You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Accion Control y Aplicacion de Motores ElectricosDocument358 pagesAccion Control y Aplicacion de Motores Electricosnikoll1953No ratings yet
- Significant Figures WorksheetDocument2 pagesSignificant Figures WorksheetKevin BakerNo ratings yet
- Introduction To Chemical CleaningDocument28 pagesIntroduction To Chemical Cleaningmordidomi0% (1)
- Lesson 5 - Transistor Behaviour and ModelsDocument40 pagesLesson 5 - Transistor Behaviour and ModelsS.m. FerdousNo ratings yet
- Lesson 4 - LEDs and PhotodiodesDocument17 pagesLesson 4 - LEDs and PhotodiodesS.m. FerdousNo ratings yet
- EmbeddedLab v1.60 RemoteDocsDocument197 pagesEmbeddedLab v1.60 RemoteDocsAshok ObuliNo ratings yet
- Recent Dev in Power Electronic - FinalDocument51 pagesRecent Dev in Power Electronic - FinalS.m. FerdousNo ratings yet
- Lesson 1 - Introduction and Diode ModelsDocument45 pagesLesson 1 - Introduction and Diode ModelsS.m. FerdousNo ratings yet
- Technical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionDocument16 pagesTechnical Implications of Electric Vehicle (EV) Integration For The Grid, Bulk and Local DistributionS.m. FerdousNo ratings yet
- ENG207 Operational Amplifiers Principles of Electronic InstrumentationDocument38 pagesENG207 Operational Amplifiers Principles of Electronic InstrumentationS.m. FerdousNo ratings yet
- Zener Diode Voltage Regulator Circuit DesignDocument32 pagesZener Diode Voltage Regulator Circuit DesignS.m. FerdousNo ratings yet
- Lesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)Document29 pagesLesson 2 - Simple Diode Models and Circuits - (Presentation - Slides)S.m. FerdousNo ratings yet
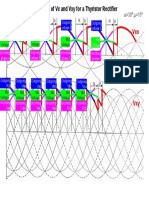
- Thyristor Commutation Animation VxVxyDocument1 pageThyristor Commutation Animation VxVxyS.m. FerdousNo ratings yet
- Recent Development in Power Electronic - ContentDocument2 pagesRecent Development in Power Electronic - ContentS.m. FerdousNo ratings yet
- AIPDocument19 pagesAIPS.m. FerdousNo ratings yet
- Busbar: Energy Storing and Recovering in Power Systems and Hev and EvDocument12 pagesBusbar: Energy Storing and Recovering in Power Systems and Hev and EvS.m. FerdousNo ratings yet
- FlywheelDocument8 pagesFlywheelS.m. FerdousNo ratings yet
- Comparative Study Between Series Resonant Converter and Parallel Resonant ConverterDocument23 pagesComparative Study Between Series Resonant Converter and Parallel Resonant ConverterS.m. FerdousNo ratings yet
- BatteryDocument9 pagesBatteryS.m. FerdousNo ratings yet
- The Status of Li-Ion Battery Development For LEV ApplicationsDocument4 pagesThe Status of Li-Ion Battery Development For LEV ApplicationsS.m. FerdousNo ratings yet
- 3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IDocument13 pages3.2.3 Flux-Weakening Control Design and Analysis: Semiaxis Because of IPierumberto PampaninNo ratings yet
- Normallised Parameters: The Parallel Resonant Converter: AnalysisDocument12 pagesNormallised Parameters: The Parallel Resonant Converter: AnalysisS.m. FerdousNo ratings yet
- Checklist For Chapter 6: Synchronous MotorsDocument2 pagesChecklist For Chapter 6: Synchronous MotorsS.m. FerdousNo ratings yet
- Analog MultipliersDocument5 pagesAnalog MultipliersS.m. FerdousNo ratings yet
- Quote For MR - Shuvo, American International University BangladeshDocument3 pagesQuote For MR - Shuvo, American International University BangladeshS.m. FerdousNo ratings yet
- Current Sources BJTDocument15 pagesCurrent Sources BJTS.m. FerdousNo ratings yet
- Checklist For Chapter 1: Introduction To Machinery PrinciplesDocument1 pageChecklist For Chapter 1: Introduction To Machinery PrinciplesS.m. FerdousNo ratings yet
- Chap 2Document11 pagesChap 2S.m. FerdousNo ratings yet
- Chapter 7 ChecklistDocument2 pagesChapter 7 ChecklistS.m. FerdousNo ratings yet
- Chap 1Document21 pagesChap 1S.m. FerdousNo ratings yet
- Cover PagesDocument12 pagesCover PagesS.m. FerdousNo ratings yet
- Chap 3Document42 pagesChap 3S.m. FerdousNo ratings yet
- Expt 4-Ionic EquilibriaDocument42 pagesExpt 4-Ionic EquilibriatwinkledreampoppiesNo ratings yet
- Infinite Sequences Lecture NotesDocument4 pagesInfinite Sequences Lecture NotesS.m. ChandrashekarNo ratings yet
- Electrostatic ForceDocument3 pagesElectrostatic ForceAlyssa Cole100% (1)
- Analysis of Benzoic Acid Kinetics Using Temperature vs Time GraphsDocument3 pagesAnalysis of Benzoic Acid Kinetics Using Temperature vs Time GraphssnowinceptionNo ratings yet
- 2-d. Statically Indeterminate Members: Ans. 3330 KNDocument2 pages2-d. Statically Indeterminate Members: Ans. 3330 KNJasleneDimarananNo ratings yet
- Open Metering System Specification: OMS-Data Point ListDocument23 pagesOpen Metering System Specification: OMS-Data Point ListjslynisongNo ratings yet
- ETEN4001 Tute1 2017Document3 pagesETEN4001 Tute1 2017Orlando CalderasNo ratings yet
- Preparation, Structure and Morphology of Polymer Supports: David C. SherringtonDocument12 pagesPreparation, Structure and Morphology of Polymer Supports: David C. Sherringtonkishorkumarn8212No ratings yet
- 4 D8722 DEd 01Document28 pages4 D8722 DEd 01Dhani AmeliaNo ratings yet
- Bachelor of Science in Agricultural and Biosystems EngineeringDocument4 pagesBachelor of Science in Agricultural and Biosystems Engineeringsheil.cogayNo ratings yet
- Aceros PoscoDocument35 pagesAceros PoscoregistrosegNo ratings yet
- Steel - WikipediaDocument16 pagesSteel - WikipediaaravindNo ratings yet
- Ec8451 Emf Lecture NotesDocument61 pagesEc8451 Emf Lecture NotesNarenthra BaalaNo ratings yet
- Vernacular ArchitectureDocument33 pagesVernacular ArchitectureShyam Sekhar MenonNo ratings yet
- June 2014 QP - M2 EdexcelDocument28 pagesJune 2014 QP - M2 EdexcelAmmar KarimiNo ratings yet
- Refractory Degradation in Glass Tank Melters. A Survey of Testing MethodsDocument5 pagesRefractory Degradation in Glass Tank Melters. A Survey of Testing MethodsRizqi Ahmad FauzanNo ratings yet
- Unit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Document32 pagesUnit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Zara Nabilah100% (2)
- Digital Booklet - Re-AnimatorDocument21 pagesDigital Booklet - Re-AnimatorMoz77No ratings yet
- Performance of HT & LT Catalyst: Amit Kumar Jha MT (Chemical) # 0247/7161Document25 pagesPerformance of HT & LT Catalyst: Amit Kumar Jha MT (Chemical) # 0247/7161sb1984_hithaldiaNo ratings yet
- V Dy DT A DV DT: Indian Language School GR Xi Physics Worksheet-1 2022-23 Chapter: Motion in A Straight Line SolutionsDocument3 pagesV Dy DT A DV DT: Indian Language School GR Xi Physics Worksheet-1 2022-23 Chapter: Motion in A Straight Line SolutionsRudra RoshanNo ratings yet
- Stopping Sight DistanceDocument28 pagesStopping Sight DistanceEman MousaNo ratings yet
- Asymptotic Orthogonality Analysis of Sparse Massive MIMO ChannelsDocument5 pagesAsymptotic Orthogonality Analysis of Sparse Massive MIMO Channelshendra lamNo ratings yet
- Neuber Plasticity Correction R&O Material CurveUR2202Document1 pageNeuber Plasticity Correction R&O Material CurveUR2202Eduardo Javier Granados SanchezNo ratings yet
- Electrical Characteristics of CablesDocument32 pagesElectrical Characteristics of CablesSupakint Suteepichatpunt100% (1)
- Chemistry Project XIIDocument13 pagesChemistry Project XIIKanav MalhotraNo ratings yet
- Vulkollan: The Ultimate ElastomerDocument24 pagesVulkollan: The Ultimate ElastomerMS Mechanic HSM 2No ratings yet
- POLARONS: Electron-Phonon Interactions in Polar CrystalsDocument31 pagesPOLARONS: Electron-Phonon Interactions in Polar CrystalscaccaNo ratings yet
- ControlExperiments - Precision Modular ServoDocument43 pagesControlExperiments - Precision Modular ServoNachoSainzNo ratings yet