You might also like
- Question Report 437 PDFDocument48 pagesQuestion Report 437 PDFVivek JhaNo ratings yet
- Test Review: Section Title: Section 1 Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document16 pagesTest Review: Section Title: Section 1 Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Jee Advanced 2015 Math IIQuestions SolutionsDocument8 pagesJee Advanced 2015 Math IIQuestions SolutionstarunjinNo ratings yet
- Sumanta Chowdhury - CLS Aipmt-15-16 XIII Phy Study-Package-3 Set-1 Chapter-9Document26 pagesSumanta Chowdhury - CLS Aipmt-15-16 XIII Phy Study-Package-3 Set-1 Chapter-9samuel raj50% (2)
- Clinical Features in MedicineDocument97 pagesClinical Features in MedicinetarunjinNo ratings yet
- Test Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document9 pagesTest Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Select Question Out of 15: Online Test Review ForDocument1 pageSelect Question Out of 15: Online Test Review FortarunjinNo ratings yet
- CBSE Sample PaperDocument3 pagesCBSE Sample PapertarunjinNo ratings yet
- 106, DSIDC Complex Okhla Industrial Area, Phase-1 New Delhi - 110 020Document1 page106, DSIDC Complex Okhla Industrial Area, Phase-1 New Delhi - 110 020tarunjinNo ratings yet
- TEST REVIEW RESULTSDocument10 pagesTEST REVIEW RESULTStarunjinNo ratings yet
- Test Review: Section Title: General Aptitude One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document39 pagesTest Review: Section Title: General Aptitude One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Mechanical Engineering Objective Questions Part 15 PDFDocument40 pagesMechanical Engineering Objective Questions Part 15 PDFtarunjinNo ratings yet
- ME-71 Mock Test ReviewDocument39 pagesME-71 Mock Test ReviewtarunjinNo ratings yet
- Test Review: Section Title: General Aptitude One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document39 pagesTest Review: Section Title: General Aptitude One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Test Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document11 pagesTest Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Test Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33Document11 pagesTest Review: Section Title: One Mark Questions Total Questions: 5 Max Marks: 1 Ve Marks:0.33tarunjinNo ratings yet
- Sem 1 t1 201112 PhysicsDocument1 pageSem 1 t1 201112 PhysicstarunjinNo ratings yet
- FM 3Document9 pagesFM 3tarunjinNo ratings yet
- Me - Gate-2018 - FNDocument6 pagesMe - Gate-2018 - FNtarunjinNo ratings yet
- Sem 1 t2 201112 MathsDocument1 pageSem 1 t2 201112 MathstarunjinNo ratings yet
- Common Admission Brochure for DTU, IIITD, IGDTUW & NSITDocument52 pagesCommon Admission Brochure for DTU, IIITD, IGDTUW & NSITdebnathsuman49No ratings yet
- Chap 7Document87 pagesChap 7tarunjinNo ratings yet
- Polarization 4Document11 pagesPolarization 4tarunjinNo ratings yet
- Iocl R&D AdvertisementDocument7 pagesIocl R&D AdvertisementtarunjinNo ratings yet
- NLC 1728 PDFDocument4 pagesNLC 1728 PDFtarunjinNo ratings yet
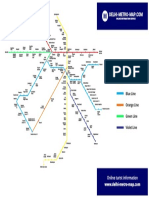
- Explore Delhi's Metro Map OnlineDocument1 pageExplore Delhi's Metro Map OnlinePan SmithNo ratings yet
- After Gate by S K MondalDocument3 pagesAfter Gate by S K MondalsonalibaraNo ratings yet
- Material Science Conventional Question and AnswerDocument14 pagesMaterial Science Conventional Question and AnswerChitransh Agarwal100% (3)
- Model Q Paper ESE 2017 GS EngggDocument14 pagesModel Q Paper ESE 2017 GS Enggginfinityanant2400206No ratings yet
- ESE Reforms PublicityDocument11 pagesESE Reforms PublicityChirag PatelNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Current Mode Pi ControllerDocument19 pagesCurrent Mode Pi ControllersunitaNo ratings yet
- Senior Flexonics Metal Hose Catalogue PDFDocument40 pagesSenior Flexonics Metal Hose Catalogue PDFAnonymous nw5AXJqjdNo ratings yet
- Spectrum CurrentDocument1 pageSpectrum CurrentXmd InOutNo ratings yet
- Contrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesDocument5 pagesContrasts Between Finite and Infinite Dimensional Spaces and Between Normed and Inner Product SpacesQuinton WestrichNo ratings yet
- Newton's Law of Cooling ExplainedDocument7 pagesNewton's Law of Cooling ExplainedReggie DuenasNo ratings yet
- Lab1 Intro Lissajous PDFDocument2 pagesLab1 Intro Lissajous PDFmldgmNo ratings yet
- Digital Booklet - Re-AnimatorDocument21 pagesDigital Booklet - Re-AnimatorMoz77No ratings yet
- Bored Socket in BasaltDocument8 pagesBored Socket in BasaltGULF PILING LLCNo ratings yet
- Ultrasonic FlowmetersDocument30 pagesUltrasonic Flowmetersvcharles0% (1)
- Committed To Quality Assurance And Certified In Accordance With DIN EN ISO 9001 08.94Document8 pagesCommitted To Quality Assurance And Certified In Accordance With DIN EN ISO 9001 08.94อุดมเดช ปานเงินNo ratings yet
- Gothic cathedral structural analysisDocument43 pagesGothic cathedral structural analysisManuelPérezNo ratings yet
- Shirokov 2020 IOP Conf. Ser. Mater. Sci. Eng. 775 012148Document8 pagesShirokov 2020 IOP Conf. Ser. Mater. Sci. Eng. 775 012148Tomás de AlmeidaNo ratings yet
- Analysis of Benzoic Acid Kinetics Using Temperature vs Time GraphsDocument3 pagesAnalysis of Benzoic Acid Kinetics Using Temperature vs Time GraphssnowinceptionNo ratings yet
- 3bit Flash ADC 180nmDocument6 pages3bit Flash ADC 180nmMurali ShettyNo ratings yet
- Raising New Generation Leaders Through Mechanics EducationDocument88 pagesRaising New Generation Leaders Through Mechanics EducationOluwaferanmi OgunleyeNo ratings yet
- C 0024 - TLZ THLZ - 04 08Document46 pagesC 0024 - TLZ THLZ - 04 08Oscar Alvitez DominguezNo ratings yet
- Forensic Engineering of Fire-Damaged StructuresDocument6 pagesForensic Engineering of Fire-Damaged StructuresMartinNo ratings yet
- GS1 AnsDocument3 pagesGS1 AnsGiemhel GeleraNo ratings yet
- An Inexpensive BRDF Model For Physically-Based RenderingDocument14 pagesAn Inexpensive BRDF Model For Physically-Based RenderingKmilo VinaTea ChavezNo ratings yet
- Polarization Index TestDocument3 pagesPolarization Index TestShahriar AhmedNo ratings yet
- 1D Advection-Diffusion MATLAB Code SolutionsDocument6 pages1D Advection-Diffusion MATLAB Code SolutionsAnonymous OrhjVLXO5sNo ratings yet
- Gases Tutorial 2Document4 pagesGases Tutorial 2Idil WarsameNo ratings yet
- AA Holtz & Kovacs - An Introduction To Geotechnical EngineeringDocument23 pagesAA Holtz & Kovacs - An Introduction To Geotechnical EngineeringfaizanNo ratings yet
- Imp 4Document38 pagesImp 4nikhilNo ratings yet
- ETEN4001 Tute1 2017Document3 pagesETEN4001 Tute1 2017Orlando CalderasNo ratings yet
- 4 Buckle TriggersDocument28 pages4 Buckle TriggersNguyen Hoai Phuong100% (1)
- TP PDFDocument1 pageTP PDFRîkèñ PâtélNo ratings yet
- Intramuscular EMG QuizDocument60 pagesIntramuscular EMG QuizMike Pascoe50% (2)
- Unit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Document32 pagesUnit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Zara Nabilah100% (2)
- Expt 4-Ionic EquilibriaDocument42 pagesExpt 4-Ionic EquilibriatwinkledreampoppiesNo ratings yet