You might also like
- Iraudamp15: 35W/4 X 2 Channel Class D Audio Power Amplifier Using The IR4311Document13 pagesIraudamp15: 35W/4 X 2 Channel Class D Audio Power Amplifier Using The IR4311Megosah SagemegosNo ratings yet
- Single Power Supply Synchronous PWM Controller: Description FeaturesDocument17 pagesSingle Power Supply Synchronous PWM Controller: Description FeaturesIonel CociasNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- Snva 397 ADocument15 pagesSnva 397 AAriel NavarreteNo ratings yet
- AC Servo System: SDA Series 100W 3.5KWDocument22 pagesAC Servo System: SDA Series 100W 3.5KWSunil Kumar YelisettyNo ratings yet
- Imprimir Datasheet 1Document14 pagesImprimir Datasheet 1Randy Siancas VelezNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- Service Manual: LCD-A2005Document16 pagesService Manual: LCD-A2005Julio Alberto Cabrera RodriguezNo ratings yet
- Correction of Service Manual: Date: Nov. 29,2004 No.: SCH04015 (1/8) Model No. S/M No. PG Model No. S/M No. PGDocument8 pagesCorrection of Service Manual: Date: Nov. 29,2004 No.: SCH04015 (1/8) Model No. S/M No. PG Model No. S/M No. PGmarcellojansen2856No ratings yet
- 32Document3 pages32Tárcio AndréNo ratings yet
- Electronics Soalan Measurement MySkills Akhir 2011Document14 pagesElectronics Soalan Measurement MySkills Akhir 2011Afdzam AzuraNo ratings yet
- Uc284xa Uc384xaDocument16 pagesUc284xa Uc384xayusufwpNo ratings yet
- APxG3 Series General-Purpose Inverter Instruction ManualDocument100 pagesAPxG3 Series General-Purpose Inverter Instruction ManualmichaelsetiawnNo ratings yet
- CCFL Inverter IC OZ960Document12 pagesCCFL Inverter IC OZ960davesworkshopNo ratings yet
- ATV61 Quick Reference GuideDocument2 pagesATV61 Quick Reference GuideEduardo PascualNo ratings yet
- Intelligent CCFL Inverter Controller: FeaturesDocument12 pagesIntelligent CCFL Inverter Controller: FeaturesMirosław DżumakNo ratings yet
- CA3189EDocument8 pagesCA3189EelektrovodaNo ratings yet
- CA12000202-A Pump Starter With ProfibusDocument1 pageCA12000202-A Pump Starter With Profibusnickname12345No ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Isolated Flyback Switching Regulator W - 9V OutputDocument16 pagesIsolated Flyback Switching Regulator W - 9V OutputCasey DialNo ratings yet
- Fet Controller Type 3Ch System Power Supply IcsDocument16 pagesFet Controller Type 3Ch System Power Supply IcsRohit SinghNo ratings yet
- 1035 Mitsubishi M56733afpDocument4 pages1035 Mitsubishi M56733afpHenrique Tannús CarvalhoNo ratings yet
- SC 9711Document14 pagesSC 9711dragon-red0816No ratings yet
- 1565 RTDocument24 pages1565 RTJose Samuel Robelto RNo ratings yet
- Ha 13563Document18 pagesHa 13563Danh ProNo ratings yet
- Circuit Diagram: ModelDocument26 pagesCircuit Diagram: ModelOmar LugoNo ratings yet
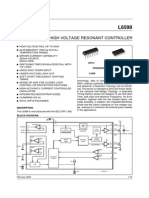
- High Voltage Resonant Controller: DescriptionDocument17 pagesHigh Voltage Resonant Controller: DescriptionJesus SilvaNo ratings yet
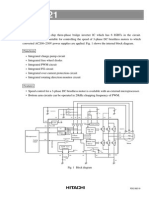
- ATV21 HVAC ShortformV2.1Document4 pagesATV21 HVAC ShortformV2.1Syed Noman AhmedNo ratings yet
- ICL7106, ICL7107, ICL7106S, ICL7107S: 3 / Digit, LCD/LED Display, A/D ConvertersDocument17 pagesICL7106, ICL7107, ICL7106S, ICL7107S: 3 / Digit, LCD/LED Display, A/D ConvertersDave MartzNo ratings yet
- Service Manual Asus Vw224U&Vw224SDocument7 pagesService Manual Asus Vw224U&Vw224SDeki PericNo ratings yet
- 9226X01Document56 pages9226X01buntha_MNo ratings yet
- Ti Digital Motor Control SolutDocument120 pagesTi Digital Motor Control SolutJavier ToscanoNo ratings yet
- UC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllerDocument15 pagesUC2842B/3B/4B/5B UC3842B/3B/4B/5B: High Performance Current Mode PWM ControllertoajuiceNo ratings yet
- DENON AVR 1802 882 Service Manual PDFDocument94 pagesDENON AVR 1802 882 Service Manual PDFatvstereo50% (4)
- CircuitDocument1 pageCircuitShahid Naseem100% (1)
- DAC0808 DatasheetDocument12 pagesDAC0808 DatasheetRicky CoxNo ratings yet
- Altivar 71 Quick Reference Guide - en - T8843pd0601ep r0Document2 pagesAltivar 71 Quick Reference Guide - en - T8843pd0601ep r0محمد دانشNo ratings yet
- PM 150 CSD 120Document7 pagesPM 150 CSD 120elecompinnNo ratings yet
- 7106Document16 pages7106wilsonc97No ratings yet
- VSCTrans MainDocument7 pagesVSCTrans MainSree VidyaNo ratings yet
- Features Description: LTC3810 100V Current Mode Synchronous Switching Regulator ControllerDocument38 pagesFeatures Description: LTC3810 100V Current Mode Synchronous Switching Regulator ControllerCenkGezmişNo ratings yet
- AM5898NDocument11 pagesAM5898NGabriel Cosme VazquezNo ratings yet
- ECN3021Document10 pagesECN3021Wasang Juwi PracihnoNo ratings yet
- Datasheet T2117Document16 pagesDatasheet T2117Radovan RasaNo ratings yet
- Autoestereo Pioneer DEH-4090MP DEH-6010MPDocument39 pagesAutoestereo Pioneer DEH-4090MP DEH-6010MPGustavo De la ONo ratings yet
- FSCQ-Series FSCQ0565RT/FSCQ0765RT/FSCQ0965RT/FSCQ1265RT/ FSCQ1465RT/FSCQ1565RT/FSCQ1565RP Green Mode Fairchild Power Switch (FPS™)Document45 pagesFSCQ-Series FSCQ0565RT/FSCQ0765RT/FSCQ0965RT/FSCQ1265RT/ FSCQ1465RT/FSCQ1565RT/FSCQ1565RP Green Mode Fairchild Power Switch (FPS™)alamgir80100% (2)
- Ane Str3a100Document17 pagesAne Str3a100vietanh_askNo ratings yet
- TC7106/A/TC7107/A: 3-1/2 Digit Analog-to-Digital ConvertersDocument32 pagesTC7106/A/TC7107/A: 3-1/2 Digit Analog-to-Digital ConvertersWai Yan LwinNo ratings yet
- Fan 7313Document11 pagesFan 7313KathafiNo ratings yet
- TOS M087B1 Service ManualDocument11 pagesTOS M087B1 Service ManualEnéas BaroneNo ratings yet
- 3 3/4 Digit Auto DMM with Frequency CounterDocument23 pages3 3/4 Digit Auto DMM with Frequency CounterBluff FlersNo ratings yet
- 6116ASP20Document9 pages6116ASP20BeNz BarrigaNo ratings yet
- Kodak Dryview 6800 LASER IMAGER System Block DiagramDocument4 pagesKodak Dryview 6800 LASER IMAGER System Block DiagramDaiane SantosNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Projectppt 33Document9 pagesProjectppt 33Rajan GuptaNo ratings yet
- Bluetooth Based Home AutomationDocument15 pagesBluetooth Based Home AutomationSiddharth DevNo ratings yet
- Bluetooth Based Home Automation System Using Cell PhoneDocument4 pagesBluetooth Based Home Automation System Using Cell PhonePello OzpNo ratings yet
- Touch Screen Based Speed Control of Single PhaseDocument19 pagesTouch Screen Based Speed Control of Single PhaseRajan GuptaNo ratings yet
- Regulatory Updates on Japan's MO169 Medical Device Quality Management OrdinanceDocument7 pagesRegulatory Updates on Japan's MO169 Medical Device Quality Management OrdinanceHong XuyenNo ratings yet
- Acuson Antares (Printer Installation)Document150 pagesAcuson Antares (Printer Installation)RSX SNo ratings yet
- Cryptography - (1 Ciphers and Fundamentals)Document46 pagesCryptography - (1 Ciphers and Fundamentals)Nichole MilliganNo ratings yet
- S35-625 POWERICA Cummins PDFDocument4 pagesS35-625 POWERICA Cummins PDFramseyNo ratings yet
- Raspberry Pi Based Smart Doorbell System With Advanced Encryption SchemeDocument5 pagesRaspberry Pi Based Smart Doorbell System With Advanced Encryption SchemeFaris MuthoaNo ratings yet
- CE TIME TABLE August 2020 PDFDocument1 pageCE TIME TABLE August 2020 PDFPritam HeikhamNo ratings yet
- How To Create Multiple User Accounts in LinuxDocument2 pagesHow To Create Multiple User Accounts in LinuxAamir MalikNo ratings yet
- E10.01.03.05 Full Options PDFDocument294 pagesE10.01.03.05 Full Options PDFJéssica Ferreira GonçalvesNo ratings yet
- Remote Attestation of Attribute Updates and Information Flows in A UCON SystemDocument16 pagesRemote Attestation of Attribute Updates and Information Flows in A UCON SystemrecluzeNo ratings yet
- Summer Internship Project Report: HR Policies and Placements ATDocument50 pagesSummer Internship Project Report: HR Policies and Placements ATAman RajNo ratings yet
- Advanced HVDC TechnologiesDocument14 pagesAdvanced HVDC TechnologiesS Bharadwaj Reddy100% (1)
- All For Students - HR Interview Questions and Answers For Bank and PSUDocument3 pagesAll For Students - HR Interview Questions and Answers For Bank and PSUMURALINo ratings yet
- Mass AirDocument2 pagesMass AirBoogieNo ratings yet
- Inspection Report No. 73Document3 pagesInspection Report No. 73Rahul MoottolikandyNo ratings yet
- RLNG Pipeline Process ReportDocument9 pagesRLNG Pipeline Process ReportUmair A. KhanNo ratings yet
- Installation UpgradeDocument168 pagesInstallation UpgradeRajNo ratings yet
- Minipack, PS System: Quick Start GuideDocument40 pagesMinipack, PS System: Quick Start GuidemiskoyuNo ratings yet
- SAP ResumeDocument5 pagesSAP ResumeGanesh NewarkarNo ratings yet
- Eeg302 Tut1Document1 pageEeg302 Tut1IsaacOlukunleNo ratings yet
- DataGrokr DevOps Intern Assignment - 20210129Document3 pagesDataGrokr DevOps Intern Assignment - 20210129msdkfhNo ratings yet
- Azhar-Elegant Resume OneDocument6 pagesAzhar-Elegant Resume OneAzhar Ul HaqNo ratings yet
- HA 25.71 Medium Voltage Switchgear NXAIR 2010Document28 pagesHA 25.71 Medium Voltage Switchgear NXAIR 2010Ayman Saber100% (1)
- I.P. Practical FileDocument42 pagesI.P. Practical FileJanmesh SinghNo ratings yet
- Off-Highway Truck: Engine Model Operating SpecificationsDocument28 pagesOff-Highway Truck: Engine Model Operating SpecificationsSandip MaitiNo ratings yet
- SEK SEL 52 37 DatasheetDocument16 pagesSEK SEL 52 37 DatasheetGabriel CarvalhoNo ratings yet
- Fisa Tehnica Centrala Adresabila de Alarmare La Incendiu UTC Fire Security FP1216C-45 2-4 Bucle 128 Adrese-Bucla 16 ZoneDocument2 pagesFisa Tehnica Centrala Adresabila de Alarmare La Incendiu UTC Fire Security FP1216C-45 2-4 Bucle 128 Adrese-Bucla 16 ZoneMariusNo ratings yet
- Weg - Manual Cfw-08Document167 pagesWeg - Manual Cfw-08Jardel100% (6)
- Quotation Kanematsu 2401027784Document3 pagesQuotation Kanematsu 2401027784sofianro.sitepuNo ratings yet
- Robotics 12 00119 v2Document18 pagesRobotics 12 00119 v2Josep Rueda CollellNo ratings yet
- Colour Veil View: A Unique Feature For Sharp's SmartphonesDocument5 pagesColour Veil View: A Unique Feature For Sharp's SmartphonesShahzain QadirNo ratings yet