You might also like
- Electronics Explained: Fundamentals for Engineers, Technicians, and MakersFrom EverandElectronics Explained: Fundamentals for Engineers, Technicians, and MakersRating: 5 out of 5 stars5/5 (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ethical Leadership Karen May P. UrlandaDocument8 pagesEthical Leadership Karen May P. UrlandaKaren May UrlandaNo ratings yet
- Acceptance and Presentment For AcceptanceDocument27 pagesAcceptance and Presentment For AcceptanceAndrei ArkovNo ratings yet
- Earth Fault RelayDocument12 pagesEarth Fault Relaysabill arasyidNo ratings yet
- Aplicacion Autotransformador 7ut613Document3 pagesAplicacion Autotransformador 7ut613santiagoramosNo ratings yet
- Paralleling Cts For Line Differential ProtectionDocument15 pagesParalleling Cts For Line Differential ProtectionYeissonSanabria100% (1)
- Realistic CT SpecsDocument7 pagesRealistic CT Specskapil100% (6)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Current Transformer Errors and Transformer InrushDocument24 pagesCurrent Transformer Errors and Transformer InrushFernandoMartínIranzoNo ratings yet
- Final Biomechanics of Edentulous StateDocument114 pagesFinal Biomechanics of Edentulous StateSnigdha SahaNo ratings yet
- CT PolarityDocument2 pagesCT Polarityrvim0002100% (1)
- CT Saturation CurveDocument6 pagesCT Saturation CurveMichael Parohinog Gregas100% (1)
- Testing Numerical Transformer Diff RelaysDocument11 pagesTesting Numerical Transformer Diff Relayshizbi70% (1)
- Busbar ProtectionDocument24 pagesBusbar ProtectionAhmed HussainNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Intermediate Accounting Testbank 2Document419 pagesIntermediate Accounting Testbank 2SOPHIA97% (30)
- SHIPPING TERMSDocument1 pageSHIPPING TERMSGung Mayura100% (1)
- MODULE III - Protection in Power SystemDocument102 pagesMODULE III - Protection in Power SystemZakariaNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- 06 - Power System ProtectionDocument99 pages06 - Power System ProtectionMohamed WahidNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Applying CTs in Protection Schemes For Transformers, Generators, MachinesDocument10 pagesApplying CTs in Protection Schemes For Transformers, Generators, MachinesrajeshNo ratings yet
- SA2008-000246 en Influence of Stray Flux On Protection SystemsDocument6 pagesSA2008-000246 en Influence of Stray Flux On Protection Systemshydrazine4No ratings yet
- Measurement of Three-Phase Transformer Derating and Reactive Power Demand Under Nonlinear Loading ConditionsDocument8 pagesMeasurement of Three-Phase Transformer Derating and Reactive Power Demand Under Nonlinear Loading ConditionsSaurav KafleNo ratings yet
- GRB100 Rev3Document0 pagesGRB100 Rev3comportNo ratings yet
- Fault Resistance, Location and Inception Angle Effects On DC Offset of The Fault CurrentsDocument6 pagesFault Resistance, Location and Inception Angle Effects On DC Offset of The Fault CurrentsItalo ChiarellaNo ratings yet
- Differential Protection for Power Transformers Using RelayDocument5 pagesDifferential Protection for Power Transformers Using RelayChandan DwivediNo ratings yet
- 06227522Document4 pages06227522Muhammad SulaimanNo ratings yet
- Differential Protection RelayDocument39 pagesDifferential Protection RelayIhtisham uddinNo ratings yet
- Differential Relay With Adaptation During Saturation PeriodDocument6 pagesDifferential Relay With Adaptation During Saturation Periodasim saeedNo ratings yet
- AP PTC 2012 19 Teratam EnuDocument7 pagesAP PTC 2012 19 Teratam EnubcqbaoNo ratings yet
- A New Differential Protection Scheme For Busbar Considering CT Saturation EffectDocument4 pagesA New Differential Protection Scheme For Busbar Considering CT Saturation EffectMuruganNo ratings yet
- Special ConsCBDocument7 pagesSpecial ConsCBBala MNo ratings yet
- CIGRE NOV 21 23 CT Saturation DetectionDocument4 pagesCIGRE NOV 21 23 CT Saturation DetectionMarcelo Andrés Ravest VeasNo ratings yet
- CT Sizing For Generator and Transformer Protective RelaysDocument7 pagesCT Sizing For Generator and Transformer Protective RelaysFrancisco Reis FarfilhoNo ratings yet
- DC Time Constant EstimationDocument6 pagesDC Time Constant Estimationrasheed313No ratings yet
- Applying CTs With Digital Ground RelaysDocument9 pagesApplying CTs With Digital Ground RelaysAriesFranandaPanjaitanNo ratings yet
- Current-Transformer Saturation Compensation For Transformer Differential RelaysDocument10 pagesCurrent-Transformer Saturation Compensation For Transformer Differential RelaysAlberto MedNo ratings yet
- TRVDocument4 pagesTRVSumit SawaiNo ratings yet
- CT Saturation 1Document6 pagesCT Saturation 111389No ratings yet
- M. Mikrmt: and BDocument4 pagesM. Mikrmt: and BproteccionesNo ratings yet
- A Wavelet-Based Transformer Differential ProtectionDocument11 pagesA Wavelet-Based Transformer Differential ProtectionAhmed OsmanNo ratings yet
- Chopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaDocument8 pagesChopper Controlled DC Drive: INSTRUCTED BY: Dr. BuddhikaNipuna Thushara WijesekaraNo ratings yet
- CT Saturation Study Using PSCAD JA and Lewis ModelsDocument6 pagesCT Saturation Study Using PSCAD JA and Lewis ModelsLUIS ANGEL YARANGA SANTINo ratings yet
- Differential Protection of Power Transformers Based On Negative Sequence Currents DetectionDocument5 pagesDifferential Protection of Power Transformers Based On Negative Sequence Currents DetectionSanaullah KakaNo ratings yet
- Ger 3961 PDFDocument16 pagesGer 3961 PDFBalan PalaniappanNo ratings yet
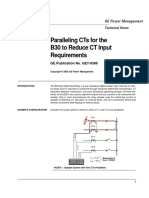
- GE - Paralleling CT's For B30Document2 pagesGE - Paralleling CT's For B30Rafael AnastacioNo ratings yet
- Comprehensive Approach to CT Field DiagnosticsDocument15 pagesComprehensive Approach to CT Field DiagnosticsSamuel AdamuNo ratings yet
- Current-Transformer Phase-Shift Compensation and CalibrationDocument7 pagesCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjNo ratings yet
- Effects of Dynamic Fault Impedance on Transmission Line Fault LocationDocument5 pagesEffects of Dynamic Fault Impedance on Transmission Line Fault Locationjijo123408No ratings yet
- Georgia Tech Protective Relaying Conference Paper on Transformer Differential Relay SignalsDocument24 pagesGeorgia Tech Protective Relaying Conference Paper on Transformer Differential Relay SignalsYaidel RodriguezNo ratings yet
- A Wavelet Power Based Algorithm For Synchronous Generator ProtectionDocument6 pagesA Wavelet Power Based Algorithm For Synchronous Generator ProtectionsunitharajababuNo ratings yet
- Zahraaalturaihee, 5Document9 pagesZahraaalturaihee, 5Amala JosephNo ratings yet
- Virtual Instrument Based Fault Classification in Power Transformers Using Artificial Neural NetworksDocument5 pagesVirtual Instrument Based Fault Classification in Power Transformers Using Artificial Neural NetworksNituNo ratings yet
- Core Losses Under DC Bias Condition Based On Steinmetz ParametersDocument8 pagesCore Losses Under DC Bias Condition Based On Steinmetz ParametersAlan SoulieNo ratings yet
- Combined Wavelet Transform and Regression Technique For Secondary Current Compensation of Current TransformersDocument7 pagesCombined Wavelet Transform and Regression Technique For Secondary Current Compensation of Current TransformersMatheus FelicioNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Heterojunction Bipolar Transistors for Circuit Design: Microwave Modeling and Parameter ExtractionFrom EverandHeterojunction Bipolar Transistors for Circuit Design: Microwave Modeling and Parameter ExtractionNo ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- Breaker Timing & Tan Delta ResultsDocument5 pagesBreaker Timing & Tan Delta ResultsRitesh JaiswalNo ratings yet
- Distribution Protection Question and AnswerDocument3 pagesDistribution Protection Question and AnswerRitesh JaiswalNo ratings yet
- CT Polarity On A SIPROTEC Relay - Quick Start InstructionsDocument5 pagesCT Polarity On A SIPROTEC Relay - Quick Start InstructionssherubdNo ratings yet
- Distribution Protection Question and AnswerDocument3 pagesDistribution Protection Question and AnswerRitesh JaiswalNo ratings yet
- Busbar ProtectionDocument17 pagesBusbar ProtectionGaurav SachanNo ratings yet
- CT Analyzer IEEE Protection ENUDocument12 pagesCT Analyzer IEEE Protection ENURitesh JaiswalNo ratings yet
- DELTA 4000: Reference Manual Applications GuideDocument48 pagesDELTA 4000: Reference Manual Applications GuidepetarlNo ratings yet
- How To Open and Convert An .SCM FileDocument5 pagesHow To Open and Convert An .SCM FilejackNo ratings yet
- Namal College Admissions FAQsDocument3 pagesNamal College Admissions FAQsSauban AhmedNo ratings yet
- Siyaram S AR 18-19 With Notice CompressedDocument128 pagesSiyaram S AR 18-19 With Notice Compressedkhushboo rajputNo ratings yet
- Major Swine BreedsDocument1 pageMajor Swine BreedsDana Dunn100% (1)
- Farmers InterviewDocument5 pagesFarmers Interviewjay jariwalaNo ratings yet
- WSM 0000410 01Document64 pagesWSM 0000410 01Viktor Sebastian Morales CabreraNo ratings yet
- Discount & Percentage Word Problems SolutionsDocument4 pagesDiscount & Percentage Word Problems SolutionsrheNo ratings yet
- 59 - 1006 - CTP-Final - 20200718 PDFDocument11 pages59 - 1006 - CTP-Final - 20200718 PDFshubh.icai0090No ratings yet
- Macdonald v. National City Bank of New YorkDocument6 pagesMacdonald v. National City Bank of New YorkSecret SecretNo ratings yet
- Memento Mori: March/April 2020Document109 pagesMemento Mori: March/April 2020ICCFA StaffNo ratings yet
- BIU and EU functions in 8086 microprocessorDocument12 pagesBIU and EU functions in 8086 microprocessorDaksh ShahNo ratings yet
- CCTV8 PDFDocument2 pagesCCTV8 PDFFelix John NuevaNo ratings yet
- Troubleshooting Edge Quality: Mild SteelDocument14 pagesTroubleshooting Edge Quality: Mild SteelAnonymous U6yVe8YYCNo ratings yet
- DSP Lab Record Convolution ExperimentsDocument25 pagesDSP Lab Record Convolution ExperimentsVishwanand ThombareNo ratings yet
- WM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersDocument4 pagesWM3000U - WM3000 I: Measuring Bridges For Voltage Transformers and Current TransformersEdgar JimenezNo ratings yet
- Mosaic Maker - Instructions PDFDocument4 pagesMosaic Maker - Instructions PDFRoderickHenryNo ratings yet
- Fleck 3150 Downflow: Service ManualDocument40 pagesFleck 3150 Downflow: Service ManualLund2016No ratings yet
- Concept, Types, Characteristics and ClassificationsDocument6 pagesConcept, Types, Characteristics and ClassificationsCJ FaNo ratings yet
- 01 NumberSystemsDocument49 pages01 NumberSystemsSasankNo ratings yet
- Feb 22-Additional CasesDocument27 pagesFeb 22-Additional CasesYodh Jamin OngNo ratings yet
- fr1177e-MOTOR CUMMINS 195HPDocument2 pagesfr1177e-MOTOR CUMMINS 195HPwilfredo rodriguezNo ratings yet
- Password CrackingDocument13 pagesPassword CrackingBlue MagicNo ratings yet
- Merlin Gerin Medium VoltageDocument10 pagesMerlin Gerin Medium VoltagekjfenNo ratings yet
- (Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetsDocument22 pages(Lesson 10-1) - Quality Assurance, Hemocytometry, Thoma PipetselleNo ratings yet
- Whats The Average 100 M Time For An Olympics - Google SearchDocument1 pageWhats The Average 100 M Time For An Olympics - Google SearchMalaya KnightonNo ratings yet