You might also like
- DocumentationDocument76 pagesDocumentationviswakshaNo ratings yet
- Analysis of Mobile IP For NS-2: Toni Janevski, Senior Member, IEEE, and Ivan PetrovDocument4 pagesAnalysis of Mobile IP For NS-2: Toni Janevski, Senior Member, IEEE, and Ivan PetrovviswakshaNo ratings yet
- DocumentationDocument70 pagesDocumentationviswakshaNo ratings yet
- C Programming: by Deepak Majeti M-Tech CSE Mdeepak@iitk - Ac.inDocument19 pagesC Programming: by Deepak Majeti M-Tech CSE Mdeepak@iitk - Ac.inviswakshaNo ratings yet
- 8 Bit Risc McuDocument6 pages8 Bit Risc McuviswakshaNo ratings yet
- Frequency Domain Packet Scheduling With MIMO For 3GPP LTE DownlinkDocument10 pagesFrequency Domain Packet Scheduling With MIMO For 3GPP LTE DownlinkviswakshaNo ratings yet
- 11 Performance AnalysisDocument6 pages11 Performance AnalysisviswakshaNo ratings yet
- A Novel Voice Verification System Using WaveletsDocument14 pagesA Novel Voice Verification System Using WaveletsviswakshaNo ratings yet
- 06 - Reversible Data Embedding Using Reflective BlocksDocument4 pages06 - Reversible Data Embedding Using Reflective BlocksviswakshaNo ratings yet
- Building Automated Robots: Sensors, Motors, and ControlDocument34 pagesBuilding Automated Robots: Sensors, Motors, and ControlviswakshaNo ratings yet
- Summary of Accounts Held Under Cust ID: 511365502 As On May 31, 2014Document2 pagesSummary of Accounts Held Under Cust ID: 511365502 As On May 31, 2014viswakshaNo ratings yet
- Rectangular Wave GuidesDocument44 pagesRectangular Wave GuidesArshadahcNo ratings yet
- Proposal 2Document2 pagesProposal 2viswakshaNo ratings yet
- C48 - Efficient Localization in Mobile Wireless Sensor NetworksDocument5 pagesC48 - Efficient Localization in Mobile Wireless Sensor NetworksviswakshaNo ratings yet
- Gabor FilterDocument23 pagesGabor Filtervitcon1909No ratings yet
- AodvDocument67 pagesAodvSushain SharmaNo ratings yet
- Lecture1 of RtsDocument29 pagesLecture1 of RtsEsha BindraNo ratings yet
- Rep07 17Document70 pagesRep07 17viswakshaNo ratings yet
- VerilogDocument61 pagesVeriloganukopoNo ratings yet
- Architecture of FPGAs and CPLDS: A TutorialDocument41 pagesArchitecture of FPGAs and CPLDS: A Tutorialgongster100% (5)
- Chapter 12Document72 pagesChapter 12viswakshaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Im Ac DC 1000 SD PDFDocument51 pagesIm Ac DC 1000 SD PDFAbdala Aziz HASSANNo ratings yet
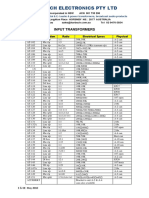
- Harbuch Electronics Pty LTD: Input TransformersDocument4 pagesHarbuch Electronics Pty LTD: Input Transformersattapapa100% (1)
- Allied Radio Data Handbook 1943Document52 pagesAllied Radio Data Handbook 1943MickShazanNo ratings yet
- Lab Report2Document5 pagesLab Report2Tanzidul AzizNo ratings yet
- 555 DC/DC Converter Generates Balanced Positive and Negative Supply VoltagesDocument1 page555 DC/DC Converter Generates Balanced Positive and Negative Supply Voltagestrmnmy100% (1)
- Hengxin HF Jumper CableDocument9 pagesHengxin HF Jumper Cableculeros1No ratings yet
- Pramac Product Catalogue Provides Details on Generators and Power EquipmentDocument56 pagesPramac Product Catalogue Provides Details on Generators and Power Equipmentxp234100% (1)
- Revista Renovetec 1Document66 pagesRevista Renovetec 1Arturo de la VegaNo ratings yet
- 800kVGIS Spec Rev1Document51 pages800kVGIS Spec Rev1JayadevDamodaranNo ratings yet
- Behringer Micromix Mx400: Welcome To Behringer ApplicationsDocument2 pagesBehringer Micromix Mx400: Welcome To Behringer ApplicationsArama0% (1)
- G08Document97 pagesG08jlcheefei9258No ratings yet
- Wolf Safety Lamp Company Turbolite 1 MinDocument3 pagesWolf Safety Lamp Company Turbolite 1 MinMohamedHussein MohamedHusseinNo ratings yet
- Find Faults Online with DIGITRACE DC-361P Earth LocatorDocument2 pagesFind Faults Online with DIGITRACE DC-361P Earth LocatorAnonymous hsw0vEQZ6NNo ratings yet
- Ed5 5Document8 pagesEd5 5Anonymous 4e7GNjzGWNo ratings yet
- ALSTOM I400 EN M F-Epslanguage en-GBDocument50 pagesALSTOM I400 EN M F-Epslanguage en-GBElectromontaj CraiovaNo ratings yet
- Tank Gauge Servicemanual Ed2 308012enDocument154 pagesTank Gauge Servicemanual Ed2 308012enRam KumarNo ratings yet
- m62424 SPDocument17 pagesm62424 SPRizal AssegafNo ratings yet
- Repairing The Electronic Devices: Laica Olvida Nichaela Jane D. TerribleDocument16 pagesRepairing The Electronic Devices: Laica Olvida Nichaela Jane D. Terribleanon_493312229No ratings yet
- Practical Applications of Dielectric PolarizationDocument57 pagesPractical Applications of Dielectric PolarizationChunesh Bhalla100% (2)
- Basic Electronic Tools & EquipmentDocument40 pagesBasic Electronic Tools & EquipmentKrizzie Mae Castillon83% (6)
- Cat Electronic Technician 2019A v1.0 Product Status ReportDocument32 pagesCat Electronic Technician 2019A v1.0 Product Status ReportsexslayerNo ratings yet
- CAT 3212C Diesel Generator SetsDocument5 pagesCAT 3212C Diesel Generator SetsRodolfo Curci PuracaNo ratings yet
- SKEM 3742 Electro Hydraulic LabsheetDocument6 pagesSKEM 3742 Electro Hydraulic Labsheetcikgu_relaNo ratings yet
- Siemens Mobilett XP Products Safety Information Performing The Checks in Accordance With Iec 62353Document34 pagesSiemens Mobilett XP Products Safety Information Performing The Checks in Accordance With Iec 62353Félix Enríquez0% (1)
- Irams10Up60A: Pd-94640 RevhDocument17 pagesIrams10Up60A: Pd-94640 RevhCleiton Da Gama GarciaNo ratings yet
- Ad8091 8092-1502159Document21 pagesAd8091 8092-1502159tulios6262No ratings yet
- mHAWK RHD MANUALDocument52 pagesmHAWK RHD MANUALJavierNo ratings yet
- 2 Stage OpampDocument7 pages2 Stage Opamprajalakshmi boopathiNo ratings yet
- Logic GatesDocument22 pagesLogic GatesHassan AlaradiNo ratings yet
- Heavy Duty Multipurpose Telephone Unit: Type HSB02Document13 pagesHeavy Duty Multipurpose Telephone Unit: Type HSB02advantage025No ratings yet