You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Art of Rigging Vol I Book - CG ToolkitDocument129 pagesArt of Rigging Vol I Book - CG Toolkitdiamondeba100% (14)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Essential Blender 07 Rigging and Skinning TutorialDocument16 pagesEssential Blender 07 Rigging and Skinning TutorialAhmad Musaffa100% (2)
- User Manual For X Muscle BlenderDocument40 pagesUser Manual For X Muscle BlenderHassan salehNo ratings yet
- 3D Total's Introduction To Rigging 3ds MaxDocument106 pages3D Total's Introduction To Rigging 3ds MaxNagato LiNo ratings yet
- Aga Khan PalaceDocument2 pagesAga Khan PalacePravin YadavNo ratings yet
- History Political Science WorksheetDocument2 pagesHistory Political Science WorksheetPravin YadavNo ratings yet
- Augmented RealityDocument11 pagesAugmented RealityPravin YadavNo ratings yet
- GK Quiz STD VDocument8 pagesGK Quiz STD VPravin YadavNo ratings yet
- Allsop Jake - Very Short Stories PDFDocument113 pagesAllsop Jake - Very Short Stories PDFErnestoNo ratings yet
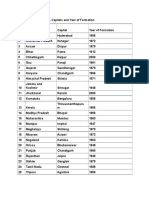
- List of Indian States and Union TerritoriesDocument2 pagesList of Indian States and Union TerritoriesPravin YadavNo ratings yet
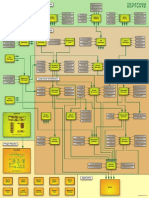
- C 4 Engine ArchitectureDocument1 pageC 4 Engine ArchitecturePravin YadavNo ratings yet
- Oscar Wilde's Short StoriesDocument42 pagesOscar Wilde's Short StoriesAndersonSmithNo ratings yet
- Diwali GreetingDocument2 pagesDiwali GreetingPravin YadavNo ratings yet
- Design Document Template - ChaptersDocument17 pagesDesign Document Template - ChaptersSuresh SaiNo ratings yet
- Human Face RecognitionDocument26 pagesHuman Face Recognitionniall_aNo ratings yet
- HumanIK BrochureDocument2 pagesHumanIK BrochuregeorgemmNo ratings yet
- Unity Character Animation With Mecanim - Sample ChapterDocument29 pagesUnity Character Animation With Mecanim - Sample ChapterPackt PublishingNo ratings yet
- A Tutorial On Motion Capture Driven Character AnimDocument7 pagesA Tutorial On Motion Capture Driven Character AnimapisvdnNo ratings yet
- Tips For The UberectorDocument27 pagesTips For The UberectorChristian TirthaNo ratings yet
- Houdini: Rigging GuideDocument36 pagesHoudini: Rigging GuideAhmad TantawyNo ratings yet
- "How Can I Rig A Cartoon Worm Character?": Solutions / Fixes / AdviceDocument4 pages"How Can I Rig A Cartoon Worm Character?": Solutions / Fixes / AdviceDouglas DuarteNo ratings yet
- Ccs352-Unit 4Document10 pagesCcs352-Unit 4Reshma RadhakrishnanNo ratings yet
- SOSZYNSKI, F. WOŁOWSK, J. STASIAK, B. Music Games As A Tool Supporting Music EducationDocument249 pagesSOSZYNSKI, F. WOŁOWSK, J. STASIAK, B. Music Games As A Tool Supporting Music EducationLeonardo PassosNo ratings yet
- 2020-21 Course Descriptions: UndergraduateDocument252 pages2020-21 Course Descriptions: UndergraduateJuliana BachNo ratings yet
- Real-Time Character Animation Techniques: March 2000Document15 pagesReal-Time Character Animation Techniques: March 2000KetrosNo ratings yet
- Sun Temple SimranDocument94 pagesSun Temple SimranGagandeep KaurNo ratings yet
- SCAD Course Descriptions InfoDocument366 pagesSCAD Course Descriptions InfomadhushreeNo ratings yet
- 3D Graphics For Game Programming PDFDocument325 pages3D Graphics For Game Programming PDFMars Kokila100% (1)
- User GuideDocument30 pagesUser GuideLicinio SouzaNo ratings yet
- Exam Objectives: Autodesk Certified User: 3ds MaxDocument5 pagesExam Objectives: Autodesk Certified User: 3ds Maxkaulah gileNo ratings yet
- Maya RigDocument329 pagesMaya Rigskynet24100% (2)
- Bounded Bi Harmonic Weights Siggraph 2011 Compressed Jacobson Et AlDocument8 pagesBounded Bi Harmonic Weights Siggraph 2011 Compressed Jacobson Et AlEnrique GarciaNo ratings yet
- Anim School CatalogDocument23 pagesAnim School Catalogahmd saifNo ratings yet
- Practical Game Development With Unity and BlenderDocument353 pagesPractical Game Development With Unity and BlenderFara Nume100% (2)
- (LU) Automated Blendshape Personalization For Faithful Face Animations Using Commodity SmartphonesDocument9 pages(LU) Automated Blendshape Personalization For Faithful Face Animations Using Commodity SmartphonesmonacothelegendNo ratings yet
- Computer AnimationDocument42 pagesComputer AnimationAmberShahNo ratings yet
- 3D FundamentalsDocument25 pages3D FundamentalsLuDKNo ratings yet
- BlenRig 5 Quick Introduction GuideDocument37 pagesBlenRig 5 Quick Introduction GuideAriel GimenezNo ratings yet
- Introduction To RiggingDocument72 pagesIntroduction To Riggingblenderpodcast100% (7)
- App Solat Ketika SakitDocument63 pagesApp Solat Ketika SakitRushdan Mat Fwd TakafulNo ratings yet
- Essay On Graphic Designing SkillDocument10 pagesEssay On Graphic Designing SkillAditya Raj chaudharyNo ratings yet