You might also like
- Lecture 1Document51 pagesLecture 1MOHIT PANTNo ratings yet
- Finite Element Analysis (FEA) IntroductionDocument49 pagesFinite Element Analysis (FEA) Introductionabdulla_alazzawiNo ratings yet
- FEA TheoryDocument49 pagesFEA TheoryRavi Vikrant MalhotraNo ratings yet
- CHAPTER 1 - Introduction To Finite Element Analysis - V2Document45 pagesCHAPTER 1 - Introduction To Finite Element Analysis - V2Alias HedgeNo ratings yet
- Introduction To Finite Element Analysis (FEA) or Finite Element Method (FEM)Document20 pagesIntroduction To Finite Element Analysis (FEA) or Finite Element Method (FEM)Patrick GlomskiNo ratings yet
- Introduction To Finite Element Method PDFDocument13 pagesIntroduction To Finite Element Method PDFamodhyaNo ratings yet
- Introduction To Finite Element ModelingDocument5 pagesIntroduction To Finite Element Modelingmastura_rahim_3No ratings yet
- Fem NotesDocument11 pagesFem NotesvenkiteshksNo ratings yet
- Short Notes Unit - 2-FEMDocument33 pagesShort Notes Unit - 2-FEMgurumahesh gNo ratings yet
- CES 512: Finite Element Method Introduction, Theory, Applications & ImplementationDocument32 pagesCES 512: Finite Element Method Introduction, Theory, Applications & Implementationshamsukarim2009No ratings yet
- Finite Element Modelling SoftwareDocument27 pagesFinite Element Modelling SoftwarerkNo ratings yet
- Department of Civil EngineeringDocument13 pagesDepartment of Civil Engineeringbinodjohndas0% (1)
- Fem Short AnswersDocument8 pagesFem Short Answers21k95a0324No ratings yet
- Fea 7 Fem ConceptsDocument104 pagesFea 7 Fem Conceptsjsmnjasmines100% (1)
- Caa Lab IntroductionDocument6 pagesCaa Lab IntroductionLokesh ReddyNo ratings yet
- DiscretisationDocument18 pagesDiscretisationMaw IubuybNo ratings yet
- Finite Element Analysis QuestionsDocument6 pagesFinite Element Analysis QuestionssathishneNo ratings yet
- Node Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)Document32 pagesNode Nodal Degrees of Freedom: 1. The Definition of The Finite Element Method (FEM)KomarudinNo ratings yet
- ModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7Document4 pagesModalAnalysisOfDriveShaftUsingFEA (4 7) 839f8a01 05f1 4cb7 9692 54b24438f5c7layiro2No ratings yet
- Development of Truss EquationsDocument63 pagesDevelopment of Truss EquationszcdscNo ratings yet
- Equbay Leake Mekelle University Ethiopian Institute of Technology-Mekelle (Eit-M) School of Mechanical and Industrial Engineering Mekelle, EthiopiaDocument13 pagesEqubay Leake Mekelle University Ethiopian Institute of Technology-Mekelle (Eit-M) School of Mechanical and Industrial Engineering Mekelle, EthiopiadanielNo ratings yet
- Ellore 632 509 Department of MechanicalDocument6 pagesEllore 632 509 Department of MechanicalBALAKRISHNANNo ratings yet
- Chapter 3Document16 pagesChapter 3eliasNo ratings yet
- Bar Elements in 2D SpaceDocument49 pagesBar Elements in 2D SpaceMohd NasimNo ratings yet
- FEM IntroductionDocument29 pagesFEM IntroductionKrishna MurthyNo ratings yet
- Aim:-Study of FEM (Finite Element Method) Finite-Element MethodDocument9 pagesAim:-Study of FEM (Finite Element Method) Finite-Element MethodAshley Silvester AnthonyNo ratings yet
- Vibration AnalysisDocument17 pagesVibration AnalysispmagrawalNo ratings yet
- FEM BasicDocument70 pagesFEM Basicformech100% (1)
- Unit I Part-1Document7 pagesUnit I Part-1KavyaNo ratings yet
- Finite Element Analysis History and ApplicationsDocument34 pagesFinite Element Analysis History and Applicationsसंकेत कलगुटकरNo ratings yet
- Varying Shape, Boundary Conditions and Loads Solutions Obtained Are ApproximateDocument17 pagesVarying Shape, Boundary Conditions and Loads Solutions Obtained Are ApproximateHarsh PatelNo ratings yet
- Advanced Finite Element: Professor: Carlos FelippaDocument42 pagesAdvanced Finite Element: Professor: Carlos FelippaHamed MemarianNo ratings yet
- Notes For FemDocument35 pagesNotes For FemG. Somasekhar SomuNo ratings yet
- An Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical SimulationDocument16 pagesAn Introduction To Finite Element Methods: Jass 05 Seminar: Interplay of Mathematical Modeling and Numerical Simulationaviraj2006No ratings yet
- Fea ImpDocument14 pagesFea ImpC61 Mahesh RathodNo ratings yet
- CAE Lab ManualDocument30 pagesCAE Lab Manualsyampnaidu100% (1)
- C 5 O - F E S F: Hapter NE Dimensional Inite Lement Hape UnctionsDocument48 pagesC 5 O - F E S F: Hapter NE Dimensional Inite Lement Hape UnctionsElmar CuellarNo ratings yet
- The Direct Method: Model Based Simulation of Spring SystemsDocument25 pagesThe Direct Method: Model Based Simulation of Spring SystemsHusnain100% (1)
- 1.4.1 Loading Conditions: Module 1: Introduction To Finite Element Analysis Lecture 4: Steps in Finite Element AnalysisDocument7 pages1.4.1 Loading Conditions: Module 1: Introduction To Finite Element Analysis Lecture 4: Steps in Finite Element AnalysisB S Praveen BspNo ratings yet
- Modeling and Numerical Instability ProblemsDocument3 pagesModeling and Numerical Instability ProblemsSunil PandeyNo ratings yet
- Introduction To Finite Element Methods PDFDocument34 pagesIntroduction To Finite Element Methods PDFThirumalaimuthukumaranMohanNo ratings yet
- Somali National University: Finite Elements Design (FEM5901)Document22 pagesSomali National University: Finite Elements Design (FEM5901)Mohamed FarmaajoNo ratings yet
- FEM - Cont. & Chapt-1 - Slide PresentationDocument10 pagesFEM - Cont. & Chapt-1 - Slide PresentationMohammed B TuseNo ratings yet
- Fem 2marksDocument33 pagesFem 2marksSudeepHandikherkarNo ratings yet
- Finite Element Analysis Steps in FEADocument14 pagesFinite Element Analysis Steps in FEASwami NathanNo ratings yet
- CAMA Lab Record: Course Code: 18MEL66 Course: Computer Aided Modelling and Analysis LabDocument19 pagesCAMA Lab Record: Course Code: 18MEL66 Course: Computer Aided Modelling and Analysis LabVinayaka GpNo ratings yet
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDocument22 pagesSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodhoseriNo ratings yet
- Cad Unit Iii C 16.08Document12 pagesCad Unit Iii C 16.08Mohd InayathNo ratings yet
- Basic Theory: σ ε are the vectors of the stress and strain components at any point, respectively, d isDocument1 pageBasic Theory: σ ε are the vectors of the stress and strain components at any point, respectively, d isMadiha__JabbarNo ratings yet
- ME2353 Finite Element Analysis Lecture NotesDocument34 pagesME2353 Finite Element Analysis Lecture NoteschinnaNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Power Geometry in Algebraic and Differential EquationsFrom EverandPower Geometry in Algebraic and Differential EquationsNo ratings yet
- SD 14 eDocument12 pagesSD 14 eseaqu3stNo ratings yet
- Mobilgard HSD Plus 15W40 Engine Oil ExxonMobil MarineDocument2 pagesMobilgard HSD Plus 15W40 Engine Oil ExxonMobil MarineM. FuentesNo ratings yet
- Angular Momentum (Momen Anguler)Document35 pagesAngular Momentum (Momen Anguler)bat.laugh100% (1)
- Ec T30 PDFDocument1,500 pagesEc T30 PDFNorman Valle Sáenz100% (1)
- Machine Design Lesson on Buckling of Slender ColumnsDocument10 pagesMachine Design Lesson on Buckling of Slender ColumnsCarl JavierNo ratings yet
- Hydraulic FittingsDocument411 pagesHydraulic Fittingspaolomoreano88No ratings yet
- Aquatech B Series Operators ManualDocument169 pagesAquatech B Series Operators ManualJader Leyva100% (2)
- Quadracci Pavilion - Hind Bitar PDFDocument10 pagesQuadracci Pavilion - Hind Bitar PDFHeind BitarNo ratings yet
- Structural Mechanics 2-Lesson 4-Buckling (Complete Note)Document27 pagesStructural Mechanics 2-Lesson 4-Buckling (Complete Note)Janith amarawickramaNo ratings yet
- Compre 3 Problem Set No. 1Document8 pagesCompre 3 Problem Set No. 1Jhundel Factor PajarillagaNo ratings yet
- Optimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisDocument5 pagesOptimized Design and Static, Dynamic Analysis of Disc Brake Using Finite Element AnalysisVinayak ImadiNo ratings yet
- Shop Manual Supplement Komatsu PC400 6, PC400LC 6, PC450 6, PC450LCDocument38 pagesShop Manual Supplement Komatsu PC400 6, PC400LC 6, PC450 6, PC450LCMilad Rahimi100% (2)
- CE1354 - Design of Steel Structures Two Mark Questions AnswersDocument19 pagesCE1354 - Design of Steel Structures Two Mark Questions AnswersFinney Wilson100% (1)
- Inv2 - 2021 - 11 - 23 00 - 56 - 24Document1 pageInv2 - 2021 - 11 - 23 00 - 56 - 24MayangNo ratings yet
- Astm A352-A352m-06-1Document5 pagesAstm A352-A352m-06-1Kishor JadhavNo ratings yet
- Directional Controls: Solenoid Operated Directional Control ValvesDocument16 pagesDirectional Controls: Solenoid Operated Directional Control Valvesreincidentesk8No ratings yet
- Emoving and Installing TurbochargerDocument7 pagesEmoving and Installing TurbochargerDamir MiholićNo ratings yet
- BMQ 30m-Min - 1500mm (SK92172.1AD-IEC71-71LP)Document2 pagesBMQ 30m-Min - 1500mm (SK92172.1AD-IEC71-71LP)YeisonNo ratings yet
- Catalogo MMADocument26 pagesCatalogo MMADomingos BarrosNo ratings yet
- Catalog Ecodan - ATW - 2017 PDFDocument32 pagesCatalog Ecodan - ATW - 2017 PDFDamian OvidiuNo ratings yet
- The New Mercedes Arocs BrochureDocument77 pagesThe New Mercedes Arocs Brochureislamafash100% (1)
- 4 Throttles' Vacuum From Toyota Corolla Levin AE101 4A-GE 20vDocument6 pages4 Throttles' Vacuum From Toyota Corolla Levin AE101 4A-GE 20vTobyNo ratings yet
- EUROPART Inter Catalog Bus Spare Parts 2014-09 EN PDFDocument778 pagesEUROPART Inter Catalog Bus Spare Parts 2014-09 EN PDFludiloliku67% (3)
- Steel Sheet Pile CatalogueDocument80 pagesSteel Sheet Pile CatalogueBrian TanNo ratings yet
- Safe Work Method Statement For Welding of Pipes WPS PQR PDFDocument3 pagesSafe Work Method Statement For Welding of Pipes WPS PQR PDFDeepak RajanNo ratings yet
- Alfa Laval BioPharm Fittings Catalog PDFDocument102 pagesAlfa Laval BioPharm Fittings Catalog PDFcneo59No ratings yet
- Introduction To Risk Based Inspection (RBI)Document7 pagesIntroduction To Risk Based Inspection (RBI)Alejandro LopezNo ratings yet
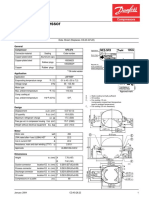
- NF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsDocument2 pagesNF5.5FX Standard Compressor R134a 115-127V 60Hz: CompressorsMiguel CamposNo ratings yet
- 114-3 Unit Assembling Check Sheet KOMATSU ENGINE 114-3-87874Document12 pages114-3 Unit Assembling Check Sheet KOMATSU ENGINE 114-3-87874เชิดศักดิ์ สอาดศรีNo ratings yet
- Mathematical Analysis of The Structure and Performance of An Automated Bread Slicing Machine PDFDocument7 pagesMathematical Analysis of The Structure and Performance of An Automated Bread Slicing Machine PDFIonut DumistrascuNo ratings yet