You might also like
- DC-DC ConverterDocument24 pagesDC-DC ConverterkandularanjithNo ratings yet
- ECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersDocument60 pagesECE 8830 - Electric Drives: Topic 9: Current-Fed InvertersKelvin LiewNo ratings yet
- Unified Power Flow Controller Technology and ApplicationFrom EverandUnified Power Flow Controller Technology and ApplicationRating: 4 out of 5 stars4/5 (5)
- 23 04 10 Electronic Variable Speed DrivesDocument7 pages23 04 10 Electronic Variable Speed Drivesyxp2237No ratings yet
- Electric Drive Course OutcomesDocument9 pagesElectric Drive Course OutcomesAbhíñåv PrâjãpätîNo ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Universal Motors: Presented by Meraj WarsiDocument13 pagesUniversal Motors: Presented by Meraj WarsiMeraj WarsiNo ratings yet
- Induction MotorsDocument81 pagesInduction MotorsIdhamtanahbaruNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Aed Unit3Document68 pagesAed Unit3Anser Pasha100% (1)
- Induction Type Relay GuideDocument14 pagesInduction Type Relay GuideAnilNo ratings yet
- Understand How Three Phase Induction Motors WorkDocument86 pagesUnderstand How Three Phase Induction Motors WorkSelva SamNo ratings yet
- 17ee82 - Ida - Mod 3 NotesDocument38 pages17ee82 - Ida - Mod 3 NotesManish Kumar SahaniNo ratings yet
- DC M&T - Lecture - Notes PDFDocument138 pagesDC M&T - Lecture - Notes PDFTridasha AithalNo ratings yet
- DC Machine MaintenanceDocument5 pagesDC Machine MaintenancejmsangriaNo ratings yet
- VFD Harmonic MitigationDocument17 pagesVFD Harmonic Mitigationbirmaduu100% (1)
- Induction Generator Starting MethodsDocument5 pagesInduction Generator Starting MethodsChathuranga NagasingheNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- Power Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesFrom EverandPower Quality in Power Systems, Electrical Machines, and Power-Electronic DrivesNo ratings yet
- Synchronous Machine DesignDocument35 pagesSynchronous Machine DesignvietnhuNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- T60 741x AE1Document694 pagesT60 741x AE1kumarinelNo ratings yet
- CYCLOCONVERTERSDocument46 pagesCYCLOCONVERTERSHari Haran100% (1)
- Variable Speed Drive - IntroductionDocument6 pagesVariable Speed Drive - Introductionawhk2006No ratings yet
- E M 1 Lab ManualDocument63 pagesE M 1 Lab ManualdsparanthamanNo ratings yet
- Chapter 8-Vector Control of Induction Motors PDFDocument18 pagesChapter 8-Vector Control of Induction Motors PDFŞehriban YalçınNo ratings yet
- Cuk, Sepic Zeta NptelDocument20 pagesCuk, Sepic Zeta NptelAvinash Babu KmNo ratings yet
- MJR ppt-1Document15 pagesMJR ppt-1teslaNo ratings yet
- Rating of The Circuit BreakersDocument19 pagesRating of The Circuit BreakersRoopa ReddyNo ratings yet
- Course Outline: 1. Introduction To WECC 2. Fundamentals of ElectricityDocument51 pagesCourse Outline: 1. Introduction To WECC 2. Fundamentals of ElectricityWoldemariam WorkuNo ratings yet
- Distributed Generation With ATP EMTP PDFDocument6 pagesDistributed Generation With ATP EMTP PDFCarlos Lino Rojas AgüeroNo ratings yet
- Ps2113 Distributed Generation and Microgrid 2013 14Document2 pagesPs2113 Distributed Generation and Microgrid 2013 14Eric Hernandez0% (1)
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- Synchronous GeneratorsDocument17 pagesSynchronous GeneratorsAman AnsariNo ratings yet
- Understanding Input Harmonics Mitigation TechniquesDocument55 pagesUnderstanding Input Harmonics Mitigation TechniquesRyan JayNo ratings yet
- EE 442 642 IntroductionDocument14 pagesEE 442 642 IntroductionUSERNAME12340987No ratings yet
- Step and touch potential hazards reducedDocument6 pagesStep and touch potential hazards reducedPURABI DEYNo ratings yet
- Unit 2 Electromagnetic Relays (Switchgear and Protection)Document91 pagesUnit 2 Electromagnetic Relays (Switchgear and Protection)sujithNo ratings yet
- IDA - QuesbankDocument10 pagesIDA - QuesbankKavitha KaviNo ratings yet
- CMR Institute of Technology, Bangalore: Link To Detailed SyllabusDocument6 pagesCMR Institute of Technology, Bangalore: Link To Detailed SyllabusChithra Manivelan0% (1)
- Machies Singly ExcitedDocument15 pagesMachies Singly ExcitedMohamed ElfekyNo ratings yet
- Induction Motor BrakingDocument26 pagesInduction Motor BrakingAshwini Singh100% (3)
- EEE NT VivaDocument12 pagesEEE NT VivaAyyappa Javangula100% (2)
- Eee-Vi-switchgear & Protection (10ee62) - NotesDocument93 pagesEee-Vi-switchgear & Protection (10ee62) - NotesVinoth Kumar0% (1)
- Experiment 4 - Three Phase Uncontrolled RectifierDocument13 pagesExperiment 4 - Three Phase Uncontrolled RectifierAaaa DdddNo ratings yet
- No Load Test: ObjectiveDocument5 pagesNo Load Test: ObjectiveyashNo ratings yet
- Electric DrivesDocument2 pagesElectric DrivesnikunjNo ratings yet
- Filter DesignDocument6 pagesFilter Designnaga7389No ratings yet
- Control in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977From EverandControl in Power Electronics and Electrical Drives: Proceedings of the Second IFAC Symposium, Düsseldorf, Federal Republic of Germany, 3 – 5 October 1977W. LeonhardNo ratings yet
- University Institute of Engineering Department Au-1Document40 pagesUniversity Institute of Engineering Department Au-1Manveer SinghNo ratings yet
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- Synchronous Generator Operating ChartDocument4 pagesSynchronous Generator Operating Chartp41005679No ratings yet
- Seven APF PDFDocument8 pagesSeven APF PDFsureshy-ee213No ratings yet
- Seven Level Shunt Active Filter PDFDocument8 pagesSeven Level Shunt Active Filter PDFsureshy-ee213No ratings yet
- Adjustable Speed Drives TutorialDocument13 pagesAdjustable Speed Drives Tutorialapi-3765150100% (2)
- Differentiator AdditonalDocument16 pagesDifferentiator Additonalsureshy-ee213No ratings yet
- Seven-Level Shunt Active Power Filter For High-Power Drive SystemsDocument8 pagesSeven-Level Shunt Active Power Filter For High-Power Drive SystemsDivya KoundinyaNo ratings yet
- Phase Locked LoopsDocument82 pagesPhase Locked Loopssureshy-ee213No ratings yet
- MLI ToplogiesDocument10 pagesMLI Toplogiessureshy-ee213No ratings yet
- Control of SingleStage GridDocument6 pagesControl of SingleStage Gridsureshy-ee213No ratings yet
- EC HandbookDocument10 pagesEC HandbookRitwik Kumar0% (2)
- EC Handbook - 2017 PDFDocument10 pagesEC Handbook - 2017 PDFsureshy-ee2130% (1)
- CH 6 - Voltage Regulator PDFDocument46 pagesCH 6 - Voltage Regulator PDFsureshy-ee213No ratings yet
- Nadi Astrology and Proff..Document75 pagesNadi Astrology and Proff..sureshy-ee213100% (3)
- MT 086Document10 pagesMT 086Muhammad IkhsanNo ratings yet
- 250 Mid CapsDocument26 pages250 Mid Capssureshy-ee213No ratings yet
- Optimized Harmonic Stepped-Waveform for Multilevel Inverters (OHSWDocument26 pagesOptimized Harmonic Stepped-Waveform for Multilevel Inverters (OHSWsureshy-ee213No ratings yet
- Phase Shifted PWMDocument6 pagesPhase Shifted PWMsureshy-ee213No ratings yet
- Optimized Harmonic Stepped-Waveform for Multilevel Inverters (OHSWDocument26 pagesOptimized Harmonic Stepped-Waveform for Multilevel Inverters (OHSWsureshy-ee213No ratings yet
- PDFDocument8 pagesPDFsureshy-ee213No ratings yet
- Basic Electric Circuits: Introduction To Operational AmplifiersDocument37 pagesBasic Electric Circuits: Introduction To Operational Amplifierssureshy-ee213No ratings yet
- Lecture14 OP AmpsDocument61 pagesLecture14 OP AmpsmisaNo ratings yet
- Lecture14 OP AmpsDocument61 pagesLecture14 OP AmpsmisaNo ratings yet
- LicDocument123 pagesLicsureshy-ee213No ratings yet
- 1 - Characterization of OpampDocument4 pages1 - Characterization of Opampsureshy-ee213No ratings yet
- Anlog CircuitsDocument1 pageAnlog Circuitssureshy-ee213No ratings yet
- Basic Electric Circuits: Introduction To Operational AmplifiersDocument37 pagesBasic Electric Circuits: Introduction To Operational Amplifierssureshy-ee213No ratings yet
- HZ Power System: Power Converter Aiid Transmission LinesDocument8 pagesHZ Power System: Power Converter Aiid Transmission Linessureshy-ee213No ratings yet
- BJT Load LineDocument4 pagesBJT Load Linesureshy-ee213No ratings yet
- Study OpAmp Inverting & Noninverting Amplifiers, Plot Gain vs FrequencyDocument5 pagesStudy OpAmp Inverting & Noninverting Amplifiers, Plot Gain vs Frequencysureshy-ee213No ratings yet
- Technical astrological terms and planetary characteristics explainedDocument45 pagesTechnical astrological terms and planetary characteristics explainedBegwani RishabhNo ratings yet
- PDFDocument7 pagesPDFsureshy-ee213No ratings yet
- RESPONDALIGHT Product Guide 2010Document12 pagesRESPONDALIGHT Product Guide 2010steve9581No ratings yet
- Mercury Mercruiser #24 - Marine Engines GM V-8 305 CID (5.0L) - 1Document189 pagesMercury Mercruiser #24 - Marine Engines GM V-8 305 CID (5.0L) - 1薛泽绵No ratings yet
- MTN Hybrid power system installation and SWAP guideDocument41 pagesMTN Hybrid power system installation and SWAP guideErin Peter Tai100% (1)
- Busbar ProtectionDocument16 pagesBusbar ProtectionDEADMANNo ratings yet
- Subaru Impreza Wiring Diagram PDFDocument66 pagesSubaru Impreza Wiring Diagram PDFlostris23462% (13)
- Uf 1002 FDocument3 pagesUf 1002 FJose M PeresNo ratings yet
- D2 Electrical LibraryDocument728 pagesD2 Electrical Librarydev modemNo ratings yet
- BevAir WTR27A Refrigerator ManualDocument11 pagesBevAir WTR27A Refrigerator ManualplainmanNo ratings yet
- Group 00E: Harness Connector INSPECTION - . - . - . - . - . - . - . - . - . - How To Diagnose. - . - . - . - . - . .Document16 pagesGroup 00E: Harness Connector INSPECTION - . - . - . - . - . - . - . - . - . - How To Diagnose. - . - . - . - . - . .Art Del R SalongaNo ratings yet
- Power Metal Fixed Resistors: FeaturesDocument2 pagesPower Metal Fixed Resistors: FeaturesMiguel Angel Riveros GuzmanNo ratings yet
- PE54.21-W-2400-97J Esquema Elétrico Do Módulo BásicoDocument9 pagesPE54.21-W-2400-97J Esquema Elétrico Do Módulo BásicoMarco SilverioNo ratings yet
- Device Status Number Suffix Code Latest Release Latest NumberDocument36 pagesDevice Status Number Suffix Code Latest Release Latest NumberGracia SediNo ratings yet
- 1N34ADocument1 page1N34Ayamaha640No ratings yet
- SibaDocument82 pagesSibaJuanita EspinozaNo ratings yet
- SEMIKRON DataSheet SKKH 42 07897892Document4 pagesSEMIKRON DataSheet SKKH 42 07897892An Trần Huỳnh PhúNo ratings yet
- Uninterruptible Power Supply (UPS)Document14 pagesUninterruptible Power Supply (UPS)Dharam SharmaNo ratings yet
- Andeli Catalogue PDFDocument404 pagesAndeli Catalogue PDFAlexander EscalonaNo ratings yet
- Villa Construction Program Gantt ChartDocument3 pagesVilla Construction Program Gantt ChartHarshalNo ratings yet
- DC TESLA COIL Construction and ApllicatiDocument5 pagesDC TESLA COIL Construction and ApllicatiwoodNo ratings yet
- Ecm 1 DDocument1 pageEcm 1 DJim Lieb0% (1)
- Essential Electrical Tools and Their UsesDocument3 pagesEssential Electrical Tools and Their UsesMario GeleroNo ratings yet
- Troubleshooting C15Document4 pagesTroubleshooting C15mohammad hazbehzadNo ratings yet
- Brick&Bolt Quality Assessment System - QASCONDocument24 pagesBrick&Bolt Quality Assessment System - QASCONPulkit ChawlaNo ratings yet
- KIA Picanto OWNER'S MANUALDocument10 pagesKIA Picanto OWNER'S MANUALTana PoonarkNo ratings yet
- Model 10/110 'LE Series' & Model 12/112 Target/Varmint SeriesDocument36 pagesModel 10/110 'LE Series' & Model 12/112 Target/Varmint SeriesEly WernerNo ratings yet
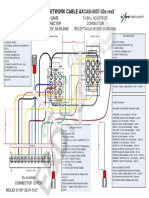
- AXESNETWORK CABLE AXCAB-0007-02a rev2 specificationsDocument1 pageAXESNETWORK CABLE AXCAB-0007-02a rev2 specificationsHarlan TaylorNo ratings yet
- Backup Protection of Transformer - Over Current and Earth Fault - Electrical4uDocument3 pagesBackup Protection of Transformer - Over Current and Earth Fault - Electrical4uAnonymous uGXvnLNo ratings yet
- Stepper Motor Hall Effect Limit & Homing Switches GuideDocument14 pagesStepper Motor Hall Effect Limit & Homing Switches Guidechafic WEISSNo ratings yet
- 101 - 200 KVA » Silent » LOVOL Genset Silent 100 Kva • Penjualan & Service Aneka Generator Set _ Genset - Perkins, Cummins, Deutz, MWM, FG Wilson, MAN, MTU, YANMAR, Mitsubishi, PRAMAC, Stamford, Leroy Somer, LovolDocument2 pages101 - 200 KVA » Silent » LOVOL Genset Silent 100 Kva • Penjualan & Service Aneka Generator Set _ Genset - Perkins, Cummins, Deutz, MWM, FG Wilson, MAN, MTU, YANMAR, Mitsubishi, PRAMAC, Stamford, Leroy Somer, LovolGIGsantonNo ratings yet
- Installation Manual Small VECTORDocument2 pagesInstallation Manual Small VECTORMinurajNo ratings yet