You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Kinematics of RobotsDocument42 pagesKinematics of RobotsRakeshSainiNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- CASTING-Traditional Manufacturing ProcessesDocument51 pagesCASTING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Fundamentals of RoboticsDocument26 pagesFundamentals of RoboticsRakeshSainiNo ratings yet
- Project On Ac Generator and DC GeneratorDocument17 pagesProject On Ac Generator and DC GeneratorAshutosh Rastogi50% (12)
- Assembly Line BalancingDocument26 pagesAssembly Line BalancingRakeshSaini100% (4)
- Computer Aided ManufacturingDocument72 pagesComputer Aided ManufacturingRakeshSaini100% (1)
- Nonconvergence in Caesar in Caesar IIDocument11 pagesNonconvergence in Caesar in Caesar IIviv0102No ratings yet
- Digital ManufacturingDocument33 pagesDigital ManufacturingRakeshSaini100% (1)
- Optimization Desgin StudyDocument1 pageOptimization Desgin StudyRakeshSainiNo ratings yet
- Follower AssemblyDocument1 pageFollower AssemblyRakeshSainiNo ratings yet
- Engineering Drawing Lab ManualDocument52 pagesEngineering Drawing Lab ManualRakeshSaini83% (6)
- Cam AssemblyDocument1 pageCam AssemblyRakeshSainiNo ratings yet
- Assignment 1: Sbuject: MCTD Last Date: 7/11/2016Document1 pageAssignment 1: Sbuject: MCTD Last Date: 7/11/2016RakeshSainiNo ratings yet
- Robot End EffectorDocument25 pagesRobot End EffectorRakeshSainiNo ratings yet
- Flexible Manufacturing Systems (FMS)Document40 pagesFlexible Manufacturing Systems (FMS)RakeshSaini100% (4)
- MCTD TutorialDocument5 pagesMCTD TutorialRakeshSainiNo ratings yet
- Cam Assignment 1Document2 pagesCam Assignment 1RakeshSainiNo ratings yet
- ProE Lab Work 1 To 11Document11 pagesProE Lab Work 1 To 11RakeshSainiNo ratings yet
- Ultrasonic Machining (USM)Document19 pagesUltrasonic Machining (USM)RakeshSaini100% (2)
- Definition of StressDocument14 pagesDefinition of StressRakeshSainiNo ratings yet
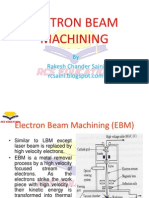
- Electron Beam Machining (EBM)Document8 pagesElectron Beam Machining (EBM)RakeshSaini100% (3)
- FORMING-Traditional Manufacturing ProcessesDocument38 pagesFORMING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Indian AutomobileDocument35 pagesIndian AutomobileRakeshSainiNo ratings yet
- Cellular Manufacturing SystemDocument34 pagesCellular Manufacturing SystemRakeshSainiNo ratings yet
- CNCDocument43 pagesCNCRakeshSainiNo ratings yet
- Nontraditional Manufacturing ProcessDocument57 pagesNontraditional Manufacturing ProcessRakeshSainiNo ratings yet
- Personnel ManagementDocument10 pagesPersonnel ManagementRakeshSainiNo ratings yet
- Introdution CAD/CAMDocument27 pagesIntrodution CAD/CAMRakeshSainiNo ratings yet
- SHEET METAL PROCESSING-Traditional Manufacturing ProcessesDocument14 pagesSHEET METAL PROCESSING-Traditional Manufacturing ProcessesRakeshSainiNo ratings yet
- Traction Control SystemDocument24 pagesTraction Control SystemRakeshSaini100% (1)
- TEFELEN Technical Product CatalogueDocument16 pagesTEFELEN Technical Product CatalogueDiego MantillaNo ratings yet
- Spillway DesignDocument6 pagesSpillway DesignguildkeyNo ratings yet
- Semiconductors Module 07Document10 pagesSemiconductors Module 07AliNo ratings yet
- PDFDocument16 pagesPDFOsanebi Chukwudi Lucky0% (1)
- Cambridge International AS & A Level: PHYSICS 9702/22Document20 pagesCambridge International AS & A Level: PHYSICS 9702/22Pham Thanh MinhNo ratings yet
- 1.1.1.4 Worksheet - Ohms LawDocument1 page1.1.1.4 Worksheet - Ohms LawPirate Spice100% (2)
- OTC 4134 Collisions Between Ships and Offshore PlatformsDocument9 pagesOTC 4134 Collisions Between Ships and Offshore PlatformsRaghu MahadevappaNo ratings yet
- Newton and The Mechanical Philosophy PDFDocument19 pagesNewton and The Mechanical Philosophy PDFdavid199415No ratings yet
- Science8 Q1 Wk3Document6 pagesScience8 Q1 Wk3Aizelle Taratara FaderoNo ratings yet
- Test 4 Review SolutionsDocument13 pagesTest 4 Review SolutionsFabio Suta ArandiaNo ratings yet
- Relay Selection GuideDocument1 pageRelay Selection GuidePrateek JainNo ratings yet
- RM35TF30Document96 pagesRM35TF30Hossein Jalali MoghaddamNo ratings yet
- Closed Loop Control of Hexagram Inverter: G.Renukadevi, K.RajambalDocument8 pagesClosed Loop Control of Hexagram Inverter: G.Renukadevi, K.Rajambalrenunila100% (1)
- Magnetic Amplifier in Series: Operation ManualDocument6 pagesMagnetic Amplifier in Series: Operation Manualnved01No ratings yet
- Filling Some Gaps in Spline Design Guidelines - Centering-Friction-and-misalignementDocument8 pagesFilling Some Gaps in Spline Design Guidelines - Centering-Friction-and-misalignementthisisjineshNo ratings yet
- Lorentz Force Sigmometry: A Contactless Method For Electrical Conductivity MeasurementsDocument8 pagesLorentz Force Sigmometry: A Contactless Method For Electrical Conductivity MeasurementsAnnisa Syahida KhakimNo ratings yet
- Old Enthuse Phase 1Document92 pagesOld Enthuse Phase 1bhooshan japeNo ratings yet
- Elpro 23bpt GBDocument6 pagesElpro 23bpt GBTerryAdamsNo ratings yet
- WPH02 01 Que 20180118 2 PDFDocument28 pagesWPH02 01 Que 20180118 2 PDFOmar HashemNo ratings yet
- Experiment V - Viscosity of Oil by The Rotating Cylinder MethodDocument16 pagesExperiment V - Viscosity of Oil by The Rotating Cylinder MethodMaciej WędrychowiczNo ratings yet
- Sizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDocument7 pagesSizing of DG Unit To Reduce Losses in Radial Distribution - A Case StudyDizky Christian HadiNo ratings yet
- Fluid Mechanics Chapter 6Document34 pagesFluid Mechanics Chapter 6Ricky Mak100% (1)
- A37 Four Point Probe Measurement of Semiconductor Sheet ResistanceDocument2 pagesA37 Four Point Probe Measurement of Semiconductor Sheet ResistanceRamu NelapatiNo ratings yet
- Battery TenderDocument2 pagesBattery TenderEduardo VicoNo ratings yet
- Regulation: 2018 Formative Assessment I - May 2020 III Semester 18MC302Document2 pagesRegulation: 2018 Formative Assessment I - May 2020 III Semester 18MC302sivaeeinfoNo ratings yet
- Physics 20 Unit C: Energy, Work and Circular MotionDocument1 pagePhysics 20 Unit C: Energy, Work and Circular MotionUnzal FatehullahNo ratings yet
- AN4971Document19 pagesAN4971mohammad dolatshahiNo ratings yet
- Torque Production in Permanent-MagnetDocument6 pagesTorque Production in Permanent-MagnetTien Dung TranNo ratings yet