You might also like
- Micom - 211 Motor Protection Relay Used For 275kwDocument8 pagesMicom - 211 Motor Protection Relay Used For 275kwShrikant KajaleNo ratings yet
- Start Inhibit FunctionDocument11 pagesStart Inhibit Functionlimkokchiang809No ratings yet
- Motor ProtectionDocument47 pagesMotor ProtectionKhaled RabeaNo ratings yet
- SPAJ 111C - Sensitive Earth Fault ProtectionDocument48 pagesSPAJ 111C - Sensitive Earth Fault ProtectionintoisrNo ratings yet
- Measuring and Monitoring Relays - ABBDocument76 pagesMeasuring and Monitoring Relays - ABBpevareNo ratings yet
- Maximum Demand ControllerDocument4 pagesMaximum Demand ControllerDIWAKAR NNo ratings yet
- TESTING OF MOTOR PROTECTION RELAY P225Document2 pagesTESTING OF MOTOR PROTECTION RELAY P225Muthu Kumar100% (1)
- Pre-Commissioning Test Report For Numerical Relay: ProjectDocument3 pagesPre-Commissioning Test Report For Numerical Relay: ProjectHari haranNo ratings yet
- 3ph Transformer - Short Circuit TestDocument7 pages3ph Transformer - Short Circuit TestlpestanaNo ratings yet
- 07a Backup OCEF Relay - Tech. Data Check List CompletedDocument6 pages07a Backup OCEF Relay - Tech. Data Check List CompletedAnupam0103No ratings yet
- Actuator With Integral ControlDocument4 pagesActuator With Integral Controlysr3ee6926No ratings yet
- Alstom Scs Skd-Ske11Document4 pagesAlstom Scs Skd-Ske11Nihal K JoshiNo ratings yet
- FM Spae01 en BDocument12 pagesFM Spae01 en BSudhakar YsNo ratings yet
- Gen 12MW PDFDocument11 pagesGen 12MW PDFTesta Bonaventura Vincenzo100% (1)
- Agc Plant Management Installation Instructions 4189340926 UkDocument61 pagesAgc Plant Management Installation Instructions 4189340926 UkFernando Souza castroNo ratings yet
- Alternators: Synchronising & Load SharingDocument18 pagesAlternators: Synchronising & Load SharingDan ManeaNo ratings yet
- MC 31Document33 pagesMC 31nick321walkerNo ratings yet
- Ashida RelayDocument233 pagesAshida Relaysvanand88100% (1)
- Electrical relay types and characteristicsDocument5 pagesElectrical relay types and characteristicsSLDC DDNo ratings yet
- Air Circuit Breaker Technical Specifications and FeaturesDocument6 pagesAir Circuit Breaker Technical Specifications and FeaturesnogeshwarNo ratings yet
- 8BK88 O&M ManualDocument36 pages8BK88 O&M ManualsyamprasadNo ratings yet
- Over CurrentDocument30 pagesOver CurrentbaluNo ratings yet
- Mc31a Rev5Document33 pagesMc31a Rev5sanju939No ratings yet
- Test Report For Motor Protection Relay-Sel 710: DATE: 21.06.2018Document3 pagesTest Report For Motor Protection Relay-Sel 710: DATE: 21.06.2018Jayam kondanNo ratings yet
- 07-02-2018 12-59-46 - etaSMART APFC Relay - Catalogue PDFDocument5 pages07-02-2018 12-59-46 - etaSMART APFC Relay - Catalogue PDFIshwar ranawatNo ratings yet
- Setting Sheet of 7UM622 For 25MW GPRDocument16 pagesSetting Sheet of 7UM622 For 25MW GPRSrini100% (1)
- 3300 Series User ManualDocument24 pages3300 Series User ManualjuniNo ratings yet
- Study of Over Current RelayDocument6 pagesStudy of Over Current RelayDarshana ChathurangaNo ratings yet
- Ge-Digital Generator Protection Relay PDFDocument281 pagesGe-Digital Generator Protection Relay PDFAnonymous qJXSQDSoENo ratings yet
- p345 Technical ManualDocument1 pagep345 Technical ManualabhayambujNo ratings yet
- ELECTRICAL FEEDER PROTECTION WITH OVER CURRENT AND EARTH FAULT RELAYDocument36 pagesELECTRICAL FEEDER PROTECTION WITH OVER CURRENT AND EARTH FAULT RELAYKoushik MaityNo ratings yet
- Testing Micom P243Document3 pagesTesting Micom P243DEADMANNo ratings yet
- 1or 2 Pole Breaker For TractionDocument8 pages1or 2 Pole Breaker For Tractiongyanendra_vatsa4380No ratings yet
- Tata Power Generator Protection Relay Test ReportDocument69 pagesTata Power Generator Protection Relay Test ReportJayamkondanNo ratings yet
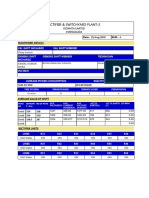
- Rectifier & Switchyard Plant-2: Vedanta Limited JharsugudaDocument3 pagesRectifier & Switchyard Plant-2: Vedanta Limited Jharsugudajilu_silu100% (1)
- Supervision RelayDocument3 pagesSupervision RelayBassem Mostafa100% (1)
- 7UM62 Installation Instr 02Document6 pages7UM62 Installation Instr 02Eduardo Garcia PNo ratings yet
- VCB Manual ENG Ver.05 Dated 01.03.07Document81 pagesVCB Manual ENG Ver.05 Dated 01.03.07mn090078dNo ratings yet
- Chapter 8.2-A Commissioning of The Micom P220 RelayDocument22 pagesChapter 8.2-A Commissioning of The Micom P220 RelayGaurang PatelNo ratings yet
- QJ71C24N PDFDocument358 pagesQJ71C24N PDFalbertoNo ratings yet
- Generator Protection: Relay Setting CalculationsDocument112 pagesGenerator Protection: Relay Setting CalculationsSharath KotaNo ratings yet
- CSC-150 Numerical Busbar Protection Equipment Manual - F0SF.450.045 - Er - V1.10Document167 pagesCSC-150 Numerical Busbar Protection Equipment Manual - F0SF.450.045 - Er - V1.10NandgulabDeshmukh100% (1)
- Sirius Control SystemDocument8 pagesSirius Control SystemMeesanNo ratings yet
- Testing Maintenance Troubleshooting ACBDocument16 pagesTesting Maintenance Troubleshooting ACB322399mk7086No ratings yet
- VDT - 877 - Annexure-IADocument176 pagesVDT - 877 - Annexure-IAprati121100% (1)
- IRXm Product GuideDocument8 pagesIRXm Product Guidedeepak2628No ratings yet
- HWX-O&M ManualDocument16 pagesHWX-O&M ManualAONLANo ratings yet
- Protection Calculations 7SJ531Document66 pagesProtection Calculations 7SJ531feromagnetizamNo ratings yet
- ADR244ADocument36 pagesADR244AVirender RanaNo ratings yet
- Installation Testing Troubleshooting Starters Overload RelaysDocument34 pagesInstallation Testing Troubleshooting Starters Overload RelaysGogula Gunasekhar100% (1)
- ADR233BDocument19 pagesADR233BNamrata ShettiNo ratings yet
- HWX SparesDocument6 pagesHWX SparesMohan SaravanaNo ratings yet
- 239 Motor Protection RelayDocument8 pages239 Motor Protection Relaydes1982No ratings yet
- Motor Protection ManualDocument20 pagesMotor Protection ManualNirmal mehtaNo ratings yet
- Ramde Motor Protection RelayDocument8 pagesRamde Motor Protection RelayishhumzpNo ratings yet
- Motor Protection ToshibaDocument24 pagesMotor Protection ToshibaAriesFranandaPanjaitanNo ratings yet
- Micom P225 Motor Protection RelayDocument12 pagesMicom P225 Motor Protection RelayJatinder SainiNo ratings yet
- Ramde RelayDocument8 pagesRamde RelayculwavesNo ratings yet
- MM 2Document8 pagesMM 2John Arllan DiestroNo ratings yet
- 369 Specs-GeDocument9 pages369 Specs-GesachianjaliNo ratings yet
- Commissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEDocument5 pagesCommissioning Generator AVR, PSS and Model Validation: Wenyan Gu, Member, IEEEAlexander Osorio100% (1)
- Electrical Machines by Charles I HubertDocument65 pagesElectrical Machines by Charles I HubertAhmad Touqir65% (20)
- S 80 FunDocument272 pagesS 80 FunAlexander OsorioNo ratings yet
- Multilin 850: GE Digital EnergyDocument16 pagesMultilin 850: GE Digital EnergyAlexander OsorioNo ratings yet
- Multilin 850: GE Digital EnergyDocument16 pagesMultilin 850: GE Digital EnergyAlexander OsorioNo ratings yet
- 7SA522x Manual A3 v043003 UsDocument592 pages7SA522x Manual A3 v043003 UsDrastaru ValentinNo ratings yet
- DT09Document10 pagesDT09Alexander OsorioNo ratings yet
- Chilled Water Flow, Pipe SizeDocument3 pagesChilled Water Flow, Pipe SizeSatya N.GNo ratings yet
- QCAI476 LfiltersDocument11 pagesQCAI476 LfilterscivodulNo ratings yet
- Engr. Jesus Rangcasajo ECE 321 InstructorDocument20 pagesEngr. Jesus Rangcasajo ECE 321 InstructorVijay S PatilNo ratings yet
- Arkaprava Bhattacharya Civil Engineering Portfolio: Email IDDocument9 pagesArkaprava Bhattacharya Civil Engineering Portfolio: Email IDArkaprava BhattacharyaNo ratings yet
- AC CIRCUIT Power AnalysisDocument48 pagesAC CIRCUIT Power AnalysisFerrer Francia Nel SabasNo ratings yet
- Experiment 3Document18 pagesExperiment 3Simyeen LeongNo ratings yet
- CamScanner Scanned DocumentDocument1,284 pagesCamScanner Scanned DocumentGeorgeanne 25100% (1)
- Burj KhalifaDocument29 pagesBurj KhalifaAnonymous hprsT3WlPNo ratings yet
- Liquid Retaining Reinforced Concrete Section To BS 8007& BS 8110Document1 pageLiquid Retaining Reinforced Concrete Section To BS 8007& BS 8110James LaurentNo ratings yet
- Contacts From MotorolaDocument26 pagesContacts From MotorolamvayangcoNo ratings yet
- Mother Board INTEL D945GNT - TechProdSpecDocument94 pagesMother Board INTEL D945GNT - TechProdSpecVinoth KumarNo ratings yet
- ADJUST FUEL TIMINGDocument3 pagesADJUST FUEL TIMINGSanjay MadakaNo ratings yet
- Slab On Grade (Sizing) - Zamil PDFDocument1 pageSlab On Grade (Sizing) - Zamil PDFchidsalazarNo ratings yet
- Supersot Sot23 NPN Silicon Power (Switching) Transistors: Fmmt617 Fmmt618 Fmmt619 Fmmt624 Fmmt625Document4 pagesSupersot Sot23 NPN Silicon Power (Switching) Transistors: Fmmt617 Fmmt618 Fmmt619 Fmmt624 Fmmt625BBFulNo ratings yet
- This Manual Includes: Repair Procedures Fault Codes Electrical and Hydraulic SchematicsDocument298 pagesThis Manual Includes: Repair Procedures Fault Codes Electrical and Hydraulic SchematicsJugaro OscarNo ratings yet
- SRM-RMPM Registration Report For EvDocument3 pagesSRM-RMPM Registration Report For EvAAKASH J (RA2111043020035)No ratings yet
- LS VCB Mec PDFDocument100 pagesLS VCB Mec PDFDarrell Wilson100% (2)
- EMSA MED-PrasentationDocument20 pagesEMSA MED-PrasentationCostin RotaruNo ratings yet
- The Poem of The Man God Vol 2 by Maria ValtortaDocument8 pagesThe Poem of The Man God Vol 2 by Maria ValtortaOtieno SteveNo ratings yet
- Electronic Patient Record Use During Ward Rounds: A Qualitative Study of Interaction Between Medical StaffDocument8 pagesElectronic Patient Record Use During Ward Rounds: A Qualitative Study of Interaction Between Medical StaffpsikubNo ratings yet
- Criteria DesandingDocument13 pagesCriteria Desandinglebrix100% (1)
- Development Control Rules 2014Document155 pagesDevelopment Control Rules 2014ChandraPrabhaNo ratings yet
- Userspace Drivers in LinuxDocument4 pagesUserspace Drivers in LinuxJeffi Edward100% (1)
- BUSINESS RESEARCH CHALLENGESDocument12 pagesBUSINESS RESEARCH CHALLENGESShilpa JadhavNo ratings yet
- GST Project Report SummaryDocument14 pagesGST Project Report SummaryWwe MomentsNo ratings yet
- ARAMCO UT Inspection Checklist - SAIC-UT-2001Document6 pagesARAMCO UT Inspection Checklist - SAIC-UT-2001Anonymous hBBam1n100% (1)
- Market of Turboshaft EnginesDocument22 pagesMarket of Turboshaft EnginesThomas MouraNo ratings yet
- Major Events ReviewedDocument81 pagesMajor Events ReviewedNanda Win LwinNo ratings yet
- Delft3D-TRIANA User ManualDocument54 pagesDelft3D-TRIANA User ManualAnonymous K02EhzNo ratings yet
- CD Changer Service ManualDocument72 pagesCD Changer Service Manualsalloum3No ratings yet