You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fisiologia de KatzDocument663 pagesFisiologia de KatzOscar Gascon100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- MAS Assessment Exam Answer Key SolutionDocument7 pagesMAS Assessment Exam Answer Key SolutionJonalyn JavierNo ratings yet
- Sine and Cosine Exam QuestionsDocument8 pagesSine and Cosine Exam QuestionsGamer Shabs100% (1)
- Airbus Reference Language AbbreviationsDocument66 pagesAirbus Reference Language Abbreviations862405No ratings yet
- Homeroom Guidance Grade 12 Quarter - Module 4 Decisive PersonDocument4 pagesHomeroom Guidance Grade 12 Quarter - Module 4 Decisive PersonMhiaBuenafe86% (36)
- Investigation of PWM Current Mode ControllersDocument6 pagesInvestigation of PWM Current Mode ControllersGanesh DharmireddyNo ratings yet
- A Voltage Controller in Photo-Voltaic SystemDocument6 pagesA Voltage Controller in Photo-Voltaic SystemGanesh DharmireddyNo ratings yet
- Sai Chandra-Pradeep-AliDocument44 pagesSai Chandra-Pradeep-AliGanesh DharmireddyNo ratings yet
- 127 1489 1 PBDocument10 pages127 1489 1 PBsraj_4uNo ratings yet
- Electrical Sciences-I: Sudheer HDocument67 pagesElectrical Sciences-I: Sudheer HGanesh DharmireddyNo ratings yet
- l2 Applications of Power Electronics 130701122140 Phpapp02 PDFDocument16 pagesl2 Applications of Power Electronics 130701122140 Phpapp02 PDFGanesh Dharmireddy100% (1)
- Electrical Sciences-I: Sudheer HDocument67 pagesElectrical Sciences-I: Sudheer HGanesh DharmireddyNo ratings yet
- ELECTRICAL SCIENCES - IDocument39 pagesELECTRICAL SCIENCES - IGanesh DharmireddyNo ratings yet
- l1 Introduction To Power Electronics 130627131834 Phpapp02 PDFDocument15 pagesl1 Introduction To Power Electronics 130627131834 Phpapp02 PDFGanesh Dharmireddy100% (1)
- ELECTRICAL SCIENCES - IDocument39 pagesELECTRICAL SCIENCES - IGanesh DharmireddyNo ratings yet
- Introduction 2003Document41 pagesIntroduction 2003Selva RajNo ratings yet
- Compre Queation PaperDocument6 pagesCompre Queation PaperGanesh DharmireddyNo ratings yet
- Jenna's Machines-1 Notes CollectionDocument145 pagesJenna's Machines-1 Notes CollectionGanesh Dharmireddy75% (4)
- Adaptive Repetitive Control of PWMDocument9 pagesAdaptive Repetitive Control of PWMGanesh DharmireddyNo ratings yet
- Analysis and Implementation of A Modified Robust Model Reference AdaptiveDocument5 pagesAnalysis and Implementation of A Modified Robust Model Reference AdaptiveGanesh DharmireddyNo ratings yet
- Design and Construction of A PC-BasedDocument6 pagesDesign and Construction of A PC-BasedGanesh DharmireddyNo ratings yet
- General Essay Group1Document2 pagesGeneral Essay Group1Mural Krishnai.MNo ratings yet
- Adaptive Repetitive Control of A PWM Inverter For AC VoltageDocument7 pagesAdaptive Repetitive Control of A PWM Inverter For AC VoltageGanesh DharmireddyNo ratings yet
- Design and Construction of A PC-BasedDocument6 pagesDesign and Construction of A PC-BasedGanesh DharmireddyNo ratings yet
- Design and Implementation of An FPGA-BasedDocument11 pagesDesign and Implementation of An FPGA-BasedGanesh DharmireddyNo ratings yet
- A Current-Mode Control TechniqueDocument7 pagesA Current-Mode Control TechniqueGanesh DharmireddyNo ratings yet
- Adaptive Repetitive Control of A PWM Inverter For AC VoltageDocument7 pagesAdaptive Repetitive Control of A PWM Inverter For AC VoltageGanesh DharmireddyNo ratings yet
- Adaptive Repetitive Control of PWMDocument9 pagesAdaptive Repetitive Control of PWMGanesh DharmireddyNo ratings yet
- Design and Implementation of An FPGA-Based Motor Control ICDocument5 pagesDesign and Implementation of An FPGA-Based Motor Control ICGanesh DharmireddyNo ratings yet
- Analysis and Implementation of A Modified Robust Model Reference AdaptiveDocument5 pagesAnalysis and Implementation of A Modified Robust Model Reference AdaptiveGanesh DharmireddyNo ratings yet
- Mathematical Model of New Bi-DirectionalDocument5 pagesMathematical Model of New Bi-DirectionalGanesh DharmireddyNo ratings yet
- CEA-2010 by ManishDocument10 pagesCEA-2010 by ManishShishpal Singh NegiNo ratings yet
- JMC250Document2 pagesJMC250abhijit99541623974426No ratings yet
- Long Standoff Demolition Warheads For Armor, Masonry and Concrete TargetsDocument27 pagesLong Standoff Demolition Warheads For Armor, Masonry and Concrete Targetsahky7No ratings yet
- Reasons for Conducting Qualitative ResearchDocument12 pagesReasons for Conducting Qualitative ResearchMa. Rhona Faye MedesNo ratings yet
- Berserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional StrengthDocument10 pagesBerserker - Lifting Wood and Stone Like A Viking Strongman Bodybuilding Functional Strengthluciferr71No ratings yet
- BSHM 23 ReviewerDocument8 pagesBSHM 23 ReviewerTrixie Mae MuncadaNo ratings yet
- FALLSEM2019-20 STS4021 SS VL2019201000258 Reference Material I 11-Jul-2019 CAT1-4021-Integ-AS PDFDocument14 pagesFALLSEM2019-20 STS4021 SS VL2019201000258 Reference Material I 11-Jul-2019 CAT1-4021-Integ-AS PDFjahnavi rajuNo ratings yet
- Communication in Application: WhatsappDocument18 pagesCommunication in Application: WhatsappNurul SuhanaNo ratings yet
- Ecma L1221BR3 PD02 05172016Document2 pagesEcma L1221BR3 PD02 05172016Anil JindalNo ratings yet
- Youtube SrsDocument23 pagesYoutube Srsabhinandan PandeyNo ratings yet
- 09 Lift Cylinder Drift (Bulldozer) - CheckDocument2 pages09 Lift Cylinder Drift (Bulldozer) - CheckFredy Manrique AstoNo ratings yet
- NT140WHM N46Document34 pagesNT140WHM N46arif.fahmiNo ratings yet
- Regional Office X: Republic of The PhilippinesDocument2 pagesRegional Office X: Republic of The PhilippinesCoreine Imee ValledorNo ratings yet
- E Series CatalystDocument1 pageE Series CatalystEmiZNo ratings yet
- Mumbai Tourist Attractions.Document2 pagesMumbai Tourist Attractions.Guru SanNo ratings yet
- CSIR AnalysisDocument1 pageCSIR Analysisசெபா செல்வாNo ratings yet
- A-00 IndexDocument10 pagesA-00 IndexNizarHamrouniNo ratings yet
- FRP/HDPE septic tank specificationDocument2 pagesFRP/HDPE septic tank specificationpeakfortuneNo ratings yet
- Axis Bank Placement Paper Interview Questions 48072Document3 pagesAxis Bank Placement Paper Interview Questions 48072Ravi RanjanNo ratings yet
- Mechanical Function of The HeartDocument28 pagesMechanical Function of The HeartKarmilahNNo ratings yet
- Trusted Cloud Computing by Helmut Krcmar, Ralf Reussner, Bernhard Rumpe (Eds.)Document335 pagesTrusted Cloud Computing by Helmut Krcmar, Ralf Reussner, Bernhard Rumpe (Eds.)Hari HaranNo ratings yet
- Pantone and K100 Reverse White MedicineDocument16 pagesPantone and K100 Reverse White MedicinepaanarNo ratings yet
- Doohap supplier and customer segmentationDocument2 pagesDoohap supplier and customer segmentationPriyah RathakrishnahNo ratings yet
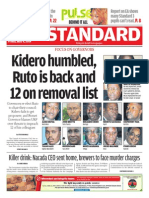
- The Standard 09.05.2014Document96 pagesThe Standard 09.05.2014Zachary Monroe100% (1)
- Awwa c207 Flanges Spec SheetDocument13 pagesAwwa c207 Flanges Spec SheetVincent DiepNo ratings yet