You might also like
- 2018 Date SSDocument7 pages2018 Date SSUsama JavedNo ratings yet
- The Unknown Places of StockholmDocument5 pagesThe Unknown Places of StockholmUsama JavedNo ratings yet
- TextDocument2 pagesTextUsama JavedNo ratings yet
- Sample Configure FileDocument108 pagesSample Configure FileUsama JavedNo ratings yet
- The - Snowman.2017.1080p.bluray.x264 (YTS - Ag)Document91 pagesThe - Snowman.2017.1080p.bluray.x264 (YTS - Ag)Usama JavedNo ratings yet
- Anx - ADocument16 pagesAnx - AUsama JavedNo ratings yet
- Counterpart - 01x03 - The Lost Art ofDocument57 pagesCounterpart - 01x03 - The Lost Art ofUsama JavedNo ratings yet
- Engineering Rank EE Rank: University Sr. No. Grad Acceptance Rate Deadline For SeptemberDocument9 pagesEngineering Rank EE Rank: University Sr. No. Grad Acceptance Rate Deadline For SeptemberUsama JavedNo ratings yet
- IELTS Information For Candidates 2014Document8 pagesIELTS Information For Candidates 2014Robert PopNo ratings yet
- I S P D: 2016 Nternational Ymposium On Hysical EsignDocument2 pagesI S P D: 2016 Nternational Ymposium On Hysical EsignUsama JavedNo ratings yet
- Berlin Station - 02x05 - Right ofDocument72 pagesBerlin Station - 02x05 - Right ofUsama JavedNo ratings yet
- Microsoft Word Shortcut KeysDocument4 pagesMicrosoft Word Shortcut Keyssophia_stephy9478No ratings yet
- InternetDocument2 pagesInternetUsama JavedNo ratings yet
- Matconvnet ManualDocument59 pagesMatconvnet ManualUsama JavedNo ratings yet
- ETHZ Lecture5Document50 pagesETHZ Lecture5Usama JavedNo ratings yet
- CS231n Convolutional Neural Networks For Visual RecognitionDocument25 pagesCS231n Convolutional Neural Networks For Visual RecognitionUsama JavedNo ratings yet
- License OPenCVDocument1 pageLicense OPenCVPutra SuciptoNo ratings yet
- Xilinx Windows 10 FixDocument1 pageXilinx Windows 10 FixUsama JavedNo ratings yet
- Ielts Application For The Issue of Additional TrfsDocument1 pageIelts Application For The Issue of Additional TrfsUsama JavedNo ratings yet
- Lif NeuronDocument6 pagesLif NeuronUsama JavedNo ratings yet
- October 16Document24 pagesOctober 16Usama JavedNo ratings yet
- Physical DesignDocument10 pagesPhysical DesignUsama JavedNo ratings yet
- MIT Department InfoDocument20 pagesMIT Department Infofaizfrasat123No ratings yet
- University Sr. No. Grad Acceptance Rate: EE Rank Engineering RankDocument12 pagesUniversity Sr. No. Grad Acceptance Rate: EE Rank Engineering RankGhayas Ud-din DarNo ratings yet
- Eco 130 (Lec 29-30)Document7 pagesEco 130 (Lec 29-30)Usama JavedNo ratings yet
- CVPR 2016Document54 pagesCVPR 2016Usama JavedNo ratings yet
- DAC List of ODA Recipients 2014 FinalDocument1 pageDAC List of ODA Recipients 2014 FinalTitán Do NascimientoNo ratings yet
- ReadmeDocument1 pageReadmeUsama JavedNo ratings yet
- ELG6163 Implementation of FIRDocument11 pagesELG6163 Implementation of FIRUsama JavedNo ratings yet
- Assignment 3Document1 pageAssignment 3Usama JavedNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- E7 2 - Gpon 8Document4 pagesE7 2 - Gpon 8Phan Trường ThịnhNo ratings yet
- Using SystemDocument4 pagesUsing SystemTribhuwan KushwahaNo ratings yet
- 1 9 1440 - Zuw - LDocument9 pages1 9 1440 - Zuw - LFuad Almahry100% (1)
- Revit + BIMDocument11 pagesRevit + BIMPABITRA KUMAR PUHANNo ratings yet
- Mysql Vs Mariadb Vs Postgresql Comparison Sheet Name MysqlDocument3 pagesMysql Vs Mariadb Vs Postgresql Comparison Sheet Name MysqlAnonymous 9aBmv7GFWNo ratings yet
- Pompeii and HerculaneumDocument21 pagesPompeii and HerculaneumMark Royters100% (4)
- First Floor PlanDocument1 pageFirst Floor PlanHEET MEWADANo ratings yet
- Radio-Frequency Identification (Rfid) : Internal Test IDocument6 pagesRadio-Frequency Identification (Rfid) : Internal Test IjayanthikrishnanNo ratings yet
- Chapter 1 Introduction To Data Communications: Networking in The Internet AgeDocument48 pagesChapter 1 Introduction To Data Communications: Networking in The Internet AgeJohn Joshua MontañezNo ratings yet
- PCI N03 KP LedgeDocument4 pagesPCI N03 KP Ledgekifayathulla003No ratings yet
- BOSS Air and Dirt Separation BrochureDocument8 pagesBOSS Air and Dirt Separation BrochureWayde WillinsNo ratings yet
- Home Work-9Document3 pagesHome Work-9zahed83No ratings yet
- Format Disk SolarisDocument4 pagesFormat Disk SolarisrajuyjNo ratings yet
- Multiple Concurrent Remote Desktop in Win XPDocument5 pagesMultiple Concurrent Remote Desktop in Win XPalucardchaNo ratings yet
- Garleton Castle: Southwest Lodge, Athelstaneford, East LothianDocument123 pagesGarleton Castle: Southwest Lodge, Athelstaneford, East LothianDavid Connolly100% (1)
- OTC000005 OTN Introduction ISSUE1.00Document73 pagesOTC000005 OTN Introduction ISSUE1.00Mohammed Kumayl100% (1)
- Primavera P6 Database Connection Configuration Details - Ten Six ConsultingDocument4 pagesPrimavera P6 Database Connection Configuration Details - Ten Six ConsultingMuhammad Abdul Wajid RaiNo ratings yet
- Sony Vaio Ms12 Mbx-149 - Rev 2.0Document67 pagesSony Vaio Ms12 Mbx-149 - Rev 2.0paco2012xx21100% (1)
- 802 Example Sample QuestionsDocument388 pages802 Example Sample QuestionsJossieNo ratings yet
- Raj Rewal Architecture Case StudyDocument4 pagesRaj Rewal Architecture Case StudyAnkush Bharti0% (1)
- Concrete PDFDocument35 pagesConcrete PDFRitesh PaliwalNo ratings yet
- User Profile Wizard 3.0 User GuideDocument70 pagesUser Profile Wizard 3.0 User GuideJuan Manuel MorrisNo ratings yet
- Revised 2 Storey House W Elelc PlumbingDocument2 pagesRevised 2 Storey House W Elelc PlumbingLucio AdaNo ratings yet
- Integrated Sustainable DesignDocument161 pagesIntegrated Sustainable DesignDimitris Sampatakos100% (1)
- Wireless Captive PortalsDocument16 pagesWireless Captive PortalsLuka O TonyNo ratings yet
- MST of Road KerbDocument2 pagesMST of Road KerbMital DamaniNo ratings yet
- Engineering Consultant FirmDocument6 pagesEngineering Consultant Firmimteaz00No ratings yet
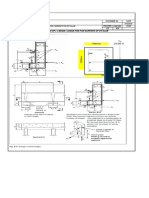
- Description: Solar Structure For 9x200Wp Base Plate Was 250x250 Cleat Angle Revised Part No 11 AddedDocument6 pagesDescription: Solar Structure For 9x200Wp Base Plate Was 250x250 Cleat Angle Revised Part No 11 Addedneerajdwivedi49No ratings yet
- Compaction Quality Control of Earth Fills Using Dynamic Cone PenetrometerDocument10 pagesCompaction Quality Control of Earth Fills Using Dynamic Cone PenetrometerDannyChaconNo ratings yet
- Roof-Plan Lay OutDocument33 pagesRoof-Plan Lay OutEugen GacheNo ratings yet