You might also like
- For CARBON MONOXIDE (CO) and Methane Detection General InformationDocument3 pagesFor CARBON MONOXIDE (CO) and Methane Detection General InformationFarshad yazdi100% (1)
- MQ307ADocument2 pagesMQ307AFarshad yazdiNo ratings yet
- MQ 216Document2 pagesMQ 216Farshad yazdiNo ratings yet
- Datasheet Sensor MQ9Document3 pagesDatasheet Sensor MQ9Harold CaraballoNo ratings yet
- MicroNote Series 201Document2 pagesMicroNote Series 201Farshad yazdiNo ratings yet
- MQ 6Document2 pagesMQ 6api-3850017No ratings yet
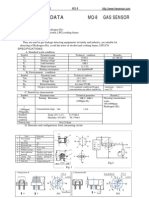
- MQ 4Document2 pagesMQ 4api-3850017100% (1)
- MQ306ADocument2 pagesMQ306AFarshad yazdiNo ratings yet
- MQ 214Document2 pagesMQ 214api-3850017100% (1)
- MQ 8Document2 pagesMQ 8Farshad yazdiNo ratings yet
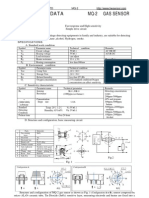
- MQ 2Document2 pagesMQ 2api-3850017100% (1)
- Micro-Notes 401 Diodo Schottky PDFDocument2 pagesMicro-Notes 401 Diodo Schottky PDFElectricEngineeringNo ratings yet
- Technical Data Mq-7 Gas Sensor: FeaturesDocument3 pagesTechnical Data Mq-7 Gas Sensor: FeaturesFarshad yazdiNo ratings yet
- MQ 3Document2 pagesMQ 3Farshad yazdiNo ratings yet
- MQ 5Document2 pagesMQ 5api-3850017100% (2)
- Driver RelayDocument2 pagesDriver Relaysandi sukma100% (1)
- Electus Distribution Reference Data Sheet: POLYMOVS PDFDocument2 pagesElectus Distribution Reference Data Sheet: POLYMOVS PDFFarshad yazdi100% (2)
- Electus Distribution Reference Data Sheet: RESCODE PDFDocument2 pagesElectus Distribution Reference Data Sheet: RESCODE PDFFarshad yazdi100% (2)
- Variable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFDocument3 pagesVariable Resistors or Pots : Electus Distribution Reference Data Sheet: POTPRIMR PDFmuta'alimNo ratings yet
- Led LaserDocument3 pagesLed LaserPayal SinghalNo ratings yet
- CcoptDocument3 pagesCcoptMidhun VargheseNo ratings yet
- Electus Distribution Reference Data Sheet: POLYMOVS PDFDocument2 pagesElectus Distribution Reference Data Sheet: POLYMOVS PDFFarshad yazdi100% (2)
- LCD InterfaceDocument4 pagesLCD InterfaceFarshad yazdi100% (2)
- Semiconductor Application NoteDocument10 pagesSemiconductor Application NoteFarshad yazdi100% (2)
- Harmonic Filter Calculation SpreadsheetDocument2 pagesHarmonic Filter Calculation SpreadsheetFarshad yazdi100% (2)
- Electus Distribution Reference Data Sheet: FUSEPRMR PDFDocument2 pagesElectus Distribution Reference Data Sheet: FUSEPRMR PDFFarshad yazdiNo ratings yet
- Impedance Matching 2Document3 pagesImpedance Matching 2Madhavesh KulkarniNo ratings yet
- Hum LoopDocument3 pagesHum Loopapi-3716544100% (2)
- Electus Distribution Reference Data Sheet: FERRITES PDFDocument3 pagesElectus Distribution Reference Data Sheet: FERRITES PDFFarshad yazdi100% (2)
- Harmonic Filter CalculationsDocument1 pageHarmonic Filter CalculationsFarshad yazdi100% (3)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Tunnel DiodeDocument5 pagesTunnel DiodeVaughan PngNo ratings yet
- Schaum's OutlinesDocument4 pagesSchaum's OutlinesSer John Lynon Perez100% (1)
- STATE COMMON ENTRANCE TEST CELL, Maharashtra Cut Off List for Engineering Admission 2016-17Document735 pagesSTATE COMMON ENTRANCE TEST CELL, Maharashtra Cut Off List for Engineering Admission 2016-17Shree Ramchandra College of Engineering, Pune SRESNo ratings yet
- Automation TrainingDocument4 pagesAutomation Trainingshaleenm_2No ratings yet
- Untitled HHH HHHDocument12 pagesUntitled HHH HHHWamema joshuaNo ratings yet
- BQ Barrier GateDocument2 pagesBQ Barrier GatenanubmatNo ratings yet
- Power Distribution and UtilizationDocument5 pagesPower Distribution and UtilizationSmrah ImtiazNo ratings yet
- DG-BG4300NU (HW Ver.B2) : 3G/4G USB Modem Compatibility ListDocument3 pagesDG-BG4300NU (HW Ver.B2) : 3G/4G USB Modem Compatibility ListrskcadNo ratings yet
- CrumProg EngDocument59 pagesCrumProg Engพ่อโกรธ พ่อต้องยิ้มNo ratings yet
- PHD Thesis Completed As at 15 Sept 2009Document25 pagesPHD Thesis Completed As at 15 Sept 2009lathamercyNo ratings yet
- CCTV Product: Dahua TechnologyDocument61 pagesCCTV Product: Dahua TechnologyAnisa SyakilaNo ratings yet
- ISA BUS RaporuDocument10 pagesISA BUS Raporuravi02431No ratings yet
- RC65X RemoteDocument60 pagesRC65X RemoteKevNo ratings yet
- DVR User ManualDocument112 pagesDVR User Manualbimbom47No ratings yet
- Manual Zeno 5Document172 pagesManual Zeno 5GIS ScienceNo ratings yet
- Troubleshooting Guide Version 1Document13 pagesTroubleshooting Guide Version 1Rv SalazarNo ratings yet
- What Is RTN/Microwave TechnologyDocument27 pagesWhat Is RTN/Microwave TechnologyRavan AllahverdiyevNo ratings yet
- Vlsi Design (Wires & Vias)Document21 pagesVlsi Design (Wires & Vias)Ashish Verma100% (1)
- Partes Crown AudioDocument78 pagesPartes Crown AudioFlorentino TorresNo ratings yet
- Designing With Zynq Ultrascale+ RfsocDocument2 pagesDesigning With Zynq Ultrascale+ Rfsocparsu2kNo ratings yet
- Quectel M72 Hardware Design V4.1Document66 pagesQuectel M72 Hardware Design V4.1Igor VukomanovicNo ratings yet
- Col85 Series, Col811 Series: 800 MHZ Meander CollinearDocument2 pagesCol85 Series, Col811 Series: 800 MHZ Meander CollinearNazario M0renoNo ratings yet
- Etextbook 978 0132988636 Electronic Communications A System ApproachDocument61 pagesEtextbook 978 0132988636 Electronic Communications A System Approachlee.ortiz429100% (45)
- 2 Address DecoderDocument18 pages2 Address DecoderSyarif Koto0% (1)
- Instructions and Advices To Use The Electronic Controller Logik 25-SDocument23 pagesInstructions and Advices To Use The Electronic Controller Logik 25-SsebastianNo ratings yet
- Ec2352 Computer Networks Question BankDocument5 pagesEc2352 Computer Networks Question BankVignesh SelvamNo ratings yet
- BW08C User ManualDocument12 pagesBW08C User Manualj r velasquezNo ratings yet
- High PassDocument2 pagesHigh PassMamoon BarbhuyanNo ratings yet
- Shad Ibne MuazDocument4 pagesShad Ibne Muazসাদ ইবনে মাজNo ratings yet
- Mircom TX3-CX-2K-A Data SheetDocument4 pagesMircom TX3-CX-2K-A Data SheetJMAC SupplyNo ratings yet