Max 5541Document9 pagesMax 5541rohitkiranbrNo ratings yet
- MS5611 01ba03Document20 pagesMS5611 01ba03renoNo ratings yet
- Hall SenzorDocument15 pagesHall SenzorfelixmosNo ratings yet
- 93C56LIDocument9 pages93C56LIJeswanth KumarNo ratings yet
- 2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWDocument8 pages2.488Gbps SFP Optical Transceiver, 300m Reach: DS-SFP-FC-2G-SWtv_romeoNo ratings yet
- DS1307 64 X 8, Serial, I C Real-Time Clock: General Description FeaturesDocument14 pagesDS1307 64 X 8, Serial, I C Real-Time Clock: General Description FeaturesAn TrìnhNo ratings yet
- 5th-Order, Lowpass, Switched-Capacitor Filters: General Description FeaturesDocument12 pages5th-Order, Lowpass, Switched-Capacitor Filters: General Description FeaturesGustavo PalaciosNo ratings yet
- MCP9800 Digital Temperature SensorDocument42 pagesMCP9800 Digital Temperature SensorNeeraj AdsulNo ratings yet
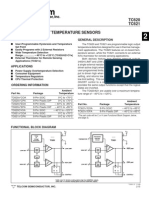
- TC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General DescriptionDocument6 pagesTC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General Descriptionmiki983No ratings yet
- 2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWDocument8 pages2.488Gbps SFP Optical Transceiver, 2km Reach: DS-SFP-FC-2G-LWtv_romeoNo ratings yet
- Mcp6291/1R/2/3/4/5: 1.0 Ma, 10 MHZ Rail-To-Rail Op AmpDocument36 pagesMcp6291/1R/2/3/4/5: 1.0 Ma, 10 MHZ Rail-To-Rail Op AmpJuan RegaladoNo ratings yet
- Max 31865Document26 pagesMax 31865Chairil Anwar100% (1)
- Max 31865Document26 pagesMax 31865Renato CostaNo ratings yet
- MCP 3909Document44 pagesMCP 3909José HeinNo ratings yet
- Max187 Max189Document20 pagesMax187 Max189radioscribdNo ratings yet
- Multi-Output, Low-Noise Power-Supply Controllers For Notebook ComputersDocument28 pagesMulti-Output, Low-Noise Power-Supply Controllers For Notebook ComputersAleksNo ratings yet
- Dual Quick-PWM Step-Down Controller With Low-Power LDO and RTC Regulator For MAIN SuppliesDocument24 pagesDual Quick-PWM Step-Down Controller With Low-Power LDO and RTC Regulator For MAIN SuppliesReklama BielskoNo ratings yet
- Max 31865 DatasheetDocument25 pagesMax 31865 Datasheetalexender2kNo ratings yet
- MAX106Document31 pagesMAX106Deep SahaniNo ratings yet
- MAX333ACWPDocument8 pagesMAX333ACWPLuis Enrique De los Santos FarfánNo ratings yet
- 512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionDocument15 pages512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionNduwti NestaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- IR-X310 Operators Manual - 2004Document30 pagesIR-X310 Operators Manual - 2004Ashok LuleNo ratings yet
- An039 AlterajtagDocument44 pagesAn039 AlterajtagPrasad Kumar VetchaNo ratings yet
- Altera Epm7032qc44 15Document66 pagesAltera Epm7032qc44 15Ashok LuleNo ratings yet
- 1Document12 pages1Ashok LuleNo ratings yet
- Reactive Power CompensationDocument12 pagesReactive Power CompensationSyed Muhammad Munavvar Hussain100% (5)
- Ee102 Lab 5Document8 pagesEe102 Lab 5John MartinNo ratings yet
- Power Supply Design Guidelines v0.4 PDFDocument27 pagesPower Supply Design Guidelines v0.4 PDFdimitaring100% (1)
- UPSEE - Full Paper - 2009Document40 pagesUPSEE - Full Paper - 2009Abhishek Kumar100% (2)
- Datasheet AME8815Document17 pagesDatasheet AME8815ALFONZO DANIELNo ratings yet
- Amateur Radio Exam Reviewer (Class B)Document4 pagesAmateur Radio Exam Reviewer (Class B)Emmanuel Vallejos100% (10)
- MR300 SWR Analyzer User ManualDocument31 pagesMR300 SWR Analyzer User ManualMircea Carnicianu100% (1)
- LMX 2572Document90 pagesLMX 2572AnonNo ratings yet
- Rele Sobrecorriente 7SK8854 SiemensDocument25 pagesRele Sobrecorriente 7SK8854 SiemensJoseNo ratings yet
- Course Title: Basic ElectronicsDocument1 pageCourse Title: Basic ElectronicsMicrosoft WelfareNo ratings yet
- CC1N7471en 19.11.2021: Smart InfrastructureDocument30 pagesCC1N7471en 19.11.2021: Smart Infrastructuredimitri shalikianiNo ratings yet
- Sunfire Amplifier Whitepaper PDFDocument12 pagesSunfire Amplifier Whitepaper PDFDirk SloosNo ratings yet
- Objective ElectronicsDocument159 pagesObjective ElectronicsPrakash Upadhyay78% (9)
- LM 5017Document26 pagesLM 5017Joseph BernardNo ratings yet
- Power System StudiesDocument46 pagesPower System Studiesadau100% (1)
- 50 Best of Compressor Start Relay Wiring DiagramDocument1 page50 Best of Compressor Start Relay Wiring DiagramMtu FlaniNo ratings yet
- Souad TOUAIRI R2Document13 pagesSouad TOUAIRI R2sayyouriNo ratings yet
- Quint - PS - 100 - 240ac24 DC40Document15 pagesQuint - PS - 100 - 240ac24 DC40AndyNo ratings yet
- AllanGreenwood Capitulos 1 y 2Document48 pagesAllanGreenwood Capitulos 1 y 2Paul RamosNo ratings yet
- Datasheet Diodo PinDocument4 pagesDatasheet Diodo PinJose Steven Calderon NeiraNo ratings yet
- 5 KV & 10 KV Insulation Resistance Testers: User ManualDocument27 pages5 KV & 10 KV Insulation Resistance Testers: User ManualRizki SulistyowatiNo ratings yet
- EI-450 User Manual: Everything You Need to KnowDocument96 pagesEI-450 User Manual: Everything You Need to KnowKhondoker Nayeem Ul HaqueNo ratings yet
- The Journal of Engineering - 2020 - Meah - Design Build and Test Drive A FSAE Electric Vehicle PDFDocument7 pagesThe Journal of Engineering - 2020 - Meah - Design Build and Test Drive A FSAE Electric Vehicle PDFZahid AhmadNo ratings yet
- c E mc: Pan Pearl River Delta Physics Olympiad 2008 Part-1 (Total 6 Problems) 卷-1(共 6 题)Document8 pagesc E mc: Pan Pearl River Delta Physics Olympiad 2008 Part-1 (Total 6 Problems) 卷-1(共 6 题)Matheus PinheiroNo ratings yet
- Risk Based Assessment of Subsynchronous Resonance in ACDC SystemsDocument233 pagesRisk Based Assessment of Subsynchronous Resonance in ACDC Systems손호익No ratings yet
- Physics BansalDocument741 pagesPhysics BansalSaurav Sundarka25% (4)
- HP Zbook 15 G5 Mobile Workstation - Product End-of-Life Disassembly InstructionsDocument5 pagesHP Zbook 15 G5 Mobile Workstation - Product End-of-Life Disassembly InstructionscocoNo ratings yet
- EE and EEE Control and Instrumentation Laboratory ManualDocument19 pagesEE and EEE Control and Instrumentation Laboratory ManualBALAKRISHNANNo ratings yet
- Department of Ej/En/Eq/Et/Ex 22425 Consumer Electronics (Cel) McqsDocument30 pagesDepartment of Ej/En/Eq/Et/Ex 22425 Consumer Electronics (Cel) McqsSaquibh ShaikhNo ratings yet
- V200 User ManualDocument171 pagesV200 User ManualuriahskyNo ratings yet