You might also like
- 2 Modeling of DC MachinesDocument23 pages2 Modeling of DC MachinessubhasishpodderNo ratings yet
- DC MachinesDocument44 pagesDC Machinesselvithimmarajan@gmail.comNo ratings yet
- Simulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelDocument7 pagesSimulation of First Benchmark Model For Analysis of Subsynchronous Resonance in Power Systems Using SequelPabloNalogowskiNo ratings yet
- Ahmad ProjDocument11 pagesAhmad ProjSaifNo ratings yet
- 5 Controlled Rectifier DC Drives-Closed Loop - PpsDocument41 pages5 Controlled Rectifier DC Drives-Closed Loop - PpsRanjan KumarNo ratings yet
- DC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesDocument34 pagesDC Motor Drive: - General Concept - Speed Control - SCR Drives - Switched-Mode DC DrivesMohammed- KannanNo ratings yet
- Controlled Rectifier DC Drives GuideDocument25 pagesControlled Rectifier DC Drives GuideshonmlrNo ratings yet
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterDocument10 pagesAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoNo ratings yet
- Motor Star Delta ConnectionDocument11 pagesMotor Star Delta ConnectionsubirmeNo ratings yet
- Problemas Con MotoresDocument34 pagesProblemas Con MotoresJohn HuaricapchaNo ratings yet
- Power System Dynamics and ControlDocument9 pagesPower System Dynamics and ControlBiplab SarkarNo ratings yet
- ASEE-Energy Conversion and Conservation-2012Document13 pagesASEE-Energy Conversion and Conservation-2012sunshine heavenNo ratings yet
- Synchronous Machines PDFDocument49 pagesSynchronous Machines PDFPradeep_VashistNo ratings yet
- Field Oriented Control of VSI Fed Induction Motor DriveDocument10 pagesField Oriented Control of VSI Fed Induction Motor Drivesuhail ahmadNo ratings yet
- DC Motor Tutorial - DR Zainal Salam UTMJBDocument36 pagesDC Motor Tutorial - DR Zainal Salam UTMJBRicky SwinedickNo ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- Power Systems AssignmentDocument12 pagesPower Systems AssignmentJbmulindwaNo ratings yet
- Transient Stability Improvement Using Upfc and SVCDocument8 pagesTransient Stability Improvement Using Upfc and SVCSai Bhargav VeerabathiniNo ratings yet
- Edexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsDocument11 pagesEdexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsRem AremaniaNo ratings yet
- Pole Slip ProtectionDocument10 pagesPole Slip ProtectionAdrian ConstantinNo ratings yet
- ED Lab Manual Original - Exp 1 To Exp 5Document19 pagesED Lab Manual Original - Exp 1 To Exp 5Umang MewaraNo ratings yet
- Control System Lab ManualDocument62 pagesControl System Lab ManualVenkata Subramanian0% (1)
- Electrical Machine Ii: Chapter 5: Synchronous MachinesDocument58 pagesElectrical Machine Ii: Chapter 5: Synchronous MachinesHaile HrNo ratings yet
- Eep 203 Electromechanics LaboratoryDocument65 pagesEep 203 Electromechanics Laboratorysourabh_rohillaNo ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous MachinesbrunichNo ratings yet
- DC Machine PDFDocument35 pagesDC Machine PDFPulkit Kumar Chauhan92% (24)
- DC Machines Chapter SummaryDocument14 pagesDC Machines Chapter SummaryMajad RazakNo ratings yet
- Project AC MachinesDocument5 pagesProject AC MachinessurjanshkNo ratings yet
- Lecture 07 - Synchronous MachinesDocument98 pagesLecture 07 - Synchronous Machinesramkiran1989100% (1)
- Upec 2Document7 pagesUpec 2manjusingNo ratings yet
- BANNARI AMMAN INSTITUTE 2011 Regulations Question Bank EEE VII Power System Operation ControlDocument7 pagesBANNARI AMMAN INSTITUTE 2011 Regulations Question Bank EEE VII Power System Operation ControlnandhakumarmeNo ratings yet
- Rees DfigDocument50 pagesRees DfigSoham KaryakarteNo ratings yet
- 9-12sept2020 DC Motor DONEDocument9 pages9-12sept2020 DC Motor DONEKaushik KunaleNo ratings yet
- Project Report PDFDocument11 pagesProject Report PDFAlind DubeyNo ratings yet
- DC Machine FundamentalsDocument13 pagesDC Machine FundamentalsJamesDelmanNo ratings yet
- EAB 4323 EAB 4323 EAB 4323 EAB 4323 Power Electronics II Power Electronics IIDocument101 pagesEAB 4323 EAB 4323 EAB 4323 EAB 4323 Power Electronics II Power Electronics IIHafiq ParaNo ratings yet
- Three Phase Synchronous MachinesDocument14 pagesThree Phase Synchronous MachinesMohdFirdausNo ratings yet
- DC MotorDrivesDocument24 pagesDC MotorDrivesyohannes getachewNo ratings yet
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- Electrical Machines Lab ManualDocument41 pagesElectrical Machines Lab Manualsohaib hashmatNo ratings yet
- DC Power Generation Using Interior Permanent-Magnet MachinesDocument6 pagesDC Power Generation Using Interior Permanent-Magnet MachinesHosein AshourianNo ratings yet
- Lecture Notes Elec A6: Induction MachinesDocument39 pagesLecture Notes Elec A6: Induction MachinesRam PrasadNo ratings yet
- DC Motor and ResultDocument5 pagesDC Motor and ResultSomashekhar SNo ratings yet
- Question Paper Code:: Reg. No.Document4 pagesQuestion Paper Code:: Reg. No.gokulchandruNo ratings yet
- Chapter 8 - SynchronousDocument12 pagesChapter 8 - SynchronousLin ChongNo ratings yet
- PSD CDT28 Summary 6EEE1 CVS 2022-23 PDFDocument6 pagesPSD CDT28 Summary 6EEE1 CVS 2022-23 PDFNadeem KhanNo ratings yet
- ECE 320 Chapter 4: DC MotorsDocument7 pagesECE 320 Chapter 4: DC MotorsHüseyin Murat PolaterNo ratings yet
- Synchronous Machines GuideDocument48 pagesSynchronous Machines GuideMehtab AhmedNo ratings yet
- Ijest12 04 01 032 PDFDocument6 pagesIjest12 04 01 032 PDFNius Pahala NainggolanNo ratings yet
- Three-Phase Induction MotorDocument10 pagesThree-Phase Induction MotorMadarwi SarwaNo ratings yet
- EMA Lab1 Note - EM Energy ConversionDocument9 pagesEMA Lab1 Note - EM Energy ConversionArvin Glenn Pagala0% (1)
- DC GenDocument74 pagesDC GenAhmed58seribegawan100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Consumer Service Manual - NEPRADocument66 pagesConsumer Service Manual - NEPRAstubborn002No ratings yet
- Course Plan: Department of Electrical EngineeringDocument1 pageCourse Plan: Department of Electrical Engineeringstubborn002No ratings yet
- G120 PM250Document72 pagesG120 PM250stubborn002No ratings yet
- ABB - Generator Protections GuideDocument45 pagesABB - Generator Protections GuideAyesha ShaikhNo ratings yet
- Intresting Case History About Busbar Differential ProtectionDocument1 pageIntresting Case History About Busbar Differential ProtectionDaniel CabasaNo ratings yet
- My ReportDocument115 pagesMy Reportstubborn002No ratings yet
- P&G Pakistan Social Commitment Report 2008Document59 pagesP&G Pakistan Social Commitment Report 2008stubborn002No ratings yet
- 02-2 Excitation CourseDocument31 pages02-2 Excitation Coursestubborn002No ratings yet
- IEEE Engine Generator Paralleling ConceptsDocument50 pagesIEEE Engine Generator Paralleling ConceptstunghtdNo ratings yet
- Short 58 Loss of Excitation Protection FunctionDocument5 pagesShort 58 Loss of Excitation Protection Functionstubborn002No ratings yet
- Fire Fighting System Layout of Gul Ahmed Energy Limited PlantDocument1 pageFire Fighting System Layout of Gul Ahmed Energy Limited Plantstubborn002No ratings yet
- Distance Protection RelayDocument27 pagesDistance Protection RelaycallkalaiNo ratings yet
- 9907 173 Load Sharing Module Installation ManualDocument36 pages9907 173 Load Sharing Module Installation ManualLuis Antonio Garcia EsparzaNo ratings yet
- Layout of Fire Fighting System for Gul Ahmed Energy Limited Power PlantDocument2 pagesLayout of Fire Fighting System for Gul Ahmed Energy Limited Power Plantstubborn002No ratings yet
- 1mdu02005 en Re 216Document1,096 pages1mdu02005 en Re 216Slawomir Strazinski100% (1)
- Black Out Is Land OperationDocument41 pagesBlack Out Is Land Operationstubborn002No ratings yet
- GAEL Data SubstationDocument1 pageGAEL Data Substationstubborn002No ratings yet
- Comparison of Iec and Nema Schematic DiagramsDocument8 pagesComparison of Iec and Nema Schematic Diagramsdanferreiro8318No ratings yet
- TransducersDocument70 pagesTransducersknageswara_raoNo ratings yet
- LS Alternator PresentationDocument19 pagesLS Alternator Presentationstubborn002No ratings yet
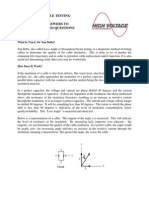
- Tan Delta FAQDocument6 pagesTan Delta FAQDev SwainNo ratings yet
- CT Testing Techniques OMICRON PDFDocument23 pagesCT Testing Techniques OMICRON PDFstubborn002100% (2)
- DC Motor Drives 2007Document48 pagesDC Motor Drives 2007stubborn002No ratings yet
- Analisa Water Hammer Pada Pipa Condensate PLTUDocument6 pagesAnalisa Water Hammer Pada Pipa Condensate PLTUamrullah100% (1)
- Choke Valvess AOPDocument8 pagesChoke Valvess AOPclaudio godinezNo ratings yet
- Repair of Tube-Tubesheet Weld Cracks in A Cracked Gas/Steam Heat ExchangerDocument8 pagesRepair of Tube-Tubesheet Weld Cracks in A Cracked Gas/Steam Heat Exchangermontie3No ratings yet
- Experiment 104 Torque: 2 Condition of Equilibrium: PhysicsDocument4 pagesExperiment 104 Torque: 2 Condition of Equilibrium: PhysicsJag MasterNo ratings yet
- Modified Asphalt Binders: Need of Present PavementsDocument85 pagesModified Asphalt Binders: Need of Present PavementsPalika ChopraNo ratings yet
- Stainless Steel Float Level Switch and Mechanical Float Switch for Tank Level MonitoringDocument1 pageStainless Steel Float Level Switch and Mechanical Float Switch for Tank Level MonitoringErick Nacor ArevaloNo ratings yet
- Soils and Foundations - Failure behavior of soil nail reinforced slopesDocument13 pagesSoils and Foundations - Failure behavior of soil nail reinforced slopesRivaiNo ratings yet
- Lg956l&Lg958l&Lg959 Service ManualDocument367 pagesLg956l&Lg958l&Lg959 Service ManualAimHigh100% (1)
- Accra Technical University: Index NumberDocument6 pagesAccra Technical University: Index NumberMoro Adams100% (1)
- Earthquake DescriptorsDocument13 pagesEarthquake DescriptorsDiane Demariano Torcuator60% (5)
- 3 - 2017 - Superia X 5 StarDocument26 pages3 - 2017 - Superia X 5 Starsomnath serviceNo ratings yet
- Training ProjectDocument43 pagesTraining ProjectlokeshkrkushwahaNo ratings yet
- Guide to Selecting Artificial Lift for Gas WellsDocument20 pagesGuide to Selecting Artificial Lift for Gas WellsRaymundo Leonardo Pérez SierraNo ratings yet
- Grundfos Catalogue Industry and Water UtilityDocument542 pagesGrundfos Catalogue Industry and Water UtilityAdina Mariana Costache100% (7)
- 1.0 2.0 The Importance of Maintenance 3.0 Maintenance Activites 4.0 Types of MaintenanceDocument11 pages1.0 2.0 The Importance of Maintenance 3.0 Maintenance Activites 4.0 Types of MaintenanceIstiQamahh MuhamadNo ratings yet
- Determination of The Tensile Strength of An OCF Canister FoamDocument3 pagesDetermination of The Tensile Strength of An OCF Canister Foamemre sönmezNo ratings yet
- "View" "Slide Show.": Resources Chapter MenuDocument62 pages"View" "Slide Show.": Resources Chapter Menuelty TanNo ratings yet
- Oldsmobile Engine DecoderDocument5 pagesOldsmobile Engine DecoderJohn PerzyloNo ratings yet
- Kobelco 70SR: The Most Awesome 7-Ton Excavator Under 40 CharactersDocument16 pagesKobelco 70SR: The Most Awesome 7-Ton Excavator Under 40 Charactershaiccdk6No ratings yet
- 800reozm 0318Document3 pages800reozm 0318Xuân Huy NguyễnNo ratings yet
- Keckley - Control Valves mm2Document23 pagesKeckley - Control Valves mm2DEVNo ratings yet
- Parts Manual JLG 3507, 3508, 3509, 3512,3513, 4007,4008, 4009,4012, 4013Document496 pagesParts Manual JLG 3507, 3508, 3509, 3512,3513, 4007,4008, 4009,4012, 4013Андрей Яковлев100% (4)
- Metrology Chapter 13Document70 pagesMetrology Chapter 13Sweekar KhadkaNo ratings yet
- Theory of Elasticity and Plasticity Lab Experiment No. 3 Study On AnisotropyDocument7 pagesTheory of Elasticity and Plasticity Lab Experiment No. 3 Study On AnisotropyVipul AgrawalNo ratings yet
- Two Rotor CDocument3 pagesTwo Rotor CmuralidharanNo ratings yet
- Marcet Boiler Final Lab ReportDocument14 pagesMarcet Boiler Final Lab ReportHerschelle ShongweNo ratings yet
- Pipe 02: by TRC - Tiger's Review CenterDocument119 pagesPipe 02: by TRC - Tiger's Review Centerkristan7No ratings yet
- Class IX: Science Chapter 11: Work and Energy Chapter Notes Key LearningDocument2 pagesClass IX: Science Chapter 11: Work and Energy Chapter Notes Key LearningMohanNayakNo ratings yet
- Question Bank - HMTDocument5 pagesQuestion Bank - HMTSUNDARAMAHALINGAM ANo ratings yet
- Shankar DurgamDocument9 pagesShankar DurgamasdfNo ratings yet