You might also like
- Project Report On Pick and Place Robot (By Chirag Joshi)Document37 pagesProject Report On Pick and Place Robot (By Chirag Joshi)Chirag85% (41)
- Robot Project Report RoboticsDocument34 pagesRobot Project Report Roboticsdcrust_amit82% (11)
- Big Data and Mobility as a ServiceFrom EverandBig Data and Mobility as a ServiceHaoran ZhangNo ratings yet
- Chap 4 PDFDocument35 pagesChap 4 PDFKamarul Nizam100% (1)
- Modular Armed Advanced Robotic System 2018 - 19Document56 pagesModular Armed Advanced Robotic System 2018 - 19neweraNo ratings yet
- 7th Sense Multipurpose RobotDocument50 pages7th Sense Multipurpose Robotashok3manjuNo ratings yet
- BE Sem VII Project Cleaning RobotDocument29 pagesBE Sem VII Project Cleaning RobotNATTIVE INDIANNo ratings yet
- Robot Thesis IdeasDocument7 pagesRobot Thesis Ideasjessicamyerseugene100% (2)
- ENGT5256 Robotics - 20-21 - CourseworkDocument8 pagesENGT5256 Robotics - 20-21 - CourseworkAYOMIDENo ratings yet
- Third Eye Rescue Robot Project for Disaster ReliefDocument10 pagesThird Eye Rescue Robot Project for Disaster Reliefanurag6866No ratings yet
- Pick and Place Robot Literature ReviewDocument8 pagesPick and Place Robot Literature Reviewnydohavihup2100% (1)
- IOT Based Colour Skittle Sorting MachineDocument22 pagesIOT Based Colour Skittle Sorting MachineAbhishek MohiteNo ratings yet
- Robotics Thesis ProjectDocument7 pagesRobotics Thesis Projectgjh9pq2a100% (1)
- I-Android: Line Following RobotDocument72 pagesI-Android: Line Following RobotajachurailNo ratings yet
- Major ProjectDocument21 pagesMajor ProjectChitra OberoyNo ratings yet
- HUMAN DocumentationDocument20 pagesHUMAN DocumentationJayanth ReddyNo ratings yet
- Computer-Operated Wireless Robot Project ReportDocument46 pagesComputer-Operated Wireless Robot Project ReportMîräl H PàtélNo ratings yet
- RoboticsDocument120 pagesRoboticsmivanoNo ratings yet
- A Project Report: 1.amarsinh Dhepe 2.rohit Gadhave 3.ashok ChavhanDocument26 pagesA Project Report: 1.amarsinh Dhepe 2.rohit Gadhave 3.ashok ChavhanG GoreNo ratings yet
- Automation of Floor Cleaning RobotDocument6 pagesAutomation of Floor Cleaning RobotIJRASETPublicationsNo ratings yet
- Color Based Object Sorting Robot Development: A ReviewDocument4 pagesColor Based Object Sorting Robot Development: A ReviewIJRASETPublications100% (1)
- Line FollowerDocument47 pagesLine Followeryogi6804No ratings yet
- Ravi Teja Internship ReportDocument9 pagesRavi Teja Internship ReportRavi TejaNo ratings yet
- Shivam Seminar ReportDocument21 pagesShivam Seminar ReportRuhal VipinNo ratings yet
- Automated Line Follower RoboDocument18 pagesAutomated Line Follower RoboAnurag KumarNo ratings yet
- Government Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDocument15 pagesGovernment Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDev MaratheNo ratings yet
- Overview of The Internet of Things (Iots) : Spring 2013 Qian Zhang Fytgs, HkustDocument56 pagesOverview of The Internet of Things (Iots) : Spring 2013 Qian Zhang Fytgs, Hkustsmishra2222No ratings yet
- Industrial Robotic Arm Report SummaryDocument19 pagesIndustrial Robotic Arm Report SummaryKshitij BandarNo ratings yet
- Line Following Robot ResearchDocument4 pagesLine Following Robot ResearchtherealslimNo ratings yet
- Applications of Industrial RobotsDocument66 pagesApplications of Industrial RobotsJag Parvesh DahiyaNo ratings yet
- Final ReportDocument28 pagesFinal ReportAmal RasheedNo ratings yet
- Wireless Surveillance Robot With Motion Detection and Live Video TransmissionDocument9 pagesWireless Surveillance Robot With Motion Detection and Live Video TransmissionrajatpreetNo ratings yet
- Human Computer CommunicationDocument25 pagesHuman Computer CommunicationNguyễn Thị Mỹ HânNo ratings yet
- LFR ReportDocument91 pagesLFR ReportRahul Salim NarayananNo ratings yet
- Bluetooth Control Pick and Place Robot Using Arduino IJERTCONV10IS11043Document3 pagesBluetooth Control Pick and Place Robot Using Arduino IJERTCONV10IS11043Ernest ChiwaleNo ratings yet
- PLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyDocument5 pagesPLC Based Pick and Place Robot With 4 DOF: Nternational Ournal of Nnovative Esearch in Cience, Ngineering and EchnologyGS AshishNo ratings yet
- Water Level Indicator and Controller Project ReportDocument14 pagesWater Level Indicator and Controller Project ReportDivyansh MathurNo ratings yet
- Obstacle Avoiding Robot 1920Document13 pagesObstacle Avoiding Robot 1920Abhishek ViraleNo ratings yet
- Pick and Place Robotic Arm Implementation Using ArduinoDocument9 pagesPick and Place Robotic Arm Implementation Using Arduinodhinesh dinsNo ratings yet
- Free PPT Templates: Insert The Title of Your Presentation HereDocument12 pagesFree PPT Templates: Insert The Title of Your Presentation HereK B AbhishekNo ratings yet
- Sensor Based Color Identification Robot For Type Casting: Toufeeq AhmadDocument6 pagesSensor Based Color Identification Robot For Type Casting: Toufeeq AhmadNeil PowellNo ratings yet
- Pick and Place Arm Movement Control by AndroidDocument61 pagesPick and Place Arm Movement Control by Androidnagaraju75% (4)
- Microcontroller Line Follower RobotDocument5 pagesMicrocontroller Line Follower RobotKimiNo ratings yet
- Manoharbhai Patel Institute of Engineering and Technology, GondiaDocument20 pagesManoharbhai Patel Institute of Engineering and Technology, GondiaRavi JoshiNo ratings yet
- Obstacle Avoiding RobotDocument24 pagesObstacle Avoiding Robotmkafle101No ratings yet
- Synopsis On Pick Place Report .Document6 pagesSynopsis On Pick Place Report .yrikkiNo ratings yet
- Wireless Control of Pick and Place Robotic Arm Using An Android ApplicationDocument7 pagesWireless Control of Pick and Place Robotic Arm Using An Android ApplicationChandan Kumar SharmaNo ratings yet
- Ambient Assistive Navigator GreenDocument25 pagesAmbient Assistive Navigator Greens021No ratings yet
- Chapter1N - Robot Introduction (2015) PDFDocument55 pagesChapter1N - Robot Introduction (2015) PDFAZA14No ratings yet
- Pick and Place Robotic Arm Using Arduino: December 2017Document7 pagesPick and Place Robotic Arm Using Arduino: December 2017visionNo ratings yet
- Pick & Place Robot Arm ControlDocument14 pagesPick & Place Robot Arm ControlAkshay byp100% (1)
- Robotics (1207415)Document13 pagesRobotics (1207415)Vinit SalujaNo ratings yet
- Research Paper On Fractal RobotsDocument5 pagesResearch Paper On Fractal Robotsxwrcmecnd100% (3)
- The Book Store Manegement: A Mini Project ReportDocument24 pagesThe Book Store Manegement: A Mini Project ReportShubham SinghNo ratings yet
- An Environment Friendly Autonomous ATV - Practical Mechatronic ProjectDocument4 pagesAn Environment Friendly Autonomous ATV - Practical Mechatronic ProjectDaniel OliveiraNo ratings yet
- Advanced Automation Techniques in Adaptive by Xiaoqi Chen and Rajagopalan Devanathan, Aik Meng Fong.Document321 pagesAdvanced Automation Techniques in Adaptive by Xiaoqi Chen and Rajagopalan Devanathan, Aik Meng Fong.ismailNo ratings yet
- Line Follower Robot ThesisDocument5 pagesLine Follower Robot Thesisafktciaihzjfyr100% (1)
- Practical, Made Easy Guide To Robotics & Automation [Revised Edition]From EverandPractical, Made Easy Guide To Robotics & Automation [Revised Edition]Rating: 1 out of 5 stars1/5 (1)
- Mechatronic Components: Roadmap to DesignFrom EverandMechatronic Components: Roadmap to DesignRating: 5 out of 5 stars5/5 (1)
- Gis 145kv 4Document18 pagesGis 145kv 4tafseerahmedNo ratings yet
- Anchorage To Concrete - Means and MethodsDocument28 pagesAnchorage To Concrete - Means and MethodsMustafaNo ratings yet
- Liberty Galati S.A. - Romania: Inspection Certificate 20614009 ACCORDING TO: EN 10204/2004/3.1 DATE: 20.01.2020Document1 pageLiberty Galati S.A. - Romania: Inspection Certificate 20614009 ACCORDING TO: EN 10204/2004/3.1 DATE: 20.01.2020Felicia CioabaNo ratings yet
- 7.1 Cement MFG - R1617.1Document22 pages7.1 Cement MFG - R1617.1arsenic_94No ratings yet
- S275JRDocument1 pageS275JRShahzad QamarNo ratings yet
- Engineering Deliverables ListDocument49 pagesEngineering Deliverables ListpavanNo ratings yet
- Vibro CompactionDocument2 pagesVibro CompactionVpln SarmaNo ratings yet
- Hydrogen-Bonded Supramolecular Liquid Crystal Polymers: Smart Materials With Stimuli-Responsive, Self-Healing, and Recyclable PropertiesDocument30 pagesHydrogen-Bonded Supramolecular Liquid Crystal Polymers: Smart Materials With Stimuli-Responsive, Self-Healing, and Recyclable PropertiesNadi NaderiNo ratings yet
- Chemical Supplies Company ListingDocument757 pagesChemical Supplies Company ListingAmit Jage50% (4)
- Katherine Davis, Gary Eddy, Alex Johannigman, Nathan ValdezDocument1 pageKatherine Davis, Gary Eddy, Alex Johannigman, Nathan Valdezanon_760617705No ratings yet
- Exploration GeologyDocument36 pagesExploration Geologyفردوس سليمانNo ratings yet
- Busines Proposal For Residential ConstructionDocument7 pagesBusines Proposal For Residential ConstructionNatsu Trojanlee QuiritNo ratings yet
- Steel Coil AlignmentDocument1 pageSteel Coil AlignmentBalluff SensorsNo ratings yet
- Waterjet Cutting Systems: A Versatile Cutting ProcessDocument2 pagesWaterjet Cutting Systems: A Versatile Cutting ProcessRamin SobatiNo ratings yet
- DistillationDocument15 pagesDistillationRahul PalsNo ratings yet
- PivsuexDocument7 pagesPivsuextthenryNo ratings yet
- SAB Flexible Cables C1Document20 pagesSAB Flexible Cables C1Carlos OzaetaNo ratings yet
- Effectivity of Cellophanes As Alternative of Commercialized FloorwaxDocument14 pagesEffectivity of Cellophanes As Alternative of Commercialized FloorwaxFranzes Mar Eria100% (1)
- Sludge ThickeningDocument33 pagesSludge ThickeningKharisma Natalia100% (1)
- KLINGER AUSTRALIA BrochureDocument8 pagesKLINGER AUSTRALIA BrochureMichael PhamNo ratings yet
- Anchored Brick Veneer Over Steel Studs PDFDocument56 pagesAnchored Brick Veneer Over Steel Studs PDFaomareltayeb100% (1)
- Siemens Syngas Capable TurbinesDocument8 pagesSiemens Syngas Capable TurbinesAlasdair McLeodNo ratings yet
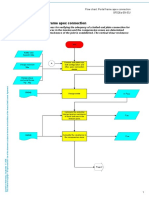
- SF026a-Flow Chart Portal Frame Apex ConnectionDocument3 pagesSF026a-Flow Chart Portal Frame Apex ConnectiondvelchevNo ratings yet
- Prelis 2012 MK en BRDocument9 pagesPrelis 2012 MK en BRDana LoreNo ratings yet
- Ch04Document20 pagesCh04nilesh0074313No ratings yet
- Clivet Toplotne PumpeDocument15 pagesClivet Toplotne PumpeSean ThomasNo ratings yet
- Webasto Heater Remote Control: Here Is The Climate Control Unit J255 That Is Going To Be ModifiedDocument8 pagesWebasto Heater Remote Control: Here Is The Climate Control Unit J255 That Is Going To Be ModifiedAlexanderNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- Milling Concept MILL 450 enDocument6 pagesMilling Concept MILL 450 enHeineken Ya PraneetpongrungNo ratings yet


























































![Practical, Made Easy Guide To Robotics & Automation [Revised Edition]](https://imgv2-2-f.scribdassets.com/img/word_document/253466853/149x198/4281882d40/1709916831?v=1)