You might also like
- Feedback Control Performance MeasuresDocument37 pagesFeedback Control Performance MeasuresmrkmatNo ratings yet
- Modelica Thermal ModelingDocument4 pagesModelica Thermal Modelingthulasi_krishnaNo ratings yet
- Expense Tracker: Date Purpose Payment Method Transaction # Payee Expense Category Notes Amount Total ExpensesDocument9 pagesExpense Tracker: Date Purpose Payment Method Transaction # Payee Expense Category Notes Amount Total Expensesthulasi_krishnaNo ratings yet
- Economic and Product Design Considerations in Machiningchapter 24Document38 pagesEconomic and Product Design Considerations in Machiningchapter 24احمد عمر حديدNo ratings yet
- Project Status Dashboard Xl2007Document22 pagesProject Status Dashboard Xl2007Jkjiwani AccaNo ratings yet
- Seals and Gaskets: 3.0 Table of ContentsDocument40 pagesSeals and Gaskets: 3.0 Table of Contentsthulasi_krishnaNo ratings yet
- Mil DTL 38999 Series IIIDocument10 pagesMil DTL 38999 Series IIIthulasi_krishnaNo ratings yet
- Model Based Systems Engineering For Aircraft Systems - How DoesDocument9 pagesModel Based Systems Engineering For Aircraft Systems - How DoesAlmas QasimNo ratings yet
- Chinese Baby Gender Chart - Lunar Month of ConceptionDocument6 pagesChinese Baby Gender Chart - Lunar Month of Conceptionthulasi_krishnaNo ratings yet
- CarboTherm TB2 0213 R02Document2 pagesCarboTherm TB2 0213 R02thulasi_krishnaNo ratings yet
- Gearmotor size estimator spreadsheetDocument2 pagesGearmotor size estimator spreadsheetS C GaurNo ratings yet
- F 4Document9 pagesF 4thulasi_krishnaNo ratings yet
- FastenersDocument178 pagesFastenersthulasi_krishna100% (6)
- Seal Design Considerations Using Kalrez PartsDocument4 pagesSeal Design Considerations Using Kalrez Partsthulasi_krishnaNo ratings yet
- Valve Sizing CalculationsDocument20 pagesValve Sizing Calculationsask_friend100% (3)
- Technical Manual - O-Ring Gland Design InformationDocument31 pagesTechnical Manual - O-Ring Gland Design InformationplaunieNo ratings yet
- Brushless DC Motor Phase Poles Lot ConfigurationsDocument17 pagesBrushless DC Motor Phase Poles Lot Configurationsthulasi_krishnaNo ratings yet
- LaminateDocument3 pagesLaminatethulasi_krishnaNo ratings yet
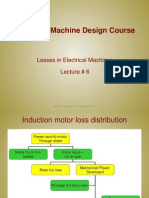
- Lecture6 - Losses in Electric MachinesDocument24 pagesLecture6 - Losses in Electric Machinesthulasi_krishnaNo ratings yet
- Lecture2 - Basic Electric Motor & Generator TheoryDocument21 pagesLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaNo ratings yet
- Lecture3 - Three Phase Power Converter Control Strategies For Three Machine TypesDocument26 pagesLecture3 - Three Phase Power Converter Control Strategies For Three Machine Typesthulasi_krishnaNo ratings yet
- Electromagnetic Design of DC MotorsDocument24 pagesElectromagnetic Design of DC Motorsthulasi_krishna100% (1)
- Projectto Dolist1Document2 pagesProjectto Dolist1Vikas PhatakNo ratings yet
- Lecture1 - History & IntroductionDocument20 pagesLecture1 - History & Introductionramaswamykama786100% (1)
- Lecture2 - Basic Electric Motor & Generator TheoryDocument21 pagesLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaNo ratings yet
- Random Vibration - An Overview - BarryControlsDocument15 pagesRandom Vibration - An Overview - BarryControlsGuru75No ratings yet
- Calendar 2014: January February MarchDocument4 pagesCalendar 2014: January February Marchthulasi_krishnaNo ratings yet
- Bolt DesignDocument18 pagesBolt Designthulasi_krishnaNo ratings yet
- Lecture1 - History & IntroductionDocument20 pagesLecture1 - History & Introductionramaswamykama786100% (1)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- User Manual of TVI DVRDocument254 pagesUser Manual of TVI DVRwillcartoonNo ratings yet
- Data Structure Algorithm Using C PresentationDocument245 pagesData Structure Algorithm Using C PresentationdhruvwNo ratings yet
- Uniden User GuidesDocument1,059 pagesUniden User GuidesSensameaNo ratings yet
- CS Remote Care Datasheet v5Document4 pagesCS Remote Care Datasheet v5Horatiu OanaNo ratings yet
- How To Setup Travel To Fixed Stop" With CMMT-As-PN by Unsing The SINA - POS Telegram 111Document16 pagesHow To Setup Travel To Fixed Stop" With CMMT-As-PN by Unsing The SINA - POS Telegram 111NhanNo ratings yet
- Dam Automation Case StudyDocument6 pagesDam Automation Case StudyTarunPatraNo ratings yet
- Mininet Python API Reference ManualDocument75 pagesMininet Python API Reference ManualMahyuddin Husairi100% (2)
- Resume Yogeshwaran SDocument2 pagesResume Yogeshwaran Sbharathks641No ratings yet
- Erp Software at Nestlé Usa: Group 3: Le Thi Cam Tu Pham Thi Ngoc HanhDocument30 pagesErp Software at Nestlé Usa: Group 3: Le Thi Cam Tu Pham Thi Ngoc HanhLe Thi Cam TuNo ratings yet
- Flask-SQLAlchemy Documentation: Introduction into ContextsDocument54 pagesFlask-SQLAlchemy Documentation: Introduction into ContextsArjunneNo ratings yet
- Hacking Bluetooth Devices with Open Source ToolsDocument39 pagesHacking Bluetooth Devices with Open Source Toolsamhosny2010No ratings yet
- Dhevan Solaris ResumeDocument4 pagesDhevan Solaris ResumeRanjith KumarNo ratings yet
- Request For Proposal On - Location Based Service - LBS - RFP - 20190713Document13 pagesRequest For Proposal On - Location Based Service - LBS - RFP - 20190713AbeyMulugeta100% (2)
- ASSIGNMENT 1 Cad PDFDocument8 pagesASSIGNMENT 1 Cad PDFSasank SaiNo ratings yet
- Mymapúa - List of Coursera CourseDocument7 pagesMymapúa - List of Coursera CourseMigs DavidNo ratings yet
- Primavera P6 vs SAP PS: Comparing Project Management SoftwareDocument4 pagesPrimavera P6 vs SAP PS: Comparing Project Management SoftwareKusam AvinashNo ratings yet
- 0417 Information and Communication TechnologyDocument7 pages0417 Information and Communication TechnologysimplesaiedNo ratings yet
- Math 8a Final Exam ReviewDocument9 pagesMath 8a Final Exam Reviewapi-234811006No ratings yet
- Pubg Vs CodDocument46 pagesPubg Vs CodASSISTANT HR MANAGERNo ratings yet
- Yocto Kernel Lab - Traditional Kernel RecipeDocument39 pagesYocto Kernel Lab - Traditional Kernel Recipejohn bougsNo ratings yet
- Waters DP 2017 R2 Installation and Configuration Guide 715005543raDocument37 pagesWaters DP 2017 R2 Installation and Configuration Guide 715005543racarlos julio german ariasNo ratings yet
- Xpri Ns v5.3 User's GuideDocument877 pagesXpri Ns v5.3 User's GuideMundo IPTV100% (2)
- HyBase6100 Service Manual V1.0 enDocument88 pagesHyBase6100 Service Manual V1.0 enLeoni Anjos77% (22)
- Lec 4Document47 pagesLec 4chris topherNo ratings yet
- As A PDF - 59c0e90d1723dde1101f1b38 PDFDocument76 pagesAs A PDF - 59c0e90d1723dde1101f1b38 PDFDurgesh KollaNo ratings yet
- Group 2 - Roots of Nonlinear EquationsDocument35 pagesGroup 2 - Roots of Nonlinear Equationskaye0% (1)
- E-1612-UB Datasheets Sheet PDFDocument19 pagesE-1612-UB Datasheets Sheet PDFjulioNo ratings yet
- TM Mic Opmaint EngDocument186 pagesTM Mic Opmaint Engkisedi2001100% (2)
- Cisco Commands For CCNA-CCNP PDFDocument5 pagesCisco Commands For CCNA-CCNP PDFkrunalNo ratings yet
- Question No 1:: Implement The Above Algorithms in Java Language. Use Proper Indentation and Comments in Your CodeDocument5 pagesQuestion No 1:: Implement The Above Algorithms in Java Language. Use Proper Indentation and Comments in Your CodeTAHREEM FATIMANo ratings yet